
技术摘要:
本发明提出了一种海洋矿物输送软管空间形态的稳定装置,涉及海洋采矿设备技术领域,该稳定装置包括:信号监听器、动力装置、控制器;其中,信号监听器用于监听第一信号和第二信号,并根据第一信号确定矿物收集点的位置,根据第二信号确定海底采矿机的位置;动力装置用 全部
背景技术:
由于深海矿区海洋环境复杂多变,海洋采矿系统作业时收到海浪、洋流和腐蚀等 恶劣条件的影响,因此,深海采矿系统的安全性和稳定性是工程设计和应用的核心。海洋采 矿系统中,矿物输送软管的空间结构稳定性保障至关重要,然而在复杂深海作业中,存在着 横向、竖向、纵向等多个方向的外力,使软管构型发生三维空间的变形,破坏原有的稳定,影 响输送作业。现有技术中通过在软管上安装浮力装置来保持软管形态,例如,中国专利 CN201310640663.5公开了一种海洋矿产资源开采装置及开采方法,该专利文献中涉及有用 于输送矿物的软管,软管上安装有由浮力材料制成的浮体一,以用于保持软管的形态。现有 的浮力装置只能提供单一浮力,难以保证软管形态的稳定。
技术实现要素:
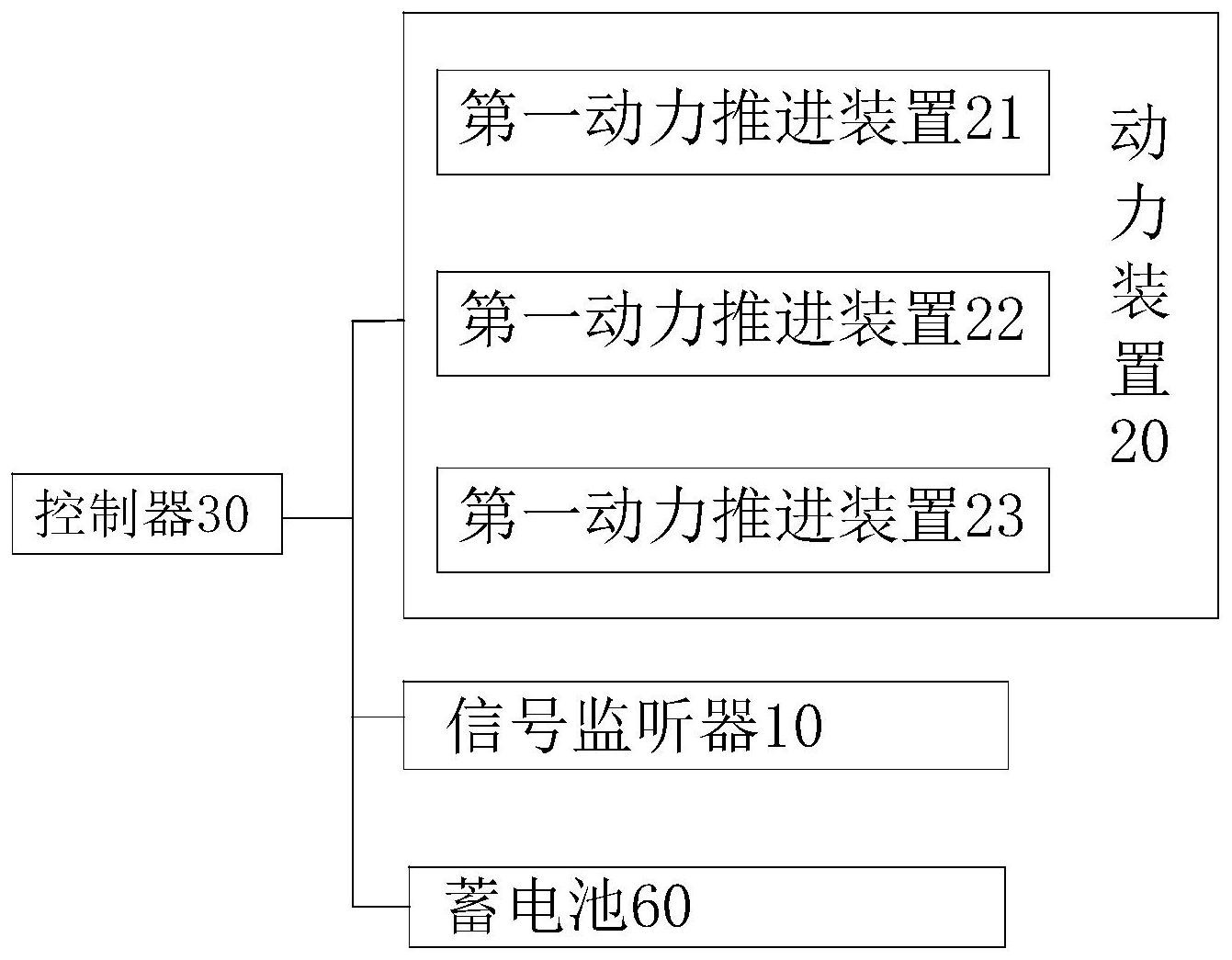
本申请所要解决的技术问题在于,针对现有技术的上述不足,提出一种海洋矿物 输送软管空间形态的稳定装置,该稳定装置能够提高了海洋矿物输送过程中矿物输送软管 空间形态的稳定性。 该海洋矿物输送软管用于输送海底采矿机所采集的矿物至矿物收集点,矿物收集 点上设置有用于产生第一信号的第一信号锚点,海底采矿机上设置有用于产生第二信号的 第二信号锚点;该稳定装置连接在矿物输送软管上的预定位置,并包括: 信号监听器,其用于监听第一信号和第二信号,并根据第一信号确定矿物收集点 的位置,根据第二信号确定海底采矿机的位置; 动力装置,其用于产生推进动力以进行位置调节; 控制器,其用于从信号监听器获取矿物收集点和海底采矿机的位置信息,并根据 其与矿物收集点和海底采矿机的相对位置,控制动力装置来调节稳定装置的位置,使矿物 输送软管保持预设的空间形态。 进一步地,动力装置具体包括:设置在第一方向上的第一动力推进装置、设置在第 二方向上的第二动力推进装置、设置在第三方向上的第三动力推进装置,其中,第一方向、 第二方向、第三方向之间相互垂直,且第一方向设定为竖直方向。 进一步地,第一动力推进装置、第二动力推进装置、第三动力推进装置具体为螺旋 桨装置。 进一步地,稳定装置还包括:可调节浮力大小的浮力舱。 进一步地,该稳定装置还包括:连接组件,其包括:可固定地套设在矿物输送软管 上的软管套、与软管套连接在一起的绳索。 进一步地,矿物输送软管的空间形态包括:单拱形、多拱形。 3 CN 111577285 A 说 明 书 2/5 页 进一步地,控制器还用于根据矿物收集点的位置和海底采矿机的位置来确定矿物 收集点与海底采矿机之间的距离;当矿物收集点与海底采矿机之间的距离小于阈值时,控 制器控制动力装置调节稳定装置的位置使矿物输送软管保持在单拱形;当矿物收集点与海 底采矿机之间的距离大于阈值时,控制器控制动力装置调节稳定装置的位置使矿物输送软 管保持在多拱形。 进一步地,信号监听器还用于接收矿物收集点发送的第一指令信号;控制器响应 于信号监听器接收到矿物收集点发送的第一指令信号,控制动力装置调节稳定装置的位 置,使矿物输送软管从第一空间形态切换到第二空间形态并保持在第二空间形态。 进一步地,信号监听器还用于接收矿物收集点在检测到矿物输送软管发生堵塞时 发出的第二指令信号;控制器响应于信号监听器接收到第二指令信号,控制动力装置驱动 稳定装置按预设轨迹运动,以动态调整矿物输送软管。 进一步地,矿物收集点为采矿船或水下集矿仓。 在以上方案中,矿物收集点与海底采矿机之间通过矿物输送软管连接,稳定装置 连接在矿物输送软管上的预定位置,稳定装置能够根据采矿船的位置和海底采矿机的位置 来调节自身位置,使矿物输送软管保持预设的空间形态,提高了海洋矿物输送过程中矿物 输送软管空间形态的稳定性。 附图说明 图1是本申请实施例中一种海洋矿物输送软管空间形态的稳定装置的应用场景示 意图。 图2是本申请实施例中一种海洋矿物输送软管空间形态的稳定装置的另一应用场 景示意图。 图3是本申请实施例中稳定装置的示意框图。 图4是本申请实施例中稳定装置的结构示意图。 图5是本申请实施例中稳定装置的内部结构示意图。 图6是本申请实施例中稳定装置的另一结构示意图。











