
技术摘要:
本发明涉及一种借助于用于制动系统的行程检测装置进行行程检测的方法,其中,行程检测装置具有第一磁性角度传感器(13),以下步骤(20)被执行:借助于第一角度传感器(13)确定在第一方向上的第一场强和确定在第二方向上的第二场强,其中,行程检测装置具有第二磁性角度传 全部
背景技术:
在现有技术中已知用于检测制动杆的操纵行程的行程传感器,所述行程传感器被 集成到制动控制器中并且通常基于感应原理或基于磁性角度传感器的原理。 根据感应原理的传感器的缺点是,传感器必须总是比待测量的行程的长度更长, 并且传感器在使用卷绕变压器时昂贵且制造复杂。 在基于磁性角度传感器的原理的传感器中,在现有技术中已知使用二维霍尔传感 器。这些传感器分别测量在X方向和Y方向上的场强并且由此能够测量360°的角度。相比之 下,一维霍尔传感器被限制为180°的角度。场角可以借助于反正切由X方向和Z方向的场强 计算出。 这两种原理的缺点在于,它们针对磁性干扰场不够稳健/鲁棒性不够。
技术实现要素:
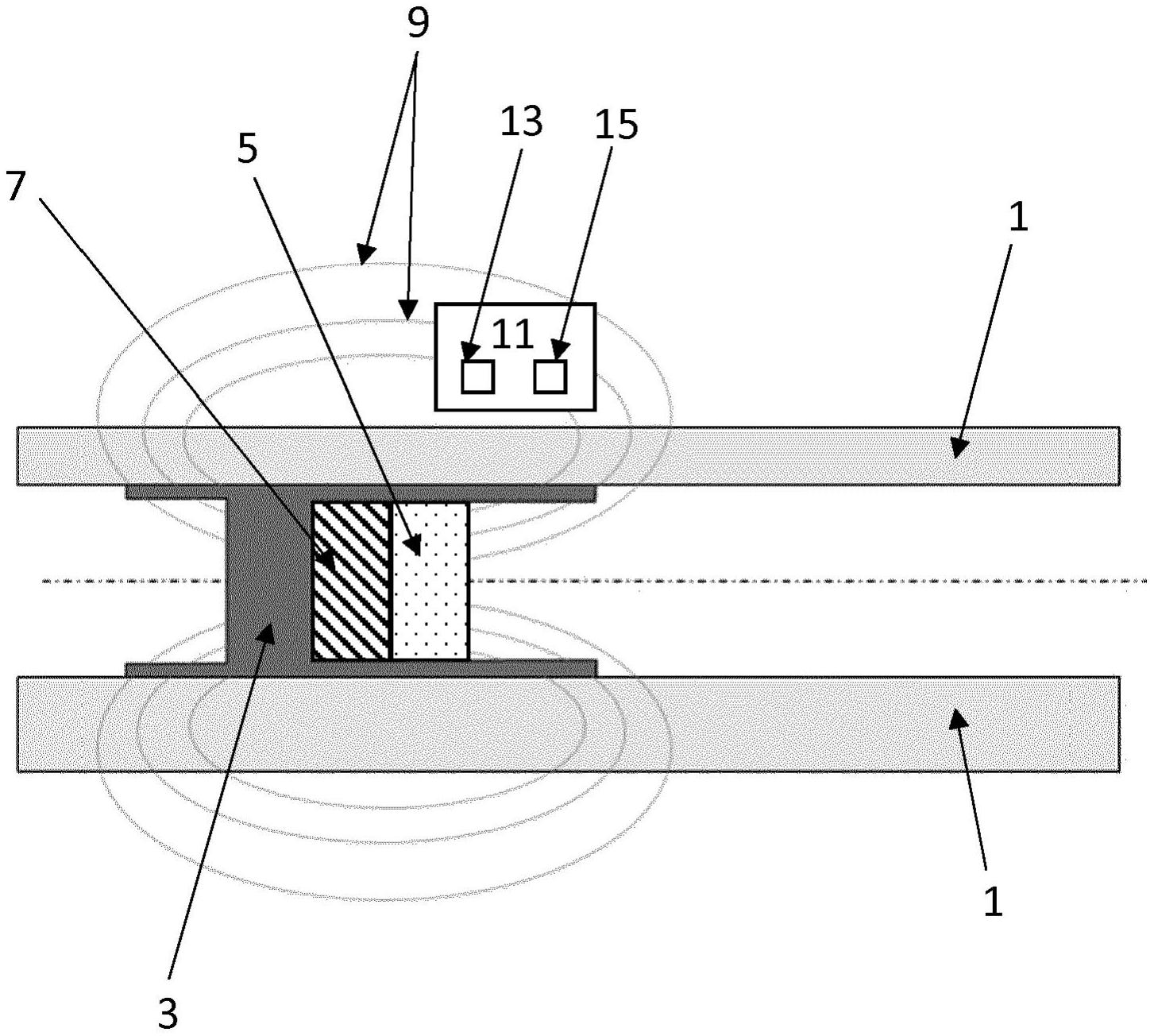
因此,本发明的目的是提供一种行程检测装置,其具有针对磁性干扰场的改善的 鲁棒性。 该目的通过独立权利要求来实现。 本发明涉及一种用于借助于行程检测装置进行行程检测的方法,其中,行程检测 装置具有第一磁性角度传感器,以下步骤被执行: -借助于第一角度传感器确定在第一方向上的第一场强和确定在第二方向上的第 二场强, 其中,所述行程检测装置具有第二磁性角度传感器,该第二磁性角度传感器与第 一角度传感器以预先确定的间距布置,以下步骤被执行: -借助于第二角度传感器确定在第一方向上的第一场强和确定在第二方向上的第 二场强。 通过本发明能够有利地确定无干扰的或者几乎无干扰的信号,从而改善行程检测 装置相对于干扰场的鲁棒性。另一个优点是,传感装置可以被相对简单地更换并且带来较 低的成本。 优选地,与制动操纵杆连接的永磁体产生磁场,该磁场的场矢量与磁体位置有关。 角度传感器特别优选地设计为2D霍尔传感器。因此,传感器分别测量在X方向上的场强(第 一方向的第一场强)和Z方向上的场强(第二方向的第二场强)。 在本发明的一个优选的改进方案中,执行多个步骤以确定无干扰的信号。为此,通 过生成第一角度传感器的第一场强与第二角度传感器的第一场强之间的差来计算第一场 3 CN 111602031 A 说 明 书 2/3 页 强差。换句话说,确定在第一角度传感器的第一场强与第二角度传感器的第一场强之间的 差,该差被定义为第一场强差。 此外,通过生成第一角度传感器的第二场强与第二角度传感器的第二场强之间的 差来计算第二场强差。换句话说,确定在第一角度传感器的第二场强与第二角度传感器的 第二场强之间的差,该差被定义为第二场强差。 在本发明的一个优选的改进方案中,随后借助于反正切函数由第一场强差和第二 场强差计算出场角。 因为两个角度传感器定位成彼此相距特定的、特别是固定的距离,所以两个传感 器测量不同的场角。如果出现足够均匀的磁性干扰场,则两个传感器的在X方向(第一方向) 和Z方向(第二方向)上的场强被相同地影响。通过生成第一场强之间和第二场强之间的差 来消除干扰信号。有利地,然后通过将反正切函数应用到第一场强差和第二场强差上,得到 未受干扰的、与行程成比例的输出信号。 本发明还涉及一种行程检测装置,其优选地布置在制动系统中。行程检测装置包 括第一角度传感器,该第一角度传感器具有用于检测在第一方向上的第一场强的第一检测 元件和用于检测在第二方向上的第二场强的第二检测元件,其中,行程检测装置还包括第 二角度传感器,该第二角度传感器具有用于检测在第一方向上的第一场强的第一检测元件 和用于检测在第二方向上的第二场强的第二检测元件。因此,两个角度传感器中的每一个 具有第一检测元件和第二检测元件,其中,检测元件优选地设计为霍尔元件。因此,角度传 感器中的每一个优选地设计为2D霍尔传感器。 在所述行程检测装置的一种优选的改进方案中,该行程检测装置具有计算单元, 借助于该计算单元能计算第一角度传感器的第一场强与第二角度传感器的第一场强之间 的第一场强差。此外,同样可以计算第一角度传感器的第二场强与第二角度传感器的第二 场强之间的第二场强差。 在本发明的一种优选的改进方案中,借助于计算单元能通过使用反正切而由第一 场强差和第二场强差计算出场角。 在本发明的一种优选的改进方案中,角度传感器被集成到制动缸中。 此外,本发明涉及一种具有所述的行程检测装置的制动系统、一种具有这种制动 系统的机动车以及一种所述方法和所述行程检测装置在制动系统中的应用。 附图说明 其它优选的实施方式也由从属权利要求和以下根据附图对实施例的描述得出。 在示意图中示例性地示出: 图1示出根据本发明的行程检测装置或根据本发明的行程检测装置的部件,以及 图2示出用于行程检测的根据本发明的方法的流程图。











