
技术摘要:
本发明公开了一种光路系统及激光雷达,光路系统将N个同步光线射入旋转多面体棱镜,经旋转多面体棱镜形成N个扫描光,扫描光经固定多面体棱镜反射后形成N个同步从圆心向外方向射出的垂直方向扫描光,相对于单光源将提高N倍刷新率,在保持1/N的刷新率时则相应增加每个水平 全部
背景技术:
在自动驾驶等领域中,激光雷达的水平分辨率、垂直分辨率和刷新率越高,对自动 驾驶的安全性就越好。现有技术中的激光雷达,主要分为两大类,第一类为旋转式多线激光 雷达,第二类为非旋转式激光雷达即固态激光雷达。 第一类采用机械旋转方式实现三维扫描可以满足无人驾驶对0.1°水平分辨率 (360°)、0.2-0.3°垂直分辨率(上下15°)及10-20帧刷新频率的技术要求,但在垂直方向上 分辨率和激光发射器和接收器数量成正比,例如在垂直方向上30°视场内要细分128份,则 需要128个激光发射器和128个接收器,且量产过程中必须对每个发射器和接收器进行标 定,人力投入大,产品良率低。因此现有技术中的使用多个激光器的机械旋转式激光雷达成 本很高。 第二类固态激光雷达有三种,第一种为MEMS(微机电系统)方案,采用微型MEMS扫 描镜来控制激光束;另一种采用称为光学相控阵的技术来控制激光束,而无需任何运动部 件;第三种则被称为泛光(Flash)成像LiDAR,无需光束转向,只需一次闪光即可照明整个场 景,再通过类似于数码相机的二维阵列图像传感器探测反射回来的光线。但第二类固态激 光雷达只能扫描一个方向,无法360°扫描,必须多个这样的固态雷达配合才能达到第一类 激光雷达的效果,且只有第一类技术比较成熟,所以成本也无法大幅下降及量产。 发明专利CN107153185A公开了一种激光雷达及激光雷达控制方法,采用垂直振镜 和水平旋转结构配合完成三维扫描,采用一个发射器通过振镜实现垂直方向扫描,代替多 个发射器以求降低成本及结构的复杂性,但由于无人驾驶对激光雷达水平分辨率要求0.1° 及刷新频率10帧或以上,并且测量距离要达到200m,根据这技术要求水平方向每扫过0.1° 的时间为27μs,而每一次测量时间至少2μs,在垂直方向上只能测量13次,即垂直分辨率只 能做到2.2°,所以达不到第一种多发射器/接收器激光雷达的技术参数要求,无法完全替代 上述的第一类激光雷达。
技术实现要素:
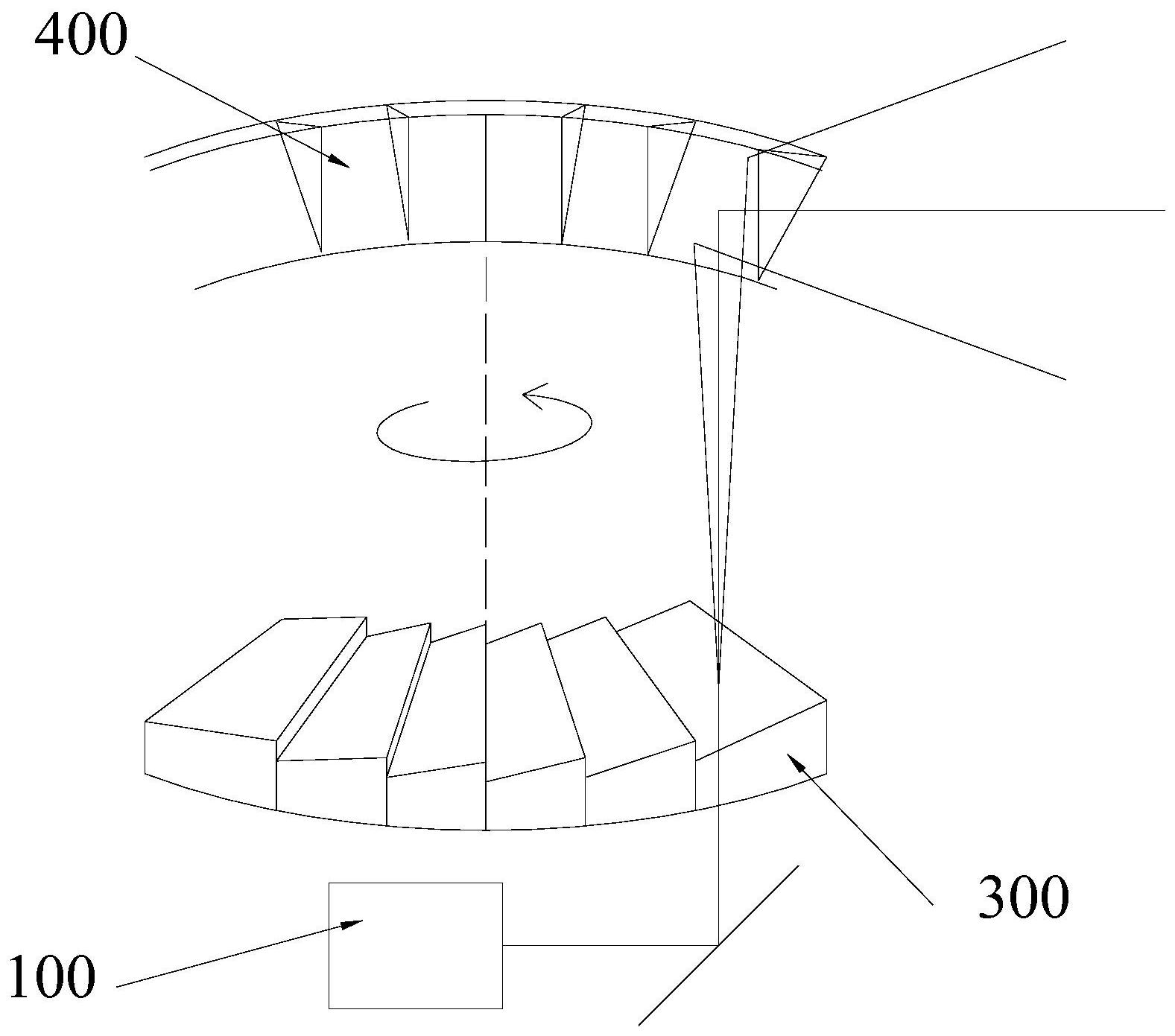
本发明的目的在于提供一种提高垂直方向分辨率的光路系统。 本发明还提供一种包含此光路系统的激光雷达。 本发明所采取的技术方案是: 根据本发明第一方面实施例的光路系统,其包括N个以圆周等分方式同步发光光 源、旋转多面体棱镜和固定多面体棱镜,光线射入旋转多面体棱镜,经过所述旋转多面体棱 镜反射或折射后形成扫描光,所述扫描光经所述固定多面体棱镜反射形成N个同步从圆心 向外方向射出的垂直方向扫描光。 本发明的有益效果:此光路系统,N个同步光线射入旋转多面体棱镜,经过旋转多 3 CN 111551913 A 说 明 书 2/4 页 面体棱镜形成N个扫描光,扫描光经固定多面体棱镜反射后形成N个同步从圆心向外方向射 出的垂直方向扫描光,相对于一个光源时的刷新率将提高N倍刷新率,在保持1/N的刷新率 时则相应增加每个水平角度扫描时长,提高水平扫描角内的垂直方向扫描时间,倍数级提 高垂直方向上的分辨率。 进一步作为本发明技术方案的改进,所述旋转多面体棱镜为圆形,所述旋转多面 体棱镜由N个第一反射面组成,各所述第一反射面与水平方向成45°夹角设置,所述固定多 面体棱镜由第二反射面和第三反射面组成,所述第二反射面与水平方向成45°夹角并与第 一反射面按水平方向旋转90°设置,所述第三反射面垂直设置并与经第二反射面反射出的 光路成45°角设置,光线经所述旋转多面体棱镜反射后形成N个同步、扫描角为360°/N的扫 描光。 进一步作为本发明技术方案的改进,所述旋转多面体棱镜由N个楔形棱镜阵列成 圆形,所述固定多面体棱镜的每一面与旋转多面体棱镜的各楔形棱镜面对应设置,光线经 所述旋转多面体棱镜折射形成N个同步、扫描角为360°/N的扫描光。 一种激光雷达,其包括至少两个用于发射探测激光的激光发射器、如前面所述的 光路系统、水平旋转结构、电机控制模组,所述光路系统用于将至少两个点光源形成以圆周 等分方式从圆心向外射出的垂直方向扫描光,所述旋转多面体棱镜、固定多面体棱镜以及 激光发射器均安装在所述水平旋转结构上,所述电机控制模组包括一号电机控制模组和二 号电机控制模组,所述一号电机控制模组驱动旋转多面体棱镜旋转,所述二号电机控制模 组驱动水平旋转结构运动。 此激光雷达,包括N个激光发射器、光路系统、水平旋转结构、电机控制模组,通过N 个激光发射器发出的激光经光路系统发出垂直方向扫描光,在刷新率为1/N的情况下可以 减低旋转速度,增加每个水平角度扫描时长,从而提高该水平扫描角内的垂直方向扫描时 间,倍数级的提高垂直方向上分辨率,降低激光雷达的成本以及标定工作,提高激光雷达的 垂直分辨率,达到多路发射器的多线激光雷达的技术参数要求,通过电机控制模组带动水 平旋转结构旋转,从而带动激光发射器、旋转多面体棱镜同步旋转,从而实现360°的三维扫 描。 进一步作为本发明技术方案的改进,所述激光发射器以圆周等分方式设置。 进一步作为本发明技术方案的改进,所述一号电机控制模组和二号电机控制模组 上均安装有用于确定激光在水平及垂直方向上的发射角度的码盘。 进一步作为本发明技术方案的改进,还包括接收器,所述接收器与激光发射器数 量相等,所述接收器等间隔安装在一壳体内。 进一步作为本发明技术方案的改进,还包括聚焦单元,所述聚焦单元设置在接收 器之前,所述聚焦单元聚焦反射激光到接收器。 进一步作为本发明技术方案的改进,所述接收器为APD或SIPM传感器。 进一步作为本发明技术方案的改进,还包括准直单元,所述准直单元设置在所述 激光发射器和旋转多面体棱镜之间,所述准直单元用于准直所述激光发射器发射的出射激 光。 4 CN 111551913 A 说 明 书 3/4 页 附图说明 下面结合附图对本发明作进一步说明: 图1为本发明光路系统实施例2示意图; 图2为本发明含有光路系统实施例2的激光雷达俯视图; 图3为本发明含有光路系统实施例2的激光雷达主视图; 图4为本发明光路系统实施例1示意图; 图5为本发明含有光路系统实施例1的激光雷达俯视图 图6为本发明含有光路系统实施例1的激光雷达俯视图。











