
技术摘要:
本发明提供了一种工频电磁场探头、电力巡线无人机导航装置和方法,探头设置在用于对交流电力线进行巡线的无人机上,探头的形状为长方体,探头的第一侧面设置有磁场传感器,第一侧面的四个相邻侧面均设置有电场传感器;探头的内部设置有处理模块;磁场传感器在无人机巡 全部
背景技术:
无人机导航技术通常是基于GPS或者北斗导航系统的,由无人机所携带的导航接 收模块,接收空间卫星导航的信号,从而识别定位自己的位置,并依据所设计的航点和航线 进行导航。 目前,在电力巡检领域,可以采用无人机对交流电力线路进行巡线,即让无人机沿 着架空输电线路飞行,在飞行过程中采集图像等信息,但是,有些地方由于环境恶劣或者天 气条件原因,可能会存在卫星导航信号不好的情况,并且,电力设备的无线电也可能会干扰 到无人机对导航信号的正常接收,导致无人机不能按照导航飞行,容易发生飞行事故。
技术实现要素:
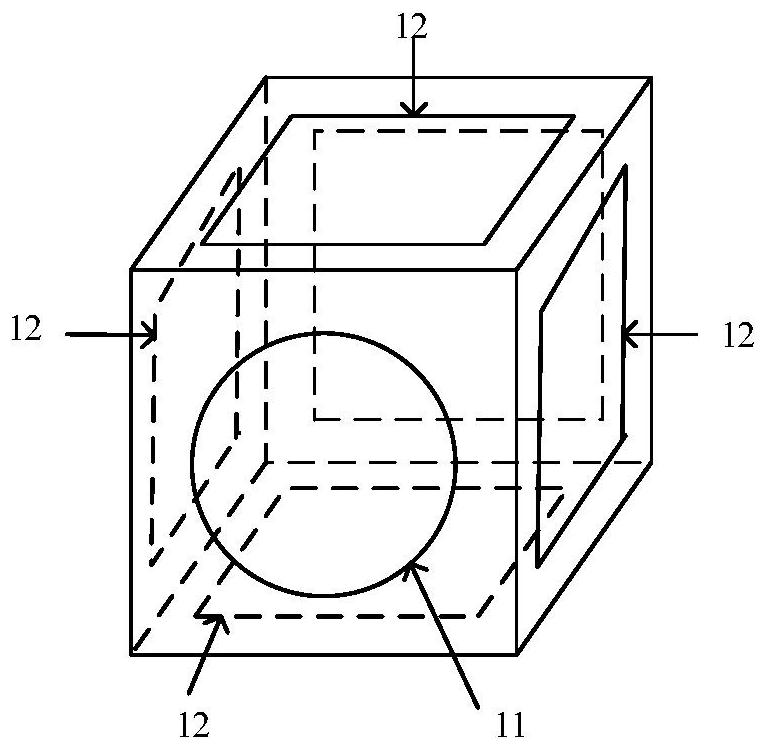
本发明的目的在于提供一种工频电磁场探头、电力巡线无人机导航装置和方法, 以缓解目前在卫星导航信号缺失的情况下,电力巡线无人机不能按照导航飞行的技术问 题。 第一方面,本发明实施例提供一种工频电磁场探头,所述探头设置在用于对交流 电力线进行巡线的无人机上,所述探头的形状为长方体,所述探头的第一侧面设置有磁场 传感器,所述第一侧面的四个相邻侧面均设置有电场传感器;所述探头的内部设置有处理 模块,所述处理模块分别与所述磁场传感器和所述电场传感器连接; 所述磁场传感器,用于在所述无人机巡线旋转过程中,测量所述第一侧面处于不 同位置时由所述交流电力线产生的工频磁场强度值; 四个所述电场传感器,用于在所述无人机巡线飞行过程中,分别测量所述第一侧 面的四个相邻侧面所在位置由所述交流电力线产生的工频电场强度值; 所述处理模块,用于将所述工频磁场强度值和所述工频电场强度值发送给所述无 人机的控制模块,以使所述控制模块根据所述工频磁场强度值确定所述交流电力线的走向 以及根据所述工频电场强度值确定所述无人机相对于所述交流电力线的位置。 在可选的实施方式中,所述第一侧面的相对侧面设置有所述电场传感器。 在可选的实施方式中,所述探头的内部还设置有供电模块,所述供电模块与所述 处理模块连接。 第二方面,本发明实施例提供一种电力巡线无人机导航装置,包括前述实施方式 任一项所述的工频电磁场探头,所述探头设置在用于对交流电力线进行巡线的无人机上, 且所述探头的第一侧面的四个相邻侧面中的一个朝向地面,还包括控制模块,所述控制模 块与所述工频电磁场探头连接; 所述探头,用于在所述无人机巡线旋转过程中,通过磁场传感器测量所述第一侧 4 CN 111579882 A 说 明 书 2/8 页 面处于不同位置时由所述交流电力线产生的工频磁场强度值,以及在所述无人机巡线飞行 过程中,通过四个电场传感器测量所述第一侧面的四个相邻侧面所在位置由所述交流电力 线产生的工频电场强度值,向所述控制模块发送所述工频磁场强度值和所述工频电场强度 值; 所述控制模块,用于根据所述工频磁场强度值确定所述交流电力线的走向以及根 据所述工频电场强度值确定所述无人机相对于所述交流电力线的位置,根据所述交流电力 线的走向和所述位置控制所述无人机飞行。 在可选的实施方式中,所述探头设置在所述无人机的机身的顶部中间。 在可选的实施方式中,所述控制模块,还用于确定所述工频磁场强度值的最小值, 获取所述最小值对应的所述第一侧面的朝向,控制所述无人机沿所述朝向飞行,所述朝向 为所述交流电力线的走向。 在可选的实施方式中,所述探头的第一侧面朝向无人机的前进方向。 在可选的实施方式中,所述控制模块,还用于根据所述工频电场强度值中由两对 同一个轴向的两个电场传感器测量的工频电场强度值的差异,以及预先得到的所述交流电 力线的工频电磁场空间分布,确定所述无人机相对于所述交流电力线的方位和距离,根据 所述方位和距离控制所述无人机在相对于所述交流电力线的目标距离范围内飞行。 第三方面,本发明实施例提供一种电力巡线无人机导航方法,应用前述实施方式 任一项所述的电力巡线无人机导航装置,所述装置包括工频电磁场探头和控制模块,所述 方法包括: 所述探头在所述无人机巡线旋转过程中,通过磁场传感器测量所述第一侧面处于 不同位置时由交流电力线产生的工频磁场强度值,以及在所述无人机巡线飞行过程中,通 过四个电场传感器测量所述第一侧面的四个相邻侧面所在位置由所述交流电力线产生的 工频电场强度值,向所述控制模块发送所述工频磁场强度值和所述工频电场强度值; 所述控制模块根据所述工频磁场强度值确定所述交流电力线的走向以及根据所 述工频电场强度值确定所述无人机相对于所述交流电力线的位置,根据所述交流电力线的 走向和所述位置控制所述无人机飞行。 在可选的实施方式中,所述控制模块根据所述工频磁场强度值确定所述交流电力 线的走向以及根据所述工频电场强度值确定所述无人机相对于所述交流电力线的位置,根 据所述交流电力线的走向和所述位置控制所述无人机飞行的步骤,包括: 所述控制模块确定所述工频磁场强度值的最小值,获取所述最小值对应的无人机 飞行方向下的所述第一侧面的朝向,控制所述无人机沿所述朝向飞行,所述朝向为所述交 流电力线的走向; 所述控制模块根据所述工频电场强度值中由两对同一个轴向的两个电场传感器 测量的工频电场强度值的差异,以及预先得到的所述交流电力线的工频电磁场空间分布, 确定所述无人机相对于所述交流电力线的方位和距离,根据所述方位和距离控制所述无人 机在相对于所述交流电力线的目标距离范围内飞行。 本发明实施例提供的上述工频电磁场探头,设置在用于对交流电力线进行巡线的 无人机上,探头的形状为长方体,探头的磁场传感器在无人机巡线旋转过程中,测量第一侧 面处于不同位置时由交流电力线产生的工频磁场强度值;电场传感器在无人机巡线飞行过 5 CN 111579882 A 说 明 书 3/8 页 程中,测量第一侧面的四个相邻侧面所在位置时由交流电力线产生的工频电场强度值;处 理模块将工频磁场强度值和工频电场强度值发送给无人机的控制模块,以使控制模块根据 工频磁场强度值确定交流电力线的走向以及根据工频电场强度值确定无人机相对于交流 电力线的位置,从而根据电力线的走向和无人机相对于电力线的位置控制无人机飞行。因 此,在卫星导航信号缺失的情况下,也可以实现无人机的电力巡线导航,使无人机保持好与 电力线的距离,可以避免无人机撞上电力线而导致飞行事故。 本发明实施例提供的上述电力巡线无人机导航装置和方法中,探头在无人机巡线 旋转过程中,通过磁场传感器测量第一侧面处于不同位置由交流电力线产生的工频磁场强 度值,以及在无人机巡线飞行过程中,通过四个电场传感器测量第一侧面的四个相邻侧面 所在位置由交流电力线产生的工频电场强度值;无人机的控制模块根据工频磁场强度值确 定交流电力线的走向以及根据工频电场强度值确定无人机相对于交流电力线的位置,根据 电力线的走向和位置控制无人机飞行。因此,在卫星导航信号缺失的情况下,也可以实现无 人机的电力巡线导航,使无人机保持好与交流电力线的距离,可以避免无人机撞上交流电 力线而导致飞行事故。 另外,第一侧面的磁场传感器随着无人机旋转测量到最小工频磁场强度值,以识 别交流电力线的走向,用于指示无人机飞行的方向。通过第一侧面的四个相邻侧面上的四 个电场传感器测量的工频电场强度值及交流电力线的空间工频电磁场分布,可以确定无人 机相对于交流电力线的方位和距离。从而为无人机的交流电力线避障提供了具有竞争力的 解决方案。 附图说明 为了更清楚地说明本发明











