
技术摘要:
本申请提供了一种图像传感装置和电子设备,所述图像传感装置包括摄像头和TOF模组。所述TOF模组包括:TOF发射组件,包括光源和匀光元件,所述匀光元件设置在所述光源的出光一侧,其中,所述光源用于发出红外光脉冲,所述匀光元件用于将所述光源发射的红外光脉冲调整为强 全部
背景技术:
随着3D传感技术的高速发展,越来越多的电子设备开始采用3D传感模组来感测3D 场景信息。例如,3D人脸识别技术、3D手势识别技术、AR/VR、3D图绘制、3D测距、无人驾驶技 术等成为各大厂商当前的研发热点。例如,以3D人脸识别技术为例,其是基于人的脸部特征 进行身份识别的一种生物识别技术。 基于深度信息的3D人脸识别技术更能保证人脸识别的安全性,但是,采用该技术 的电子设备上需要配置深度相机和2D相机,以及对应的光源和其他辅助电路,需要占用电 子设备的一定的空间,不能满足电子设备的小型化,轻薄化的需求。
技术实现要素:
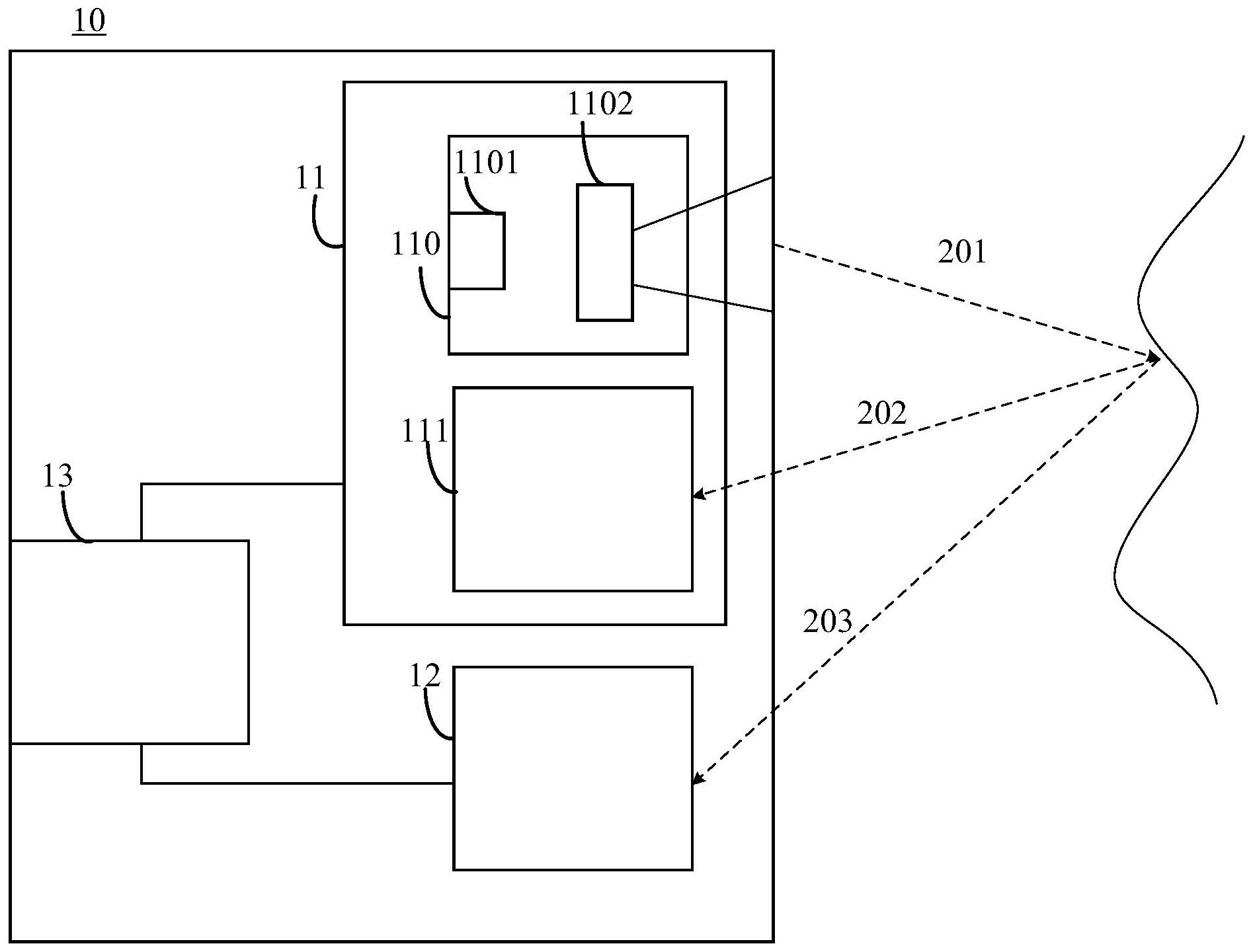
本申请提供一种图像传感装置和电子设备,能够降低成本,减小对电子设备的空 间的占用。 第一方面,提供了一种图像传感装置,包括:摄像头和TOF模组,其中,所述TOF模组 包括: TOF发射组件,包括光源和匀光元件,所述匀光元件设置在所述光源的出光一侧, 其中,所述光源用于发出红外光脉冲,所述匀光元件用于将所述光源发射的红外光脉冲调 整为强度分布均匀的红外泛光脉冲,并将所述红外泛光脉冲投射到待测对象上;和 TOF接收组件,用于接收所述TOF发射组件发射到所述待测对象并从所述待测对象 返回的的红外泛光脉冲,以及根据所述红外泛光脉冲获取所述待测对象的深度信息; 所述摄像头用于接收所述TOF发射组件发射到所述待测对象并从所述待测对象返 回的的红外泛光脉冲,以及根据所述红外泛光脉冲获取所述待测对象的二维图像。 在一些可能的实现方式中,所述TOF模组为I-TOF模组,所述TOF接收组件根据接收 到的红外泛光脉冲与所述TOF发射组件发射出去的红外泛光脉冲之间的相位差来获得待测 对象的深度信息;或,所述TOF模组为D-TOF模组,所述D-TOF模组根据接收到的红外泛光脉 冲与所述TOF发射组件发射出去的红外泛光脉冲之间的时间差来获得待测对象的深度信 息。 在一些可能的实现方式中,所述摄像头与所述TOF接收组件同时或分时接收从所 述待测对象返回的红外泛光脉冲以分别获取所述待测对象的二维图像和深度信息。 在一些可能的实现方式中,所述图像传感装置还包括: 控制单元,用于控制所述摄像头和所述TOF接收组件接收从所述待测对象返回的 红外泛光脉冲的顺序。 在一些可能的实现方式中,所述控制单元用于: 控制所述摄像头首先接收从所述待测对象返回的红外泛光脉冲,以获取所述待测 4 CN 111598073 A 说 明 书 2/15 页 对象的二维图像; 在所述待测对象的二维图像存在人脸图像的情况下,控制所述TOF接收组件接收 从所述待测对象返回的红外泛光脉冲,以获取所述待测对象的深度信息;或 所述控制单元用于: 控制所述TOF接收组件首先接收从所述待测对象返回的红外泛光脉冲,以获取所 述待测对象的深度信息; 在所述待测对象的深度信息符合人脸特征或立体物体特征的情况下,控制所述摄 像头接收从所述待测对象返回的红外泛光脉冲,以获取所述待测对象的二维图像。 在一些可能的实现方式中,所述TOF模组还包括驱动组件,用于驱动所述TOF发射 组件中的光源发射所述红外光脉冲。 在一些可能的实现方式中,所述驱动组件设置在所述TOF接收组件中。 在一些可能的实现方式中,所述光源为点阵光源,所述点阵光源包括多个间隔设 置的发光点,每个发光点用于发射光束,每个发光点发出的光束包括多个红外光脉冲,所述 多个红外光脉冲为连续的且具有周期性。 在一些可能的实现方式中,所述匀光元件为扩散片、DOE、或微透镜阵列中的任意 一种。 第二方面,提供了一种电子设备,包括如第一方面或其任一可能实现方式中的图 像传感装置。 基于上述技术方案,用于二维成像的成像装置和用于深度成像的成像装置可以共 用一个光源,这样,不需要为用于二维成像的成像装置专门设置对应的光源,也就不需要配 置该光源对应的其他辅助电路,例如光源的驱动电路,从而能够减少图像传感装置的器件 的数量,降低了产品的成本,同时降低所述图像传感装置的尺寸,更加能够适用于对尺寸和 空间有要求的电子设备。 附图说明 图1是根据本申请实施例的图像传感装置的示意性图。 图2是根据本申请实施例的电子设备的示意性图。 图3是根据本申请另一实施例的图像传感装置的示意性图。 图4是根据本申请另一实施例的电子设备的示意性图。











