
技术摘要:
本发明提供一种消毒杀菌机器人,涉及消毒杀菌技术领域,包括头部、设置于头部下方的躯干;其中,所述躯干上设置有消毒杀菌装置;所述头部设置有视野扫描装置,所述视野扫描装置用于对环境进行识别;所述头部内还设置有控制模块,所述控制模块包括网卡与芯片;所述视野 全部
背景技术:
由于医院、商场、车站等场所,人员流动量大,易于出现大量的病毒和细菌;这些病 毒和细菌存留于空气中和物体的表面,容易出现交叉感染;此外,医院的医疗器械等,也需 要进行杀菌消毒处理。 为提高杀菌消毒的效率,出现了杀菌机器人;但是目前的杀菌机器人,通常一种型 号的机器人只能适用于同一种场所,且在使用场所的情况发生变化时,杀菌模式不能随外 界情况的变化而发生改变,从而使得杀菌机器人的使用不便。
技术实现要素:
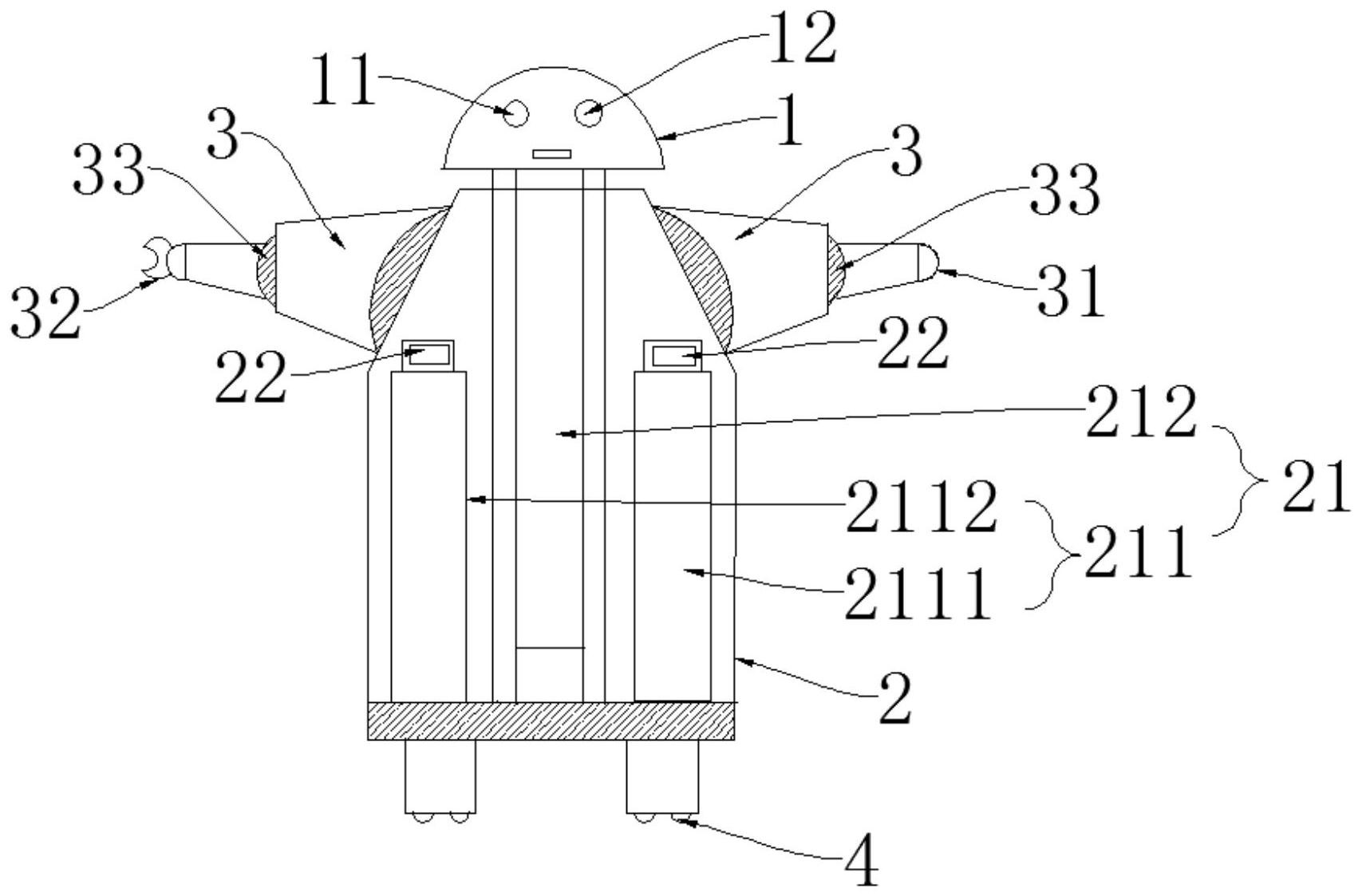
本发明解决的技术问题是目前杀菌机器人的杀菌模式不能随外界情况的变化而 发生改变,导致杀菌机器人的使用不便。 为解决上述问题,本发明提供一种消毒杀菌机器人,包括头部、设置于头部下方的 躯干;其中, 所述躯干上设置有消毒杀菌装置; 所述头部设置有视野扫描装置,所述视野扫描装置用于对环境进行识别; 所述头部内还设置有控制模块,所述控制模块包括网卡与芯片; 所述视野扫描装置、所述消毒杀菌装置均与所述控制模块信号连接。 可选地,所述头部还设置有红外热感检测装置;所述红外热感检测装置与所述控 制模块信号连接。 可选地,还包括两个设置于所述躯干两侧的上肢;至少一个所述上肢上设置有集 成传感器,所述集成传感器用于检测环境参数;所述集成传感器与所述控制模块系信号连 接。 可选地,至少一个所述上肢上设置有机械夹持手臂。 可选地,所述集成传感器以及所述机械夹持手臂均通过转轴与所述上肢相连。 可选地,所述消毒杀菌装置包括等离子体发生器,所述躯干上设置有与所述等离 子体发生器相适配的等离子体出口。 可选地,所述等离子体发生器包括介质阻挡放电等离子发生器。 可选地,所述等离子体发生器还包括射频放电等离子发生器。 可选地,所述消毒杀菌装置还包括紫外杀菌灯管。 可选地,所述紫外杀菌灯管通过滑轨与所述躯干连接;所述滑轨于所述躯干上沿 竖直方向分布。 与现有技术相比,本发明提供的消毒杀菌机器人具有如下优势: 本发明提供的消毒杀菌机器人,通过设置视野扫描装置来对待消毒环境进行扫 3 CN 111588875 A 说 明 书 2/5 页 描,根据扫描结果来判断消毒杀菌的需求,再根据该需求来控制消毒杀菌装置的运行,使得 消毒杀菌装置的运行模式能够随环境的改变而进行相应的变化,从而使得消毒杀菌装置的 运行能够满足不同的消毒杀菌需求,适用范围广,使用方便。 附图说明 图1为本发明所述的消毒杀菌机器人的结构简图。 附图标记说明: 1-头部;11-视野扫描装置;12-红外热感检测装置;2-躯干;21-消毒杀菌装置; 211-等离子体发生器;2111-介质阻挡放电等离子发生器;2112-射频放电等离子发生器; 212-紫外杀菌灯管;22-等离子体出口;3-上肢;31-集成传感器;32-机械夹持手臂;33-转 轴;4-移位轮。











