
技术摘要:
本发明创造提供了一种高速公路入口匝道异质交通流车速引导系统及引导方法,包括:用于获取智能车车辆信息的智能车车载子系统,所述智能车车载子系统安装在智能车上;用于获取网联车车辆信息的网联车车载子系统,所述网联车车载子系统安装在网联车上;用于获取普通车车 全部
背景技术:
随着汽车保有量的激增,高速公路入口匝道处的事故和拥堵现象日益严重。同时, 随着智能网联技术的发展,各种不同智能网联程度的车辆将陆续出现在道路交通中,未来 将长期存在异质交通流在道路上混行的现象。 智能网联技术的发展可以实现个体车辆的精准控制,从而为速度引导治理交通拥 堵提供了契机。速度引导具有兼顾效率和安全、治理效果明显等优点,美国交通部在智能交 通发展战略五年规划中,明确提出将动态速度协同作为道路网络交通流优化的重要手段之 一。因此,在异质交通流中实施车速引导成为解决高速公路入口匝道处交通问题的重要手 段。 与此同时,高铁中的闭塞区间控制理论在实时获取列车运行状态的基础上,可以 保证列车整体运行的安全性和机动性,对异质交通流的速度引导具有借鉴意义。智能网联 技术可实现个体车辆的微观控制,为闭塞区间理论在入口匝道处速度引导提供了技术基 础,因此将闭塞区间理论应用到入口匝道处速度引导成为了一条可行途径。 目前入口匝道的速度引导系统和方法大多集中在智能化程度相同的同质交通流, 没有考虑到未来长期会存在智能车、网联车和普通车等异质交通流混行的情况;另一方面, 在闭塞理论道路应用方面,目前方法仍停留在单一方法的应用,存在效率较低和鲁棒性较 差的缺点,在将固定闭塞和移动闭塞等方法组合进行速度引导方面仍有所欠缺。
技术实现要素:
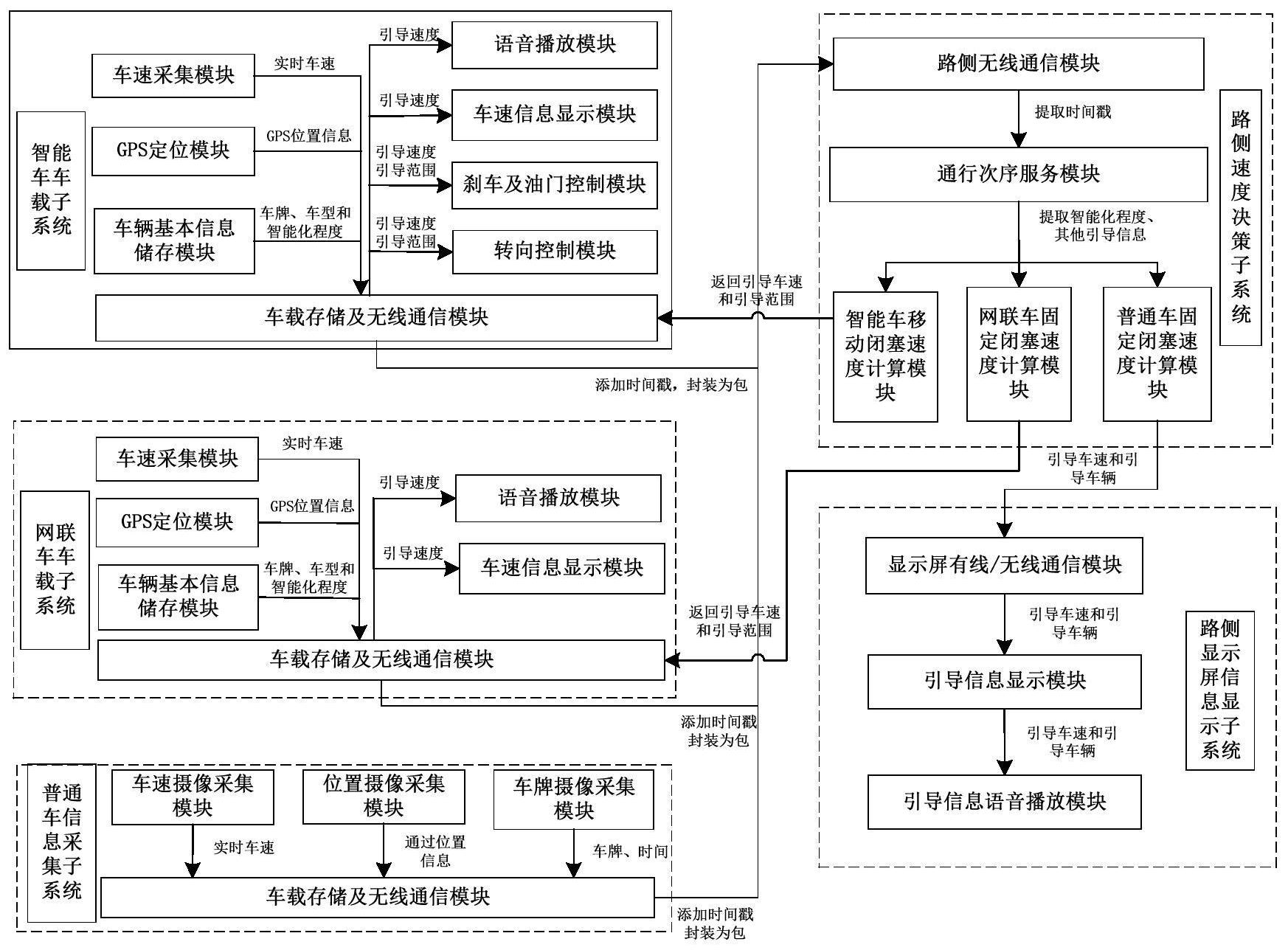
有鉴于此,本发明创造旨在提出一种高速公路入口匝道异质交通流车速引导系统 及引导方法,以解决目前入口匝道的速度引导系统和方法大多集中在智能化程度相同的同 质交通流,没有考虑到未来长期会存在智能车、网联车和普通车等异质交通流混行的问题。 为达到上述目的,本发明创造的技术方案是这样实现的: 一种高速公路入口匝道异质交通流车速引导系统,包括: 用于获取智能车车辆信息的智能车车载子系统,所述智能车车载子系统安装在智 能车上;用于获取网联车车辆信息的网联车车载子系统,所述网联车车载子系统安装在网 联车上;用于获取普通车车辆信息的普通车信息采集子系统,所述普通车信息采集子系统 安装在路侧; 所述智能车车载子系统、网联车车载子系统、普通车信息采集子系统都无线连接 路侧速度决策子系统,所述路侧速度决策子系统依据先后顺序引导车辆,所述路侧决策子 系统还连接路侧显示屏显示子系统。 进一步的,所述智能车车载子系统包括车载存储及无线通信模块,以及与所述车 5 CN 111599194 A 说 明 书 2/9 页 载存储及无线通信模块连接的车速采集模块、GPS定位模块、语音播报模块、车速信息显示 模块、刹车及油门控制模块、转向控制模块、车辆基本信息储存模块; 所述智能车车载子系统通过车载存储及无线通信模块无线连接路侧速度决策子 系统。 进一步的,所述网联车车载子系统包括车载存储及无线通信模块,以及与所述车 载存储及无线通信模块连接的车速采集模块、GPS定位模块、车载无线通信模块、车辆基本 信息储存模块、车速显示模块和语音播报模块; 所述智能车车载子系统通过车载存储及无线通信模块无线连接路侧速度决策子 系统。 进一步的,所述普通车信息采集子系统包括存储及无线通信模块,以及存储及无 线通信模块连接的车牌摄像采集模块、位置摄像采集模块、车速摄像采集模块; 所述普通车信息采集子系统通过存储及无线通信模块连接路侧速度决策子系统。 进一步的,所述路侧速度决策子系统包括路侧无线通信模块、路侧无线通信模块 连接的通行次序服务模块,以及通行次序服务模块连接的智能车移动闭塞速度计算模块、 网联车固定闭塞速度计算模块和普通车固定闭塞速度计算模块。 进一步的,所述路侧显示屏显示子系统包括通信模块以及与通信模块连接的引导 信息显示模块、引导信息语音播放模块; 所述通信模块为无线或者有线通信模块。 一种高速公路入口匝道异质交通流车速引导方法,包括以下步骤: S1、车辆到达路侧速度决策子系统通信范围时,路侧速度决策子系统获取车辆信 息; S2、路侧速度决策子系统接收到发送信息,依据先到先服务的原则分配合流区冲 突点的通行路权,将主路和入口匝道所有车辆的通行次序进行排列; S3、路侧速度决策子系统进行引导速度v的计算; S4、速度计算完成后,速度引导中心将引导信息发送给通信范围内的车辆。 进一步的,所述步骤S1中,路侧速度决策子系统获取车辆信息的方法如下: 智能车和网联车的车载子系统与路侧速度决策子系统进行信息交互,将车辆信息 发送至路侧速度决策子系统,普通车的车辆信息由设置在路侧的普通车信息采集子系统获 取并将车辆信息发送至路侧速度决策子系统。 进一步的,所述步骤S3中,其中针对普通车和网联车采用固定闭塞方法计算引导 速度v,智能车采用移动闭塞方法进行速度计算引导速度v,具体方法如下: 针对智能车,由于其由驾驶机器人控制,速度控制精度较高,因此采用闭塞区间理 论中的移动闭塞控制方法,以通行次序中前车的通过时刻为目标点,根据本车的位置、速度 计算记得本车预计通过时刻,反推得到引导速度; 智能车的预计通过时刻tpass,计算公式如下: 式中,treach为车辆到达路侧决策系统通信范围的时刻,vi为车辆的引导速度,v0为 6 CN 111599194 A 说 明 书 3/9 页 到达通信范围时的速度,a为车辆加速度,x为车辆距离合流区冲突点的距离; 根据移动闭塞控制方法,以前车预计通过时刻为目标点,智能车的预计通过时刻 tpass为: 式中,tpass-f为次序中前车的预计通过时刻,tbrake为车辆最短刹车时间,tsafe为安 全时间裕量。 两式联立,可得加速情况下车辆i的引导速度: 减速情况下车辆i的引导速度为: 其中ti=tpass-f tsafe-treach 对于网联车,车辆由驾驶员进行控制,速度控制精度较低,因此采用固定闭塞控制 方法,以次序中前车的通过时刻为目标点,按照固定长度计算得到本车预计通过时刻和引 导速度; 网联车的预计通过时刻tpass,,计算公式如下: 式中,treaction为驾驶员对速度引导信息的反应时间; 以次序中前车的预计通过时刻为区间一端的端点,以安全车头时距为固定闭塞的 区间长度tf,则本车的预计通过时刻tpass为: tpass=ti-1 tf 两式联立,可得减速情况下车辆i的引导速度: 加速情况下车辆i的引导速度: 其中,T=tpass-f tf-treach-treaction 对于普通车,车辆由驾驶员进行控制,速度控制精度较低,因此同样采用固定闭塞 控制方法,并且采集和发送普通车的信息存在延迟,因此区间长度的计算方法与网联车不 同; 普通车的通过时刻计算公式为: 以次序中前车的预计通过时刻为目标点,固定闭塞的区间长度为安全车头时距和 7 CN 111599194 A 说 明 书 4/9 页 驾驶员阅读显示屏上的引导速度,则本车的预计通过时刻为: tpass=ti-1 tf tread 两式联立,可得减速情况下车辆i的引导速度: 式中,加速情况下车辆i的引导速度: 其中,T=ti-1 tf-treach-tsafe-treaction。 进一步的,所述步骤S4中,引导车辆的方法如下: 引导智能车进行自动驾驶并将引导信息显示给车辆使用者;网联车通过视觉和听 觉将信息通知给驾驶员;同时将普通车的引导信息通过路侧显示屏进行视觉和听觉播报。 相对于现有技术,本发明创造所述的高速公路入口匝道异质交通流车速引导系统 及引导方法具有以下优势: (1)本发明创造所述的高速公路入口匝道异质交通流车速引导系统提供了可以快 速实现高速公路入口匝道车辆引导的引导系统,针对不同车辆利用不同的子系统,有效的 解决了匝道入口处容易出现车辆阻塞的情况。 (2)本发明创造所述的高速公路入口匝道异质交通流车速引导方法针对不同智能 网联程度的车辆采用不同的引导速度计算方法,针对智能网联程度较高的智能车采用更为 高效的移动闭塞速度计算方法。针对普通车和网联车,采用固定闭塞速度计算方法。所提出 的系统和方法通过针对个体车辆进行车速引导,可有效降低合流区碰撞风险和提高通行效 率。同时,由于其针对异质交通流环境并采用组合闭塞区间控制方法,所以具有实用性强、 适用期长和鲁棒性高的特点。 附图说明 构成本发明创造的一部分的附图用来提供对本发明创造的进一步理解,本发明创 造的示意性实施例及其说明用于解释本发明创造,并不构成对本发明创造的不当限定。在 附图中: 图1为闭塞区间理论的原理示意图; 图2为本发明创造智能网联环境下高速公路入口匝道异质交通流车速引导系统的 结构框图; 图3为本发明创造智能网联环境下高速公路入口匝道异质交通流车速引导系统的 场景示意图; 图4为本发明创造智能网联环境下高速公路入口匝道异质交通流车速引导系统的 逻辑流程图。











