
技术摘要:
本发明提出基于状态观测器的接触器磁链闭环控制方法,所述控制方法在接触器起动过程及接触器保持过程中,通过磁链状态观测器观测接触器的磁链数据,并以观测结果对接触器电流进行控制;本发明采用磁链外环控制电流内环的双闭环控制结构,不仅克服了单独电流闭环保持过 全部
背景技术:
接触器作为一种常见的电磁开关在工业系统和配电系统中用量十分庞大,其性能 指标直接影响到整个控制系统的安全和稳定。传统接触器在运行中存在诸多问题,如:对电 压跌落较为敏感,容易受到电网电压波动影响引起触头误分断,影响接触器在石油等连续 生产系统中的运行可靠性;工作电压范围较窄,在临界吸合电压下铁心会产生持续的振动, 导致触头熔焊;存在频繁操作下接触器线圈温升过高,影响线圈寿命以及接触器性能。 近年来国内外学者提出了各种接触器智能控制方案,对比目前的控制方案,对接 触器线圈电流进行直接闭环控制具有如下优点:直接以线圈电流作为反馈控制量,具有自 然限流的特点,尤其应用在线圈电阻较小的大容量接触器时,可以灵活调节起动激磁安匝, 避免线圈过流及短路;在起动过程中通过灵活调节起动电流曲线可以实现起动过程的优化 控制;线圈电流始终连续可控,不会出现电流突然截断的情况,避免线圈操作过电压。电流 闭环虽有诸多优点,但在保持过程中却存在重大缺陷:在进行节能无声保持时,一旦受到外 界振动或冲击的影响,导致动静铁心间气隙突然微增时,线圈保持电流会被迫上升,大于保 持参考电流,此时电流闭环进入“恶性循环”,迅速将保持电流占空比调节为0,反而加剧接 触器的分断,严重影响智能接触器在机车、船舶等恶劣应用环境下的保持可靠性。 鉴于接触器电流闭环控制的缺陷,本发明提出了磁链闭环控制,在起动及保持过 程中构建磁链状态观测器观测磁链值,之后采用磁链外环控制电流内环的双闭环控制结 构,不仅克服了单独电流闭环保持过程的缺陷,同时也进一步提高了接触器起动过程优化 控制的灵活性。
技术实现要素:
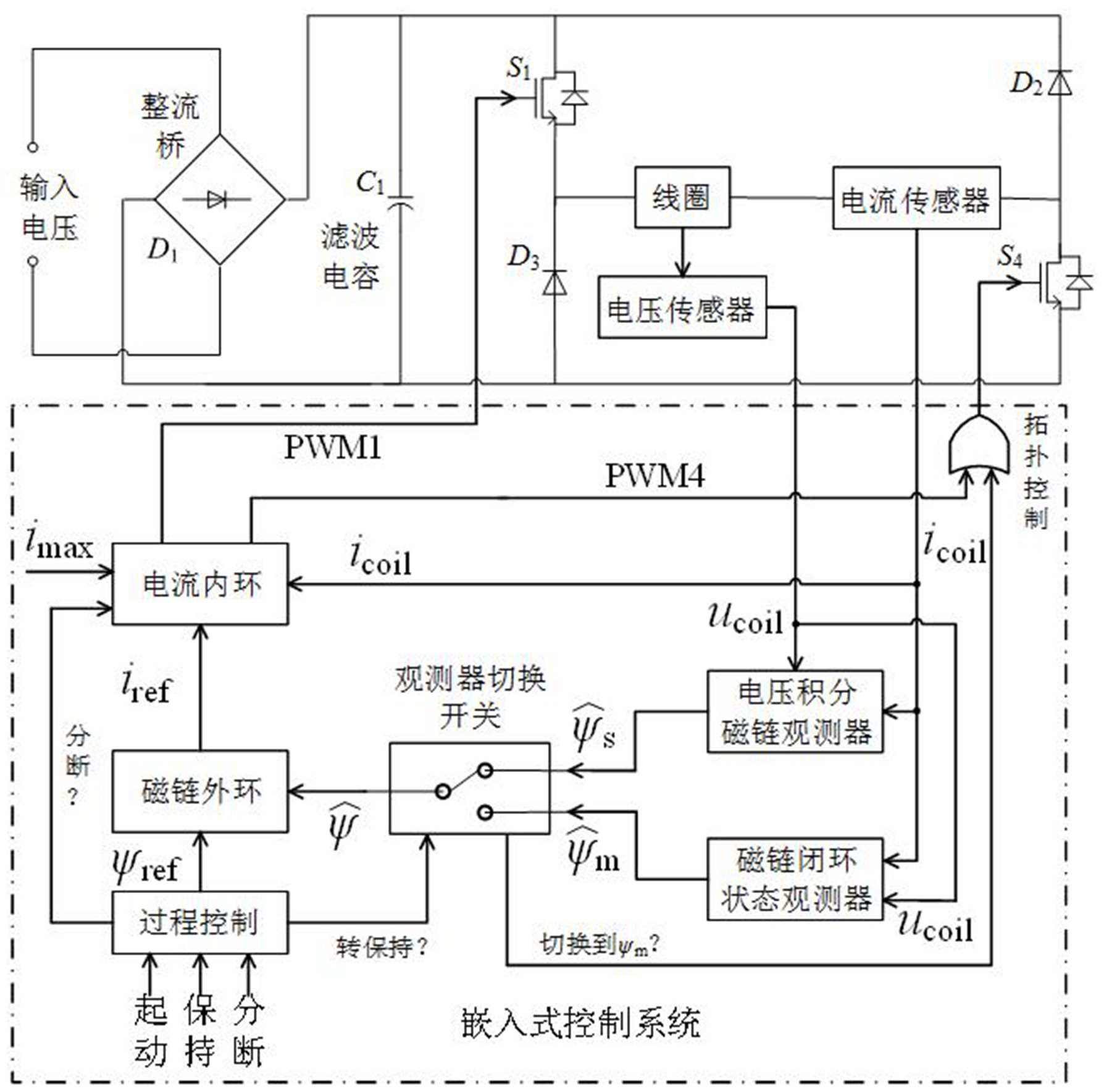
本发明提出基于状态观测器的接触器磁链闭环控制方法,采用磁链外环控制电流 内环的双闭环控制结构,不仅克服了单独电流闭环保持过程的缺陷,同时也进一步提高了 接触器起动过程优化控制的灵活性。 本发明采用以下技术方案。 基于状态观测器的接触器磁链闭环控制方法,所述控制方法在接触器起动过程及 接触器保持过程中,通过磁链状态观测器观测接触器的磁链数据,并以观测结果对接触器 电流进行控制。 在接触器起动过程中,磁链状态观测器采用基于电压积分磁链观测器的开环观测 方法得到磁链数据;在稳定的接触器保持过程中,磁链状态观测器采用基于磁链闭环状态 观测器的闭环观测方法来获得磁链数据;在控制方法中,所述开环观测方法、闭环观测方法 根据接触器控制过程的进度平稳切换;在控制方法中,通过对接触器线圈电流的控制,来控 5 CN 111580436 A 说 明 书 2/7 页 制接触器线圈的激磁状态,以对接触器的动态工作进行优化控制。 所述接触器起动时间小于100ms;在针对接触器起动过程的开环观测方法中,采用 公式(1)计算磁链的数据; 公式(1)中,通过检测线圈电压ucoil、线圈电流icoil后结合接触器线圈电阻Rcoil进 行积分计算即可得到起动过程磁链的数据ψ;t0为接触器起动时刻,ψ,ucoil,icoil在t0时刻的 初始状态皆为0;起动磁链可记为 在针对稳定的接触器保持过程的闭环观测方法中,接触器线圈磁路的磁链满足如 下公式(2): ψ=Licoil (2) 接触器的磁路电压平衡方程以公式(3)表述为: 结合公式(2)、公式(3),推导得公式(4) 公式(4)中,把接触器稳定保持过程的线圈磁路视为恒定的阻感负载来计算;ucoil 为线圈电流,Rcoil为线圈电阻,ψ为磁路磁链,L为磁路电感; 推导得到接触器稳定保持过程的状态空间表达式 式中: 为磁链的微分。 在接触器稳定保持过程的状态空间表达式中,以ucoil作为输入,icoil作为输出,以ψ 作为状态变量,可视同一个A=-Rcoil/L、B=1、C=1/L的单输入单输出的一维线性定常系 统,并以此一维线性定常系统进行实时求解应用,利用输入变量及输出变量来构建应用于 接触器稳定保持过程的闭环的磁链状态观测器; 所述应用于接触器稳定保持过程的闭环的磁链状态观测器利用系统输出参量 icoil,采用线圈电流观测值 与实际值icoil的误差来闭环修正状态变量观测值 以改善观 测器的性能。 所述应用于接触器稳定保持过程的磁链闭环状态观测器,以实测的ucoil、icoil为观 测器输入,在开环状态观测器的基础上增加反馈矩阵E,以 与icoil的误差为输入,对保持 6 CN 111580436 A 说 明 书 3/7 页 过程中的观测磁链 进行闭环修正,使 能够迅速趋近实际值。 所述接触器磁链闭环控制方法使用的装置包括线圈驱动电路和嵌入式控制系统; 所述线圈驱动电路包括整流桥D1、为滤波电容C1的整流模块;所述整流模块与输入 电源相接,将输入电压变为较为平稳的直流电压输出至接触器线圈,使接触器线圈工作; 线圈驱动电路还包括电子开关S1、S4,还包括快恢复二极管D2、D3;所述电子开关对 整流滤波后的直流电压进行PWM控制,以控制对接触器线圈施加的电压极性; 所述线圈驱动电路通过控制对接触器线圈施加的电压极性,使接触器线圈电路工 作于 1态、-1态和0态; 当接触器线圈电路工作于 1态时,S1、S4同时导通,整流滤波后的正向电压施加在 线圈两端,使接触器线圈电流快速上升,磁链快速加强; 当接触器线圈电路工作于-1态时,此时线圈电流不为零,S1、S4同时关断,线圈电流 通过D2、D3向滤波电容C1回馈能量,电容的负向电压施加在线圈两端,迫使线圈快速退磁; 当接触器线圈电路工作于0态时,线圈两端承受负的D3及S4管压降接近0V,电子开 关仅有S4导通,线圈电流通过D3、S4续流,线圈电流缓慢下降; 所述嵌入式控制系统通过电流传感器检测接触器线圈电流,通过电压传感器检测 接触器线圈电压。 所述嵌入式控制系统包括过程控制模块、拓扑控制模块和观测器切换开关,还包 括采用滞环控制原理的磁链外环控制模块和采用滞环控制原理的电流内环控制模块;过程 控制模块与磁链外环控制模块相连;磁链外环控制模块与电流内环控制模块相连;所述观 测器切换开关的输入端与磁链外环控制模块、电流内环控制模块相连,输出端与磁链外环 控制模块相连;所述电流内环控制模块向电子开关S1、拓扑控制模块输出PWM信号,所述拓 扑控制模块的输出端与电子开关S4相连; 所述嵌入式控制系统工作时,检测到的线圈电压ucoil、线圈电流icoil同时送入电压 积分磁链观测器及磁链闭环状态观测器,分别用于观测起动过程中的磁链 及保持过程中 的磁链 嵌入式控制系统的过程控制模块根据时序要求,控制接触器进入起动、保持及分 断过程,在这些不同的过程可设定不同的磁链参考值ψref; 嵌入式控制系统的观测器切换开关负责两个观测器的切换来合成整个过程的磁 链观测值 所述拓扑控制模块根据观测器切换开关的动作信号来决定是否将开关管S4置为 常通状态。 所述嵌入式控制系统的软件策略按控制时序分为起动过程、保持过程及分断过 程;所述过程控制模块按控制指令,使嵌入式控制系统按不同的软件策略工作;当嵌入式控 制系统执行起动过程的软件策略时,观测器切换开关选择 ψref与 经过磁链外环控 制模块的滞环比较来控制电流内环控制模块的参考值iref,使其在电流最大值imax与0之间 变化,之后iref与icoil经过电流内环控制模块的滞环比较作用,输出信号PWM1及PWM4,PWM1 控制S1的通断状态,在起动过程中拓扑控制模块直接采用PWM4信号来控制S4的通断状态,使 电路状态在 1态和-1态间切换来快速达到参考电流,从而使接触器线圈磁路磁链等于起动 7 CN 111580436 A 说 明 书 4/7 页 磁链参考值; 当嵌入式控制系统执行保持过程的软件策略时,ψref被设定为保持值,观测器切换 开关依然选择 并与ψref滞环比较来控制iref,iref与icoil滞环比较,控制电路状态在 1 态和-1态间切换来快速达到ψref,磁路磁链等于保持磁链参考值后观测器切换开关选择 将磁链闭环状态观测器接入磁链外环控制模块,进行保持磁链的观测器的平稳衔 接,同时拓扑控制模块检测到观测器切换开关的切换信号,将S4置为常通,使接触器线圈电 路状态仅在 1态和0态间切换来维持保持线圈电流动态恒定,降低电子开关的导通周期数, 减小损耗,进行更好的节能保持; 当嵌入式控制系统执行分断过程的软件策略时,过程控制模块直接控制电流内环 将PWM1及PWM4设为0,配合拓扑控制模块迅速将电路状态设为-1态,使接触器电磁线圈快速 退磁,接触器分断。 本发明克服了单独电流闭环保持过程的缺陷,同时也进一步提高了接触器起动过 程优化控制的灵活性。 附图说明 下面结合附图和











