
技术摘要:
本发明提供一种配送系统,包括:判断部,其对如下情况进行判断,即,在通过收纳有配送物的车辆而使所述配送物一次移动至配送目标附近之后,于通过移动体而使所述配送物从所述车辆向所述配送目标进行二次移动之时,被搭载于所述车辆上的第一移动体、以及被配备于所述配 全部
背景技术:
在日本特开2016-153337号公报中,公开了一种如下的配送系统,即,将作为移动 体的无人机与应当配送的货物一起搭载于车辆(配送车)上并进行送货到家。在该系统中, 配送车在车顶上具有起降空间和货物出库口,并且具有向该货物出库口的货物供给单元。 而且,领取了货物的无人机以飞行到宅邸的方式而实施送货到家。此外,当在一定地区内结 束了由该无人机实施的送货到家时,配送车与无人机一起向其他地区移动,并实施进一步 的送货到家。 在日本特开2016-153337号公报中所记载的技术中,通过被搭载于车辆上的无人 机,来实施从车辆向配送目标的配送物的配送。然而,对于现状下的无人机而言,例如如果 为了使可连续飞行的时间长时间化从而增大蓄电池的容量,则伴随于此会出现如蓄电池的 充电时间(即无法工作的期间)长时间化等的情况,从而运转率不一定高。因此,专利文献1 所记载的技术存在如下的可能性,即,由于无人机的运转率较低将成为难关而产生无法将 配送物从车辆向配送目标进行配送的期间,从而配送的效率不充分。 另外,虽然也考虑到了为了对每1台无人机的运转率较低的情况进行弥补而在车 辆上搭载多台无人机,但是在该情况下,由于在车辆中能够收纳的配送物的量会变少,因此 配送的效率降低。
技术实现要素:
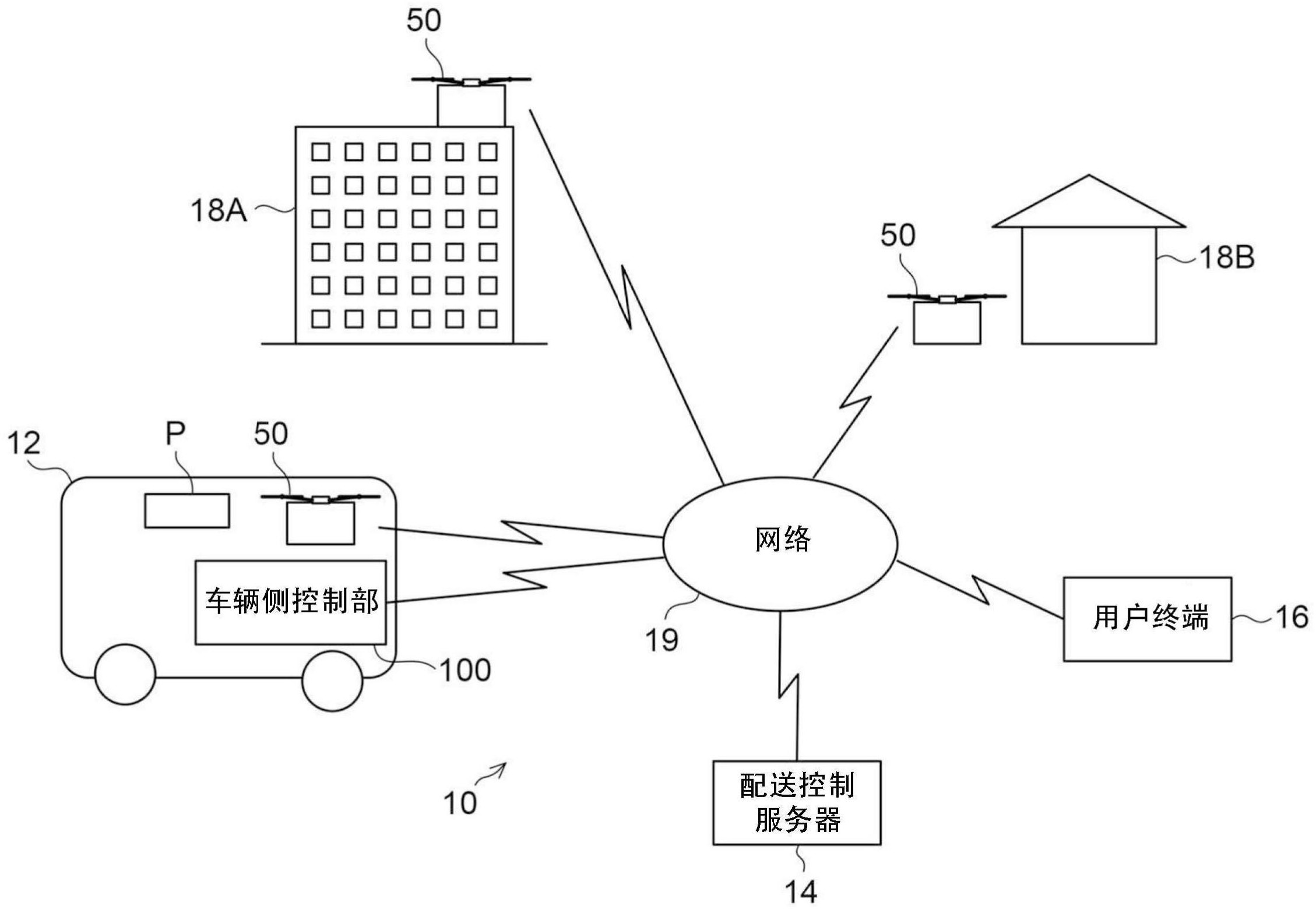
本公开内容是鉴于上述情况而被完成的发明,其提供一种能够提高使用收纳有配 送物的车辆以及移动体而对配送物进行配送的情况下的配送的效率的配送系统。 本公开内容的第一方式为一种配送系统,所述配送系统包括:判断部,其对如下情 况进行判断,即,在通过收纳有配送物的车辆而使所述配送物一次移动至配送目标附近之 后,于通过移动体而使所述配送物从所述车辆向所述配送目标进行二次移动之时,被搭载 于所述车辆上的第一移动体、以及被配备于所述配送目标或者该配送目标附近的第二移动 体之中是否存在能够利用于所述配送物的二次移动的移动体;控制部,其在由所述判断部 而判断为存在能够利用于所述配送物的二次移动的移动体的情况下,通过能够利用于所述 配送物的二次移动的所述移动体而实施所述配送物的二次移动。 在第一方式中,对被搭载于车辆上的第一移动体、以及被配备于配送目标或者该 配送目标附近的第二移动体之中是否存在能够利用于配送物的二次移动的移动体进行判 断。由此,与针对1台移动体而判断是否能够利用于配送物的二次移动的情况相比较,通过 增加判断对象的移动体的数量,从而提高了被判断为存在能够利用于配送物的二次移动的 移动体的概率。而且,由于在判断为存在能够利用于配送物的二次移动的移动体的情况下, 通过能够利用于配送物的二次移动的移动体来实施配送物的二次移动,因此能够提高使用 4 CN 111580543 A 说 明 书 2/13 页 收纳有配送物的车辆以及移动体来对配送物进行配送的情况下的配送效率。 在第一方式中,也可以采用如下方式,即,所述判断部对所述第一移动体以及所述 第二移动体之中,是否存在能够利用于对所述配送物而设定的配送希望时间段内的所述配 送物的二次移动的移动体进行判断,所述控制部在由所述判断部而判断为存在能够利用于 所述配送希望时间段内的所述配送物的二次移动的移动体的情况下,通过能够利用于所述 配送物的二次移动的所述移动体而实施配送希望时间段内的所述配送物的二次移动。 在对配送物而设定了配送希望时间段的情况下,与未对配送物设定配送希望时间 段的情况(能够在任意的时间段实施配送物的二次移动的情况)相比较,存在能够利用于配 送物的二次移动的移动体的可能性降低。与此相对,在上述结构中,由于对第一移动体以及 第二移动体之中是否存在能够利用于对配送物而设定的配送希望时间段内的配送物的二 次移动的移动体进行判断,因此提高了判断为存在能够利用于配送希望时间段内的配送物 的二次移动的移动体的概率。由此,即使在对配送物而设定了配送希望时间段的方式中,也 能够使配送效率得到提高。 在第一方式中,也可以采用如下方式,即,所述控制部在由所述判断部而判断为不 存在能够利用于所述配送物的二次移动的移动体的情况下,向所述配送目标进行通知。 在不存在能够利用于配送物的二次移动的移动体的情况下,以当初所设想的时间 段且配送方法而将配送物向配送目标进行配送较为困难。在上述结构中,在这样的情况下, 能够使配送目标认识到以当初所设想的时间段且配送方法而对配送物进行配送较为困难 的情况。 在第一方式中,所述控制部在由所述判断部而判断为不存在能够利用于所述配送 物的二次移动的移动体的情况下,将在能够利用某个移动体的时间段内通过在该时间段内 能够利用的移动体而使所述配送物进行二次移动的情况作为第一选择项而向所述配送目 标进行通知,并且在所述第一选择项被所述配送目标选择了的情况下,通过所述移动体而 在所述能够利用的时间段内实施所述配送物的二次移动。 在上述结构中,在于当初所设想的时间段内将配送物向配送目标进行配送较为困 难的情况下,配送目标选择在其他时间段内对配送物进行配送的情况变得可能,从而能够 在其他时间段内完成配送物的配送。 在第一方式中,也可以采用如下的方式,即,所述控制部在由所述判断部而判断为 不存在能够利用于所述配送物的二次移动的移动体的情况下,将所述配送物的收件人来到 所述车辆处领取所述配送物的情况作为第二选择项而向所述配送目标进行通知,并且在所 述第二选择项被所述配送目标选择了的情况下,使行驶到所述配送目标附近的所述车辆进 行待机直至所述收件人来到为止。 在上述结构中,在以当初所设想的配送方法将配送物向配送目标进行配送较为困 难的情况下,配送目标选择配送物的收件人来到车辆处领取配送物变得可能,从而能够在 不利用移动体的情况下将配送物交给配送物的收件人。 在第一方式中,也可以采用如下的方式,即,所述控制部在由所述判断部而判断为 不存在能够利用于所述配送物的二次移动的移动体的情况下,将中止所述配送物的配送的 情况作为第三选择项而向所述配送目标进行通知,并且在所述第三选择项被所述配送目标 选择了的情况下,中止所述配送物的二次移动。 5 CN 111580543 A 说 明 书 3/13 页 在上述结构中,在以当初所设想的时间段且配送方法将配送物向配送目标进行配 送较为困难的情况下,配送目标选择中止配送物的配送变得可能。 本公开内容的第二方式为一种配送方法,所述配送方法包括如下操作,即:对如下 情况进行判断,即,在通过收纳有配送物的车辆而使所述配送物一次移动至配送目标附近 之后,于通过移动体而使所述配送物从所述车辆向所述配送目标进行二次移动之时,被搭 载于所述车辆上的第一移动体、以及被配备于所述配送目标或者该配送目标附近的第二移 动体之中是否存在能够利用于所述配送物的二次移动的移动体;在判断为存在能够利用于 所述配送物的二次移动的移动体的情况下,通过能够利用于所述配送物的二次移动的所述 移动体而实施所述配送物的二次移动。 本公开内容的第三方式为一种非临时性存储介质,其存储有使计算机执行配送处 理的程序,所述配送处理包括如下操作,即:对如下情况进行判断,即,在通过收纳有配送物 的车辆而使所述配送物一次移动至配送目标附近之后,于通过移动体而使所述配送物从所 述车辆向所述配送目标进行二次移动之时,被搭载于所述车辆上的第一移动体、以及被配 备于所述配送目标或者该配送目标附近的第二移动体之中是否存在能够利用于所述配送 物的二次移动的移动体;在判断为存在有能够利用于所述配送物的二次移动的移动体的情 况下,通过能够利用于所述配送物的二次移动的所述移动体而实施所述配送物的二次移 动。 在本公开内容的方式中,能够提高使用收纳有配送物的车辆以及移动体来对配送 物进行配送的情况下的配送效率。 附图说明 图1为实施方式所涉及的配送系统的概要结构图。 图2为对在作为移动体而应用了无人机的方式中,对货物进行配送的流程进行说 明的说明图。 图3为表示车辆的结构的侧剖视图。 图4为表示被搭载于车辆上的设备的硬件结构的框图。 图5为表示无人机的结构的侧视图。 图6为表示无人机的硬件结构的框图。 图7为表示运行预定信息的一个示例的图表。 图8为表示配送控制服务器的硬件结构的框图。 图9为表示配送管理信息的一个示例的图表。 图10为表示配送计划决定处理的流程图。 图11为表示被显示在用户终端上的消息的一个示例的示意图。 图12为表示最终配送控制处理的流程图。 图13为对在作为移动体而应用了行驶机器人的方式中,对货物进行配送的流程进 行说明的说明图。 图14为表示行驶机器人的结构的侧视图。 6 CN 111580543 A 说 明 书 4/13 页











