
技术摘要:
本发明公开了一种基于深度模仿学习的无人直升机自主特技飞行方法,包括获取直升机飞行数据构建无人直升机的系统模型并确认系统模型数据;利用系统模型数据构建数据缓存器;通过直升机特定和飞行数据构建无人直升机自主特技飞行的深度模拟学习网络模型;对飞行数据进行 全部
背景技术:
无人机直升机在飞行过程中不需要人直接参与,并且可以实现垂直起降、固定点 悬停、后向飞行等,在军事和民事领域都发挥着巨大的作用。近年来,国内外的研究者都认 识到了无人直升机在未来战争和商业中的作用,纷纷加大了研发力度,使其成为了机器人 发展中的一个重要方向。但无人机本身是一个高阶、时变、欠驱动的复杂非线性系统,与空 气动力学、发动机动力学、震动等现象高度耦合,使得无人直升机的自主飞行成为一项十分 具有挑战性的工作,尤其是自主特技飞行。 无人直升机技术以美国、德国、法国和日本作为先进,我国则是在多旋翼无人机方 面取得了重大进展,大疆的多旋翼无人机更是在全球市场占领重要份额,但我国无人直升 机技术的发展与发达国家还有很大差距。目前,在全球范围内,无人直升机的自主悬停、自 主降落和低中速飞行等“垂直模式”的技术已经相对成熟,但在自主特技飞行这一“高级模 式”的技术还很不成熟,研究成果也很少,美国的研究人员实现了轴向S弯急转和倒悬停,迄 今为止世界范围内最先进的研究成果是伯克利的直升机研究团队通过人类专家的示教能 够使无人直升机自主完成20类特技动作。通过示教的方法虽然能够使得无人机完成人类专 家能够完成的各类特技飞行动作,但该方法无法完成没有人类专家事先演示的特技飞行动 作,而这样的特技飞行并非真正的自主特技飞行。
技术实现要素:
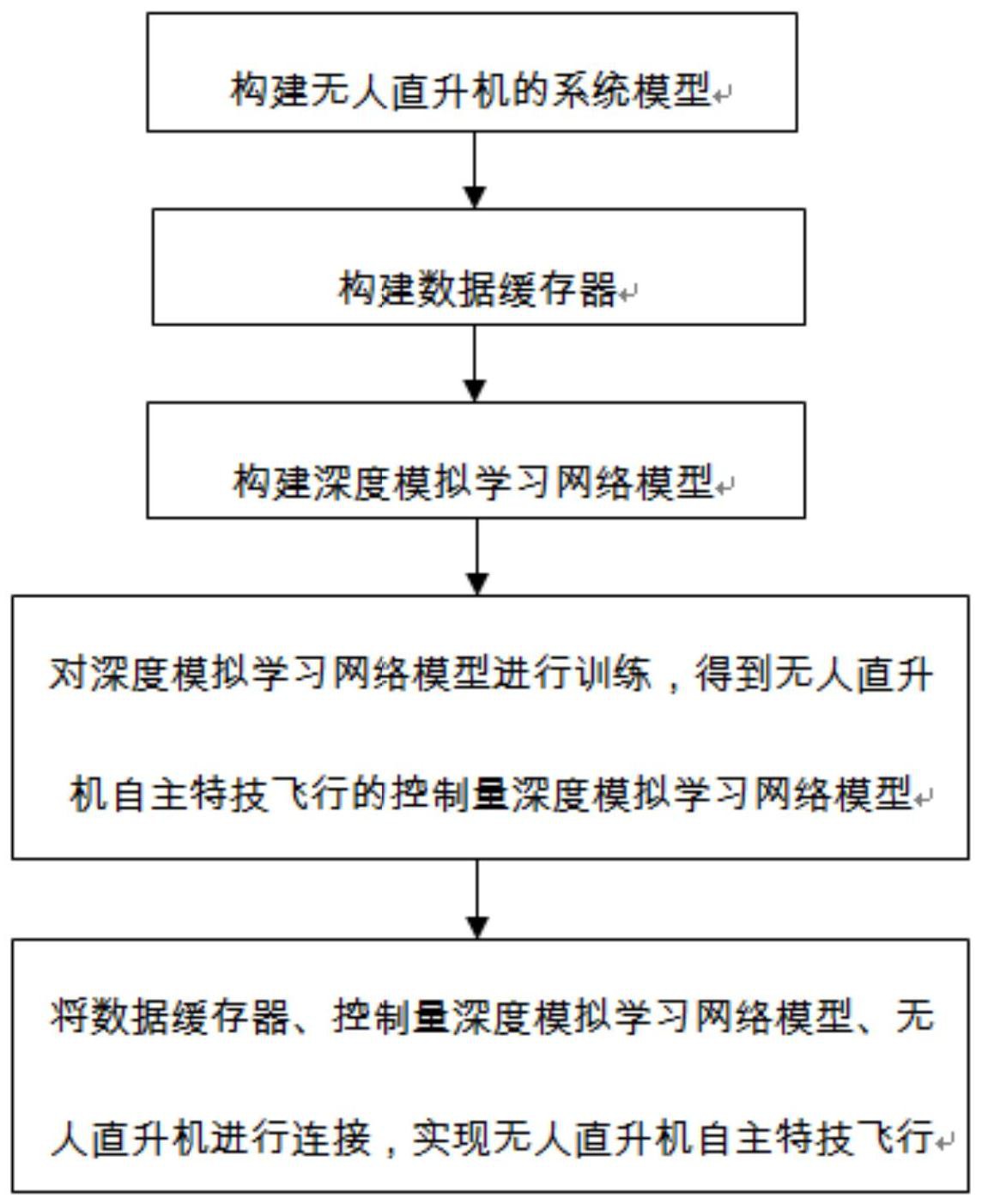
本发明的目的在于提供一种基于深度模仿学习的无人直升机自主特技飞行方法。 实现本发明目的技术解决方案为:一种基于深度模仿学习的无人直升机自主特技 飞行方法,包括如下步骤: 获取直升机飞行数据构建无人直升机的系统模型并确认系统模型数据; 利用系统模型数据构建数据缓存器; 通过直升机特点和飞行数据构建无人直升机自主特技飞行的深度模拟学习网络 模型; 对飞行数据进行处理后对深度模拟学习网络模型进行训练,得到无人直升机自主 特技飞行的控制量深度模拟学习网络模型; 将数据缓存器、控制量深度模拟学习网络模型、无人直升机进行连接。 进一步地,所述无人直升机的系统模型的函数表达式为: 5 CN 111580560 A 说 明 书 2/5 页 p为无人直升机的位置, 为p的导数,代表无人直升机的 速度, q为表示姿态的四元数 , 为四元数q的导数 , v为原点处的线速度, 为v的导数,代表无人直升机的线加速度, ω为原点处的角速度, 为ω的导数,代表无人直升机的角加速 度,M(q)为方向余弦矩阵,Q(q)为四元数转换矩阵,S(ω)和S(Jω)为斜对称矩阵, m 为 无 人 直 升 机 的 质 量 , g 为 表 示 重 力 , A,B,C2 ,D1 , 均为待识别的常数矩阵, 为待识别的常 数,J为惯性矩阵, τ1、τ2为控制量,τ1=[0,0,u ]T4 , u1为横 向的循环螺距控制,u2为纵向的循环螺距控制,u3为尾轴偏转推力,u4为影响主旋翼推力。 其中,M(q)的函数表达式为: Q(q)的函数表达式为: 其中e1、e2、e3、e4为四元数的基本单位。 进一步地,所述确认系统模型数据的具体为通过获取到的飞行数据对系统模型数 据中的A、B、C2、D1、D2的值进行确认。 进一步地,所述利用系统模型数据构建数据缓存器的具体方法为通过实时无人直 升机的状态量和控制量构建数据缓存器。 进一步地,所述深度模拟学习网络模型自上而下依次由数据层data、卷积层 Conv1、卷积层Conv2、降采样层Pool3、全连接层Fc4、全连接层Fc5、全连接层Fc6,损失层 Loss构成。 进一步地,所述卷积层Conv1的卷积核大小为5×3,滤波器个数为16,卷积层Conv2 的卷积核大小为5×3,滤波器个数为32,降采样层Pool3的卷积核大小为2×2,步长为2,全 连接层Fc4、全连接层Fc5、全连接层Fc6的神经元个数分别为64,32和4,损失层Loss的类型 为Euclidean。 进一步地,所述通过直升机特点和飞行数据构建无人直升机自主特技飞行的深度 模拟学习网络模型的具体方法为: S1、数据层data获取数据缓存器的数据并上传至卷积层Conv1、卷积层Conv2; 6 CN 111580560 A 说 明 书 3/5 页 S2、卷积层Conv1、卷积层Conv2提取数据中的运动基元并上传至降采样层Pool3。 S3、降采样层Pool3对运动基元中冗余部分进行去除,并上传至全连接层Fc4、全连 接层Fc5、全连接层Fc6; S4、全连接层Fc4、全连接层Fc5、全连接层Fc6对运动基元进行组合赋予不同的权 重后重构特技轨迹,并输出至损失层Loss; S5、损失层Loss计算重构特技轨迹与真实结果之间的损失值,计算出损失值后利 用该损失值通过梯度下降算法对网络的权重进行优化调整得到深度模拟学习网络模型。 进一步地,所述对飞行数据进行处理后对深度模拟学习网络模型进行训练,得到 无人直升机自主特技飞行的控制量深度模拟学习网络模型的具体方法为: S1、对飞行数据集进行归一化处理; S2、将飞行数据集中的多类特技动作按照设定时间为间隔划分轨迹片段,选取 60%~80%多类特技动作,并在每类从中随机选取20%~60%作为训练集和验证集,每类 中剩余的和其他特技动作作为测试集; S3、采用随机梯度下降方法对深度模仿学习的参数进行更新得到无人直升机自主 特技飞行的控制量深度模拟学习网络模型。 进一步地,所述归一化处理的计算公式为: 式中,x为飞行数据集中的数据,xmin为x的最小值,xmax为x的最大值,y为对x 归一化处理后的值,ymax和ymin为默认的可设定参数,分别设为1和-1。 进一步地,所述随机梯度下降方法的计算公式为: 式中,ε为学习速率, 为针对权重θ的微分,n为minibatch的大小,x(i)为训练样本 中样例,L(f(x(i);θ),yi)为损失函数,y(i)为对应的标签。 与现有技术相比,本发明的有益效果: 本发明能够实现真正的无人直升机自主特技飞行,且控制精度高、稳定性好。 附图说明 图1为本发明方法流程示意图; 图2为本发明系统模型结构示意图; 图3为数据缓存器、控制量深度模拟学习网络模型、无人直升机连接示意图。











