
技术摘要:
本申请提供了一种用于变电站绝缘瓷瓶的清洗机器人,包括支撑模块、抬升模块和清洗模块。支撑模块用于支撑清洗机器人的整体重量,抬升模块与支撑模块固定连接,清洗模块位于清洗机器人的顶端并与抬升模块连接。当抬升模块沿垂直方向抬升时,清洗模块到达目标位置从而对 全部
背景技术:
绝缘瓷瓶子俗称瓷瓶,是用来支持导线的绝缘体,它可保证导线和横担、杆塔有足 够的绝缘。它在运行中应能承受导线垂直方向的荷重和水平方向的拉力,还经受着日晒、雨 淋、气候变化及化学物质的腐蚀。因此,绝缘瓷瓶既要有良好的电气性能,又要有足够的机 械强度。 一般来说,绝缘瓷瓶的电气故障有闪络和击穿两种。闪络发生在绝缘子表面,能够 见到烧伤痕迹,通常并不失掉绝缘性能;而击穿发生在绝缘子的内部,通过铁帽与铁脚间瓷 体放电,外表可能不见痕迹,但已失去绝缘性能。以闪络为例,其中的污秽闪络是危及电力 系统安全运行的重要事故源之一,在带电情况下对绝缘子表面定期进行清扫,防止绝缘子 串间的污秽,是避免污秽闪络发生的有效措施。 在现有技术中,为了保证绝缘瓷瓶表面的干净整洁,传统的瓷瓶清扫方法通常需 要电力工人手持瓷瓶进行清洗,而绝缘瓷瓶又比较重,人工清洗方式存在着工作效率慢、人 工成本高、容易损伤绝缘瓷瓶等问题,造成人力、物力和财力的浪费。针对带电清扫自动化 设备,国内外虽然进行了广泛的研究,但是现在市面上并没有一款专门针对绝缘瓷瓶的、清 洗效果和清洗效率俱佳的产品。
技术实现要素:
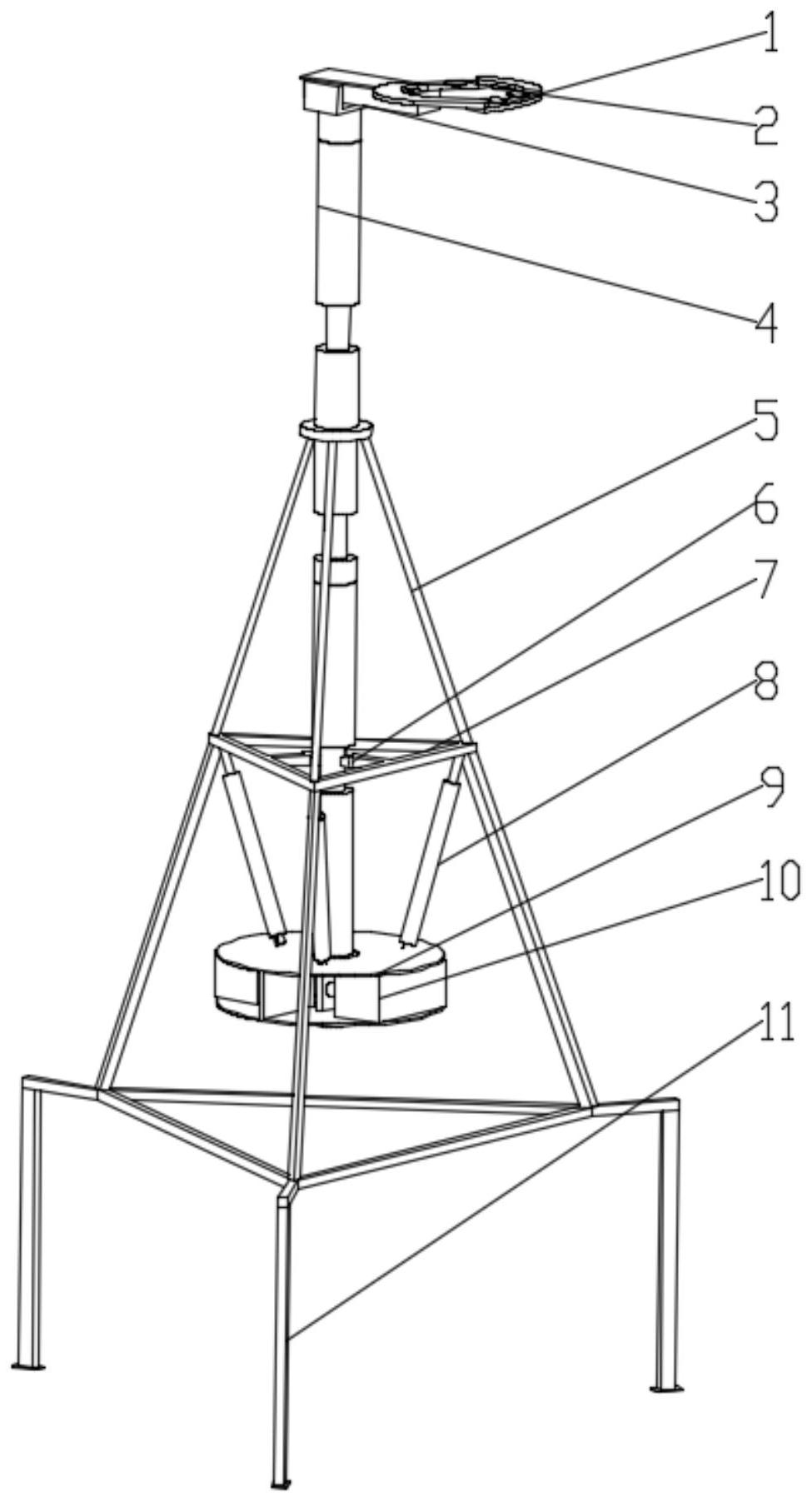
针对现有技术的绝缘瓷瓶清扫存在的上述缺陷,本申请提供了一种用于变电站绝 缘瓷瓶的清洗机器人。 依据本申请的一个方面,提供了一种用于变电站绝缘瓷瓶的清洗机器人,包括支 撑模块、抬升模块和清洗模块, 其中,所述支撑模块用于支撑所述清洗机器人的整体重量,所述抬升模块与所述 支撑模块固定连接,所述清洗模块位于所述清洗机器人的顶端并与所述抬升模块相连接, 当所述抬升模块沿垂直方向抬升时,所述清洗模块到达目标位置从而对所述变电站绝缘瓷 瓶进行自动清洗操作。 在一具体实施例,所述支撑模块包括稳定架、外框支架和脚架,脚架安装在外框支 架的下方并且通过螺纹固定外框支架,稳定架安装在外框支架的上方并且与外框支架相 连。 在一具体实施例,脚架包括三个L型立柱,每个L型立柱的水平端与外框支架下层 的对应顶点相连,稳定架与外框支架上层的对应顶点相连,其中,稳定架与外框支架共同构 成一个四面体结构,所述抬升模块设置于所述四面体结构围成的空间内。 在一具体实施例,所述抬升模块包括接续杆、第一气缸、电动推杆、气缸架以及第 3 CN 111590603 A 说 明 书 2/3 页 二气缸,其中,接续杆通过螺纹连接加长并利用第一气缸夹紧固定于外框支架的中心位置, 第二气缸通过螺丝固定安装在气缸架的内侧,电动推杆位于气缸架的上方,气缸架通过螺 丝固定到电动推杆的一端,电动推杆的另一端通过螺丝固定到外框支架。 在一具体实施例,清洗模块包括机械手爪、毛刷以及T型滑台,机械手爪与T型滑台 相连接,毛刷安装在机械手爪的末端,其中,T型滑台通过螺纹连接于接续杆的顶端。 在一具体实施例,当接续杆抬升到一定高度时,T型滑台推出并移动到所述绝缘瓷 瓶前方,机械手爪合拢并夹住所述绝缘瓷瓶的表面,毛刷进行清洗操作。 在一具体实施例,接续杆包括第一缺口及位于第一缺口上方的第二缺口,当第二 气缸抓紧接续杆的第一缺口时,电动推杆缩回从而将接续杆抬升;当接续杆的第二缺口对 准第一气缸时,第一气缸推出并夹紧接续杆,完成竖直方向的一次抬升动作。 采用本发明的用于变电站绝缘瓷瓶的清洗机器人,包括支撑模块、抬升模块和清 洗模块。支撑模块用于支撑清洗机器人的整体重量,抬升模块与支撑模块固定连接,清洗模 块位于清洗机器人的顶端并与抬升模块连接。当抬升模块沿垂直方向抬升时,清洗模块到 达目标位置从而对变电站绝缘瓷瓶进行自动清洗操作。相比于现有技术,本发明的绝缘瓷 瓶清洗机器人基于气动手爪抓取技术,通过电动推杆使其在竖直方向上移动,以实现垂直 绝缘瓷瓶的清洗作业,运动灵活、环境适应性强、清洗效率高。 附图说明 读者在参照附图阅读了本发明的











