
技术摘要:
本发明公开了一种移动机器人路径平滑方法,首先介绍了拐点和无关点的概念和确定方法,以及拐点关系矩阵建立步骤,并在此基础上设计了路径平滑方法,能够实现初始路径的平滑,让路径变得更短、更流畅。同时,本发明提供的路径平滑方法能够与其他任何路径规划算法进行结 全部
背景技术:
在互联网与人工智能技术的迅猛发展的大背景下,智能移动机器人技术也在不断 创新,其中路径规划算法是移动机器人研究中的一个重要关键所在。目前,关于移动机器人 路径规划算法的研究内容丰富多样,但一些算法受自身性能的影响导致规划得到的路径存 在一些不必要的转折点,通过一定的方法对这些不必要的转折点进行平滑,实际上不仅能 够进一步挖掘更短的路径,而且还能使路径变得更加流畅。因此,对路径平滑算法的研究也 是目前研究路径规划技术的一个重要研究方向。
技术实现要素:
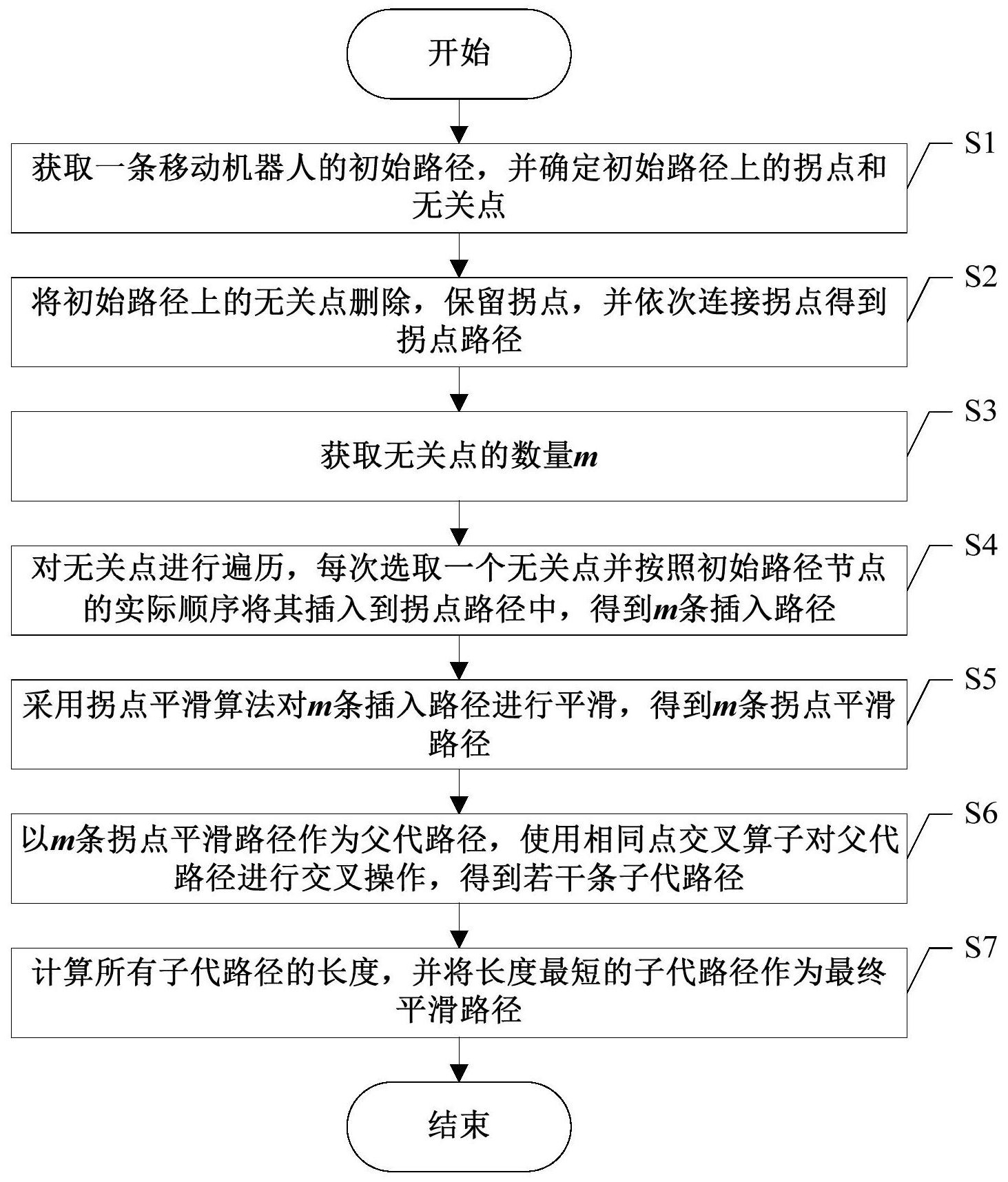
本发明的目的是提出一种移动机器人路径平滑方法,对移动机器人的初始路径进 行平滑,使路径更短且更流畅。 本发明的技术方案为:一种移动机器人路径平滑方法,包括以下步骤: S1、获取一条移动机器人的初始路径,并确定初始路径上的拐点和无关点。 S2、将初始路径上的无关点删除,保留拐点,并依次连接拐点得到拐点路径。 S3、获取无关点的数量m。 S4、对无关点进行遍历,每次选取一个无关点并按照初始路径节点的实际顺序将 其插入到拐点路径中,得到m条插入路径。 S5、采用拐点平滑算法对m条插入路径进行平滑,得到m条拐点平滑路径。 S6、以m条拐点平滑路径作为父代路径,使用相同点交叉算子对父代路径进行交叉 操作,得到若干条子代路径。 S7、计算所有子代路径的长度,并将长度最短的子代路径作为最终平滑路径。 进一步地,步骤S1中确定初始路径上的拐点和无关点的具体方法为: A1、从初始路径上任意选取相邻的3个节点。 A2、将3个节点中每相邻的两个节点相连,得到两条连线。 A3、计算两条连线的斜率值。 A4、判断两个斜率值是否相等,若相等则将位于中间位置的节点确定为无关点,否 则将位于中间位置的节点确定为拐点。 A5、重复步骤A1-A4,直到初始路径中除起点和终点外的所有节点都确定为拐点或 无关点,进入步骤A6。 A6、将初始路径中的起点和终点确定为拐点。 进一步地,步骤S5中采用拐点平滑算法对插入路径进行平滑的具体方法为: B1、获取一条插入路径,确定插入路径上的拐点和无关点,将无关点删除,保留拐 点,得到拐点路径。 4 CN 111552288 A 说 明 书 2/8 页 B2、对拐点路径中的拐点进行排序,确定拐点关系矩阵。 B3、设置计数值i=1,根据拐点关系矩阵确定第i个拐点的关系集合。 B4、记录第i个拐点,并在第i个拐点的关系集合中按照逆序的方式找到第1个不等 于0的关系值gdij,确定该关系值gdij所在列的序号j。 B5、令计数值i=j,判断第i个拐点是否为终点,若是则进入步骤B6,否则返回步骤 B4。 B6、顺序连接步骤B4中记录的所有拐点,得到拐点平滑路径。 进一步地,步骤B2中确定拐点关系矩阵的具体方法为: C1、按照拐点排序结果依次计算拐点路径中每一个拐点与其他所有拐点之间的关 系值。 C2、将每一个拐点与其他所有拐点之间的关系值构成该拐点的关系集合。 C3、将每一个拐点的关系集合作为一个行向量,构建拐点关系矩阵。 进一步地,步骤C1中任意两个拐点GDi与GDj的关系值gdij的计算方法为: (1)当i=j时,gdij=0,表示拐点不与自身建立关系。 (2)当i>j时,gdij=0,表示拐点不与其自身所在位置之前的拐点建立关系。 (3)当i











