
技术摘要:
本发明涉及一种用于直流无刷电机的转子位置确定方法及系统。该方法包括:获取转子位置检测频率阈值;在起动过程中,以电流调节器输出的开环角度值为空间矢量脉宽调制SVPWM模块的输入,利用正弦波脉宽调制SPWM调制方式对当前频率进行I/F升频控制,确定升频后的频率;当 全部
背景技术:
相对于传统的有刷电机,直流无刷电机具有寿命长、调速范围宽,功率密度大、效 果率高等优点,传统的直流无刷电机控制中需要安装位置传感器来为直流无刷电机的换相 控制提供实时的转子位置信息,不但增加成本且容易损坏,因此近年来学校、科研机构和科 技公司对直流无刷电机的无位置传感器控制技术进行了不断深入的研究与实践。 传统的直流无刷无位置传感器一般采用三段式起动方式与反电动势过零点检测 的二二导通控制方案,由于起动阶段是利用方波VF开环控制,所以起动时转矩脉动大,导致 在起动阶段电机的振动和噪声均很大;而且如果VF参数设置不合理将会导致起动阶段电流 过大触发过流保护或是电流偏小导致起动阶段失步。
技术实现要素:
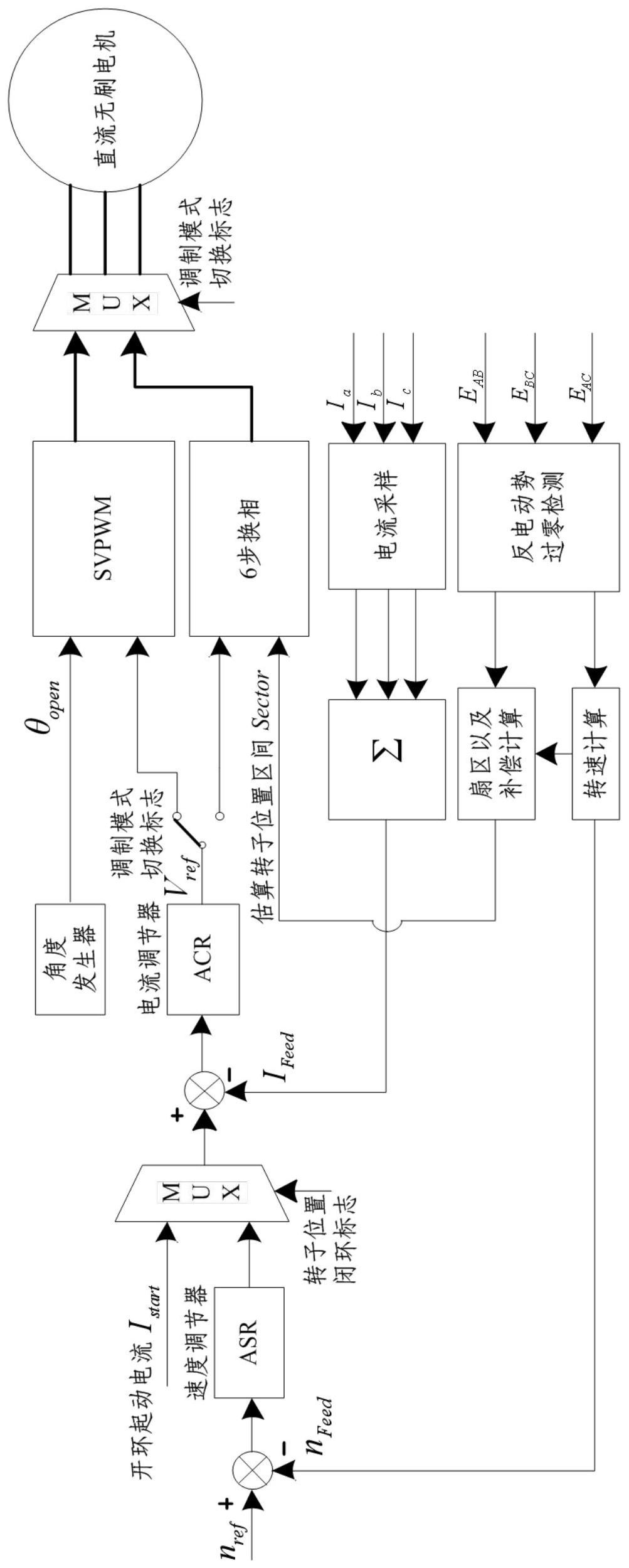
本发明的目的是提供一种用于直流无刷电机的转子位置确定方法及系统,以解决 传统的直流无刷无位置传感器在起动阶段电机的振动和噪声大,且电流不可控导致起动阶 段失步的问题。 为实现上述目的,本发明提供了如下方案: 一种用于直流无刷电机的转子位置确定方法,包括: 获取转子位置检测频率阈值; 在起动过程中,以电流调节器输出的开环角度值为空间矢量脉宽调制SVPWM模块 的输入,利用正弦波脉宽调制SPWM调制方式对当前频率进行I/F升频控制,确定升频后的频 率; 当所述升频后的频率达到所述转子位置检测频率阈值,进入开环控制模式,以所 述升频后的频率持续运行,利用反电动势检测电路采集电机端电压; 根据所述电机端电压确定三相互差120°相位的方波信号; 根据所述方波信号确定直流无刷电机的转子位置。 可选的,所述根据所述电机端电压确定三相互差120°相位的方波信号,具体包括: 利用分压电阻对所述电机端电压进行分压,确定分压后的电机端电压; 利用比较器对所述分压后的电机端电压进行零点比较,确定三相互差120°相位的 方波信号。 可选的,所述根据所述方波信号确定转子位置,之后还包括: 判断在一段时间间隔内是否检测到转子位置,得到第一判断结果; 若所述第一判断结果为在一段时间间隔内检测到转子位置,判断是否连续检测到 超过20个正确的转子位置,若是,确定转子位置检测通过; 4 CN 111555671 A 说 明 书 2/6 页 判断是否连续检测到超过10个错误的转子位置,若是,确定转子位置检测故障; 若所述第一判断结果为在一段时间间隔内未检测到转子位置,确定转子位置检测 超时。 可选的,所述确定转子位置检测通过,之后还包括: 获取所述反电动势检测电路的时间常数; 根据所述升频后的频率以及所述时间常数确定当前滞后角度; 将所述当前滞后角度转化为延迟时间; 根据所述延迟时间对所述转子位置进行补偿,确定补偿后的转子位置。 可选的,所述根据所述延迟时间对所述转子位置进行补偿,确定补偿后的转子位 置,之后还包括: 根据所述补偿后的转子位置将所述开环控制模式切换至转子位置闭环控制模式。 一种用于直流无刷电机的转子位置确定系统,包括: 转子位置检测频率阈值获取模块,用于获取转子位置检测频率阈值; SVPWM模块,用于在起动过程中,以电流调节器输出的开环角度值为空间矢量脉宽 调制SVPWM模块的输入,利用正弦波脉宽调制SPWM调制方式对当前频率进行I/F升频控制, 确定升频后的频率; 反电动势检测模块,用于当所述升频后的频率达到所述转子位置检测频率阈值, 进入开环控制模式,以所述升频后的频率持续运行,利用反电动势检测电路采集电机端电 压; 方波信号确定模块,用于根据所述电机端电压确定三相互差120°相位的方波信 号; 转子位置确定模块,用于根据所述方波信号确定直流无刷电机的转子位置。 可选的,所述方波信号确定模块,具体包括: 分压单元,用于利用分压电阻对所述电机端电压进行分压,确定分压后的电机端 电压; 方波信号确定单元,用于利用比较器对所述分压后的电机端电压进行零点比较, 确定三相互差120°相位的方波信号。 可选的,还包括: 第一判断模块,用于判断在一段时间间隔内是否检测到转子位置,得到第一判断 结果; 转子位置检测通过确定模块,用于若所述第一判断结果为在一段时间间隔内检测 到转子位置,判断是否连续检测到超过20个正确的转子位置,若是,确定转子位置检测通 过; 转子位置检测故障确定模块,用于判断是否连续检测到超过10个错误的转子位 置,若是,确定转子位置检测故障; 转子位置检测超时确定模块,用于若所述第一判断结果为在一段时间间隔内未检 测到转子位置,确定转子位置检测超时。 可选的,还包括: 时间常数获取模块,用于获取所述反电动势检测电路的时间常数; 5 CN 111555671 A 说 明 书 3/6 页 当前滞后角度确定模块,用于根据所述升频后的频率以及所述时间常数确定当前 滞后角度; 转化模块,用于将所述当前滞后角度转化为延迟时间; 补偿模块,用于根据所述延迟时间对所述转子位置进行补偿,确定补偿后的转子 位置。 可选的,还包括: 模式切换模块,用于根据所述补偿后的转子位置将所述开环控制模式切换至转子 位置闭环控制模式。 根据本发明提供的具体实施例,本发明公开了以下技术效果:传统模式采用VF(压 频比)开环起动,起动过程电流不可控,从而导致电流过大的问题,本发明提供了一种用于 直流无刷电机的转子位置确定方法及系统,采用SPWM或是SVPWM调制方式和I/F(电流频率 比)控制方式的结合用于直流无刷电机无位置传感器的开环起动,利用正弦波电流频率起 动,起动电流可以通过参数设置,电流可控制,有效的避免了起动过程中的电流过流或电流 偏小的问题; 同时,由于传统三段式与反电动势过零点检测的二二导通控制方案中采用方波调 制方式,方波调制转矩脉动大,会造成起动过程振动大,噪声高,本发明在起动过程中采用 的是正弦波调制方式,转矩脉动更小,相应的起动时的振动和噪声也会更小。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明所提供的用于直流无刷电机的转子位置确定方法流程图; 图2为本发明所提供的控制方案框图; 图3为本发明所提供的整个控制系统的起动与切换过程图; 图4为本发明所提供的用于直流无刷电机的转子位置确定系统结构图。











