
技术摘要:
本发明公开了一种机器人的自适应充电系统,包括:设置在机器人上用于采集外界用于对机器人进行充电的充电终端的地理位置信息的获取单元;前期分析单元读取该地理位置、并根据机器人的实际地理位置为机器人运行至该充电终端计划运行轨迹;调控机构根据前期分析单元传送 全部
背景技术:
在人工智能飞速发展的时代、越来越多的机器人投入到市场并得到了广泛的应 用。因此对机器人的充电控制过程备受用户的关注、如何对机器人进行安全可靠的充电是 用户非常关注的问题,以往技术中采用人工手动的方式将机器人的插头与电源连接,但是 这种充电连接方式已经落后,大多数机器人采用自动充电的方式,即机器人可以在电量用 尽前自动运动至电源终端进行充电,然而该技术没有对机器人充电接口和电源接口进行精 准的控制,造成多次插接失败的现象。
技术实现要素:
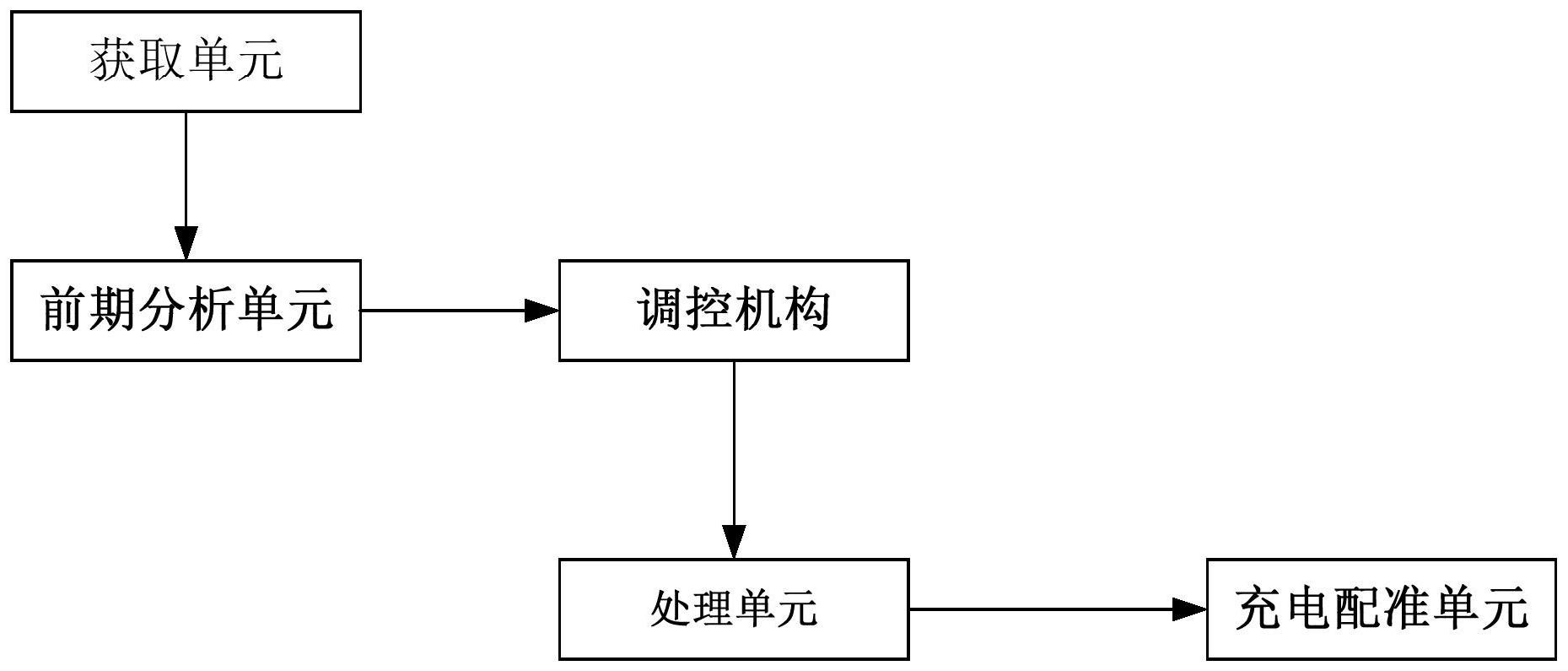
根据现有技术存在的问题,本发明公开了一种机器人的自适应充电系统,具体方 案包括: 设置在机器人上用于采集外界用于对机器人进行充电的充电终端的地理位置信 息的获取单元; 接收所述获取单元传送的地理位置信息的前期分析单元,所述前期分析单元读取 该地理位置、并根据机器人的实际地理位置为机器人运行至该充电终端计划运行轨迹; 对机器人的运动过程进行全方位控制的调控机构,所述调控机构根据前期分析单 元传送的运行轨迹控制机器人行走至充电终端处,获取机器人的充电接口距离充电终端的 的插座接口的高度信息,此时获取单元对充电终端进行图像采集:对充电终端处的插座接 口图像进行二值化预处理,提取二值化后图像序列中的每幅图像的轮廓图; 接收所述获取单元传送的轮廓图信息的处理单元,所述处理单元以轮廓图的三维 空间中的相邻像素点为顶点构建多个体元结构,将轮廓图中的像素点划分为实点和虚点, 读取体元结构中的实点和虚点信息并将其定义为边界体元,取边界体元中连接实点和虚点 的边的中点作为等值面三角形的顶点,采用上述方式在体元结构中建立三角形结构,提取 轮廓图中图像序列点集的全部三角形结构根据该三角形结构构建轮廓图的三维模型; 接收所述处理单元传送的三维模型以及调控机构传送的高度信息的充电配准单 元,所述充电配准单元根据机器人充电接口距离充电终端的插座接口的高度信息对机器人 进行360°全方位旋转和高度调节、调整机器人的充电接口运动至充电终端插座接口的正上 方、同时所述充电配准单元读取内部存储的机器人的充电接口的三维模型、同时将轮廓图 的三维模型与充电接口的三维模型进行配准实现充电接口的电源连通。 进一步的,对于充电终端的插座接口图像所述处理单元对其进行去燥处理,具体 采用如下方式: 将重合的像素提取出来,存入像素点集P; 对P中的第m个像素点,分别获取相邻20张图像中该像素邻近位置中像素点的灰度 4 CN 111555399 A 说 明 书 2/4 页 值g,若g>140,则记录为有效灰度值,对全部20张图片中的有效灰度值求和得到Gi,定义像 素点集P与该图像集的相关值 其中,n为P中像素点的数量。 进一步的,所述充电配准单元对三维模型进行降噪处理,具体采用如下方式:基于 均值滤波算法和中值滤波算法相结合的方式采用噪声点分离规则对三维模型进行降噪处 理,通过比较多种滤波算法的信燥比改善因子R来评价,其定义为: 式中,KL分别代表三维模型的长度和宽度,y(i,j)是滤波输出,s(i,j)是标准图 像,x(i,j)是输入图像,为了验证去燥质量,采用Lena图像进行不同算法滤波结果的对比实 验,若R是负值,则说明滤波后噪声被抑制;R越低,说明滤波效果越好。 该系统还包括电路检测单元,在机器人被充电状态下所述电路检测单元对充电过 程进行状态检测当发生短路或者断路情况下发出预警信号。 由于采用了上述技术方案,本发明提供的一种机器人的自适应充电系统,该充电 系统通过对机器人充电接口的三维图像进行在先存储,然后通过采集充电终端的插座接口 的三维图像、并对该三维图像进行前期处理、最后基于机器人充电接口的高度信息、对机器 人进行360°的旋转和高度的任意调节、实现机器人充电接口与充电终端的插座接口的精准 对接、在实际的连接过程中、机器人可以和电源端进行准确的一次实现对接,保证了机器人 的人工智能性。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下, 还可以根据这些附图获得其他的附图。 图1为本发明系统的结构示意图。











