
技术摘要:
座椅的扶手构造包括:扶手,构成为能沿座椅的横向宽度方向移动;引导块,构成为沿座椅的前后方向移动;以及操作部,构成为手动进行操作,以使所述引导块沿所述前后方向移动。所述扶手和所述引导块以能沿相对于座椅的横向宽度方向和前后方向倾斜的方向滑动的方式卡合。 全部
背景技术:
通常,在挖掘机等建筑机械的驾驶席的两侧设有扶手。此外,作为这样的扶手,已 知有例如日本特开平11-293702号公报所示那样,能调节上下的高度位置的扶手。 在这样的以往的扶手中,无法相对于座面在横向宽度方向移动扶手,因此存在无 法充分地对应操作者的体格、姿势的问题。 关于这一点,在日本实开平7-23461号公报(图8等)中记载了如下构造:设有从驾 驶席靠背向横向宽度方向突出的支承轴,通过调节该支承轴的左右方向突出量来进行扶手 的左右方向位置调节。 但是,在上述的日本实开平7-23461号公报记载的构成中,将扶手装配于从靠背 突出的支承轴,因此存在扶手的角度因靠背的斜倚而变化的问题。 此外,由于需要向横向宽度方向突出的支承轴,因此存在对扶手的布局施加了较 大的限制的问题。例如,以与扶手正交的方式配置有支承轴,因此存在如下问题:无法使构 造紧凑,此外,必须以从靠背绕到座椅的旁边的方式配置支承轴和扶手。 此外,在日本实开平7-23461号公报记载的构成中,若要使扶手的高度位置可变 更,则需要使每个对支承轴进行支承的构造上下移动的机构,因此存在构造复杂化的问题。
技术实现要素:
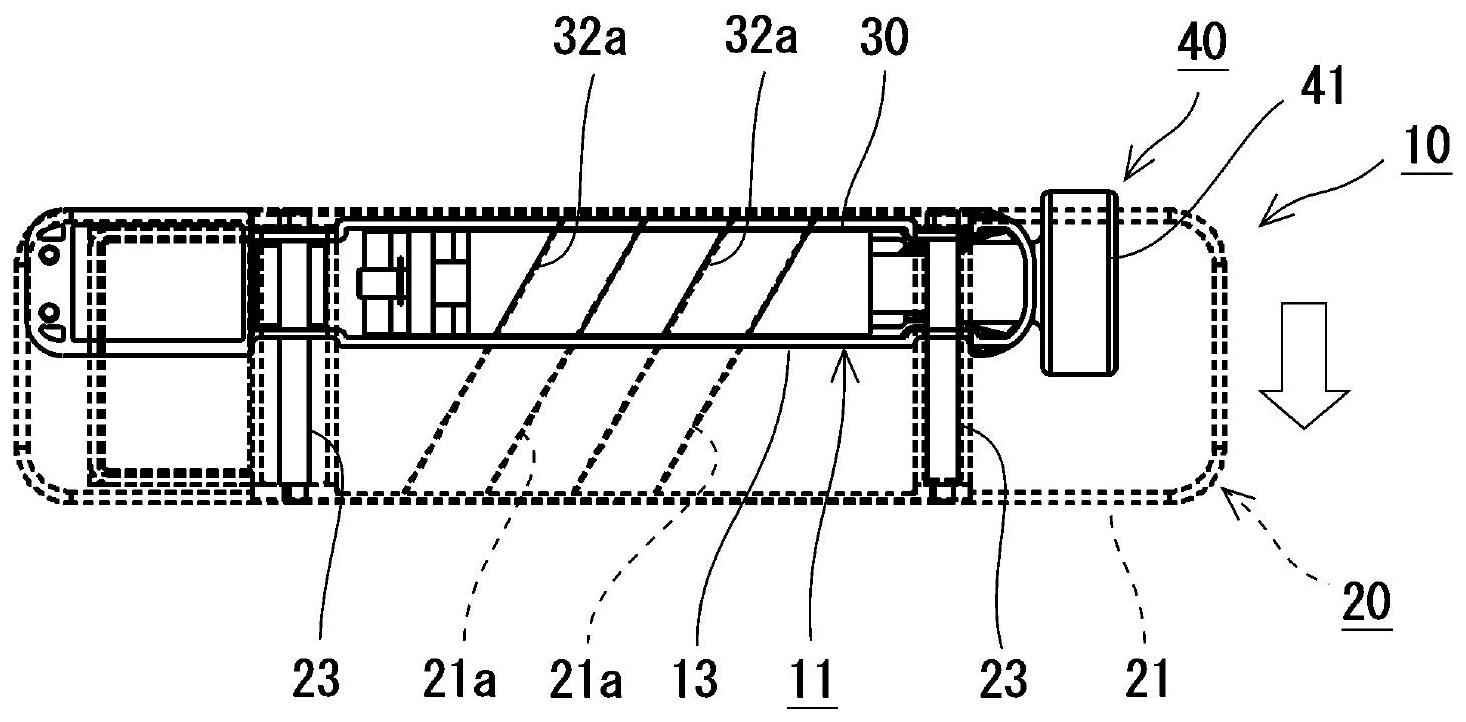
本发明提供一种即使不使用向横向宽度方向突出的支承轴,也能调整扶手的横向 宽度方向的位置的座椅的扶手构造。 根据本发明的一个方案,扶手构造具备:支承部;扶手,构成为能相对于所述支承 部沿座椅的横向宽度方向移动;引导块,构成为能相对于所述支承部沿座椅的前后方向移 动;以及操作部,构成为手动进行操作,以使所述引导块沿所述前后方向移动。所述扶手和 所述引导块沿相对于座椅的横向宽度方向和前后方向倾斜的方向可滑动地卡合。构成为与 所述操作部被操作而所述引导块沿所述前后方向移动的操作相应,所述扶手与所述引导块 联动地沿所述横向宽度方向移动。 根据本发明的所述方案,能相对于座面沿横向宽度方向移动扶手,因此能配合落 座者的体格、姿势来调整两侧的扶手的间隔。此外,由于可以不使用从靠背向横向宽度方向 突出的轴构件,因此扶手的角度不因斜倚而变化。此外,由于没有突出的构件,因此能提高 布局的自由度。并且,只要引导块相对于扶手上下重叠即可,因此即使不大幅变更现有的座 椅的布局、现有的扶手的构造,也能构成为能变更扶手的横向宽度方向的位置。 根据本发明的其他方案,也可以是,所述操作部包括能绕轴旋转的螺纹轴,所述引 导块装配于所述螺纹轴,与所述操作部被操作而所述螺纹轴旋转的所述操作相应,装配于 所述螺纹轴的所述引导块沿所述螺纹轴的轴向移动。如果如此构成,则仅通过使操作部进 3 CN 111572422 A 说 明 书 2/5 页 行轴旋转就能使扶手沿横向宽度方向移动,因此无需大幅移动操作部。由此,容易进行由落 座者进行的扶手的位置调整。此外,由于操作部不大幅移动,因此不必考虑操作部对其他构 件的干扰,因此不会损害座椅的布局的自由度。 根据本发明的其他方案,也可以是,所述操作部以所述螺纹轴与所述扶手的长尺 寸方向平行的方式配置于所述扶手的下方。根据这样的构成,能将引导块和操作部配置为 在扶手的下方重叠,因此能简单地保持扶手构造的设计。此外,能使扶手构造紧凑,因此不 会损害座椅的布局的自由度。 附图说明 图1是座椅的外观图。 图2是扶手构造的外观图。 图3A是从底面侧观察扶手和附件的立体图。 图3B是从底面侧观察扶手的立体图。 图4A是从扶手的底面侧观察卸下了滑动轴的扶手的立体图。 图4B是卸下了滑动轴的扶手的仰视图。 图4C是图4B中的卸下了滑动轴的扶手的A-A线剖视图。 图5A是表示引导块和操作部的立体图。 图5B是表示引导块和操作部的侧视图。 图5C是表示引导块和操作部的俯视图。 图5D是表示操作部的俯视图。 图6A是说明扶手构造的动作的俯视图,表示扶手向左侧移动后的状态。 图6B是说明扶手构造的动作的俯视图,表示扶手向右侧移动后的状态。 图7A是说明扶手构造的动作的侧面剖视图,表示引导块向后方移动后的状态(扶 手向左侧移动后的状态的图)。 图7B是说明扶手构造的动作的侧面剖视图,表示引导块向前方移动后的状态(扶 手向右侧移动后的状态的图)。











