
技术摘要:
本发明公开了一种四轴同平面校正平台及原点回归方法,属于对位平台技术领域,包括:固定平台、设置于固定平台上的第一位移旋转单元、第二位移旋转单元、第三位移旋转单元和第四位移旋转单元,且均包括:固设于固定平台的基板;可沿直线往复移动的下支撑座;驱动马达、 全部
背景技术:
四轴共平面对位校正平台发展的基础是基于三轴共平面对位平台(以下简称XXY 对位平台)而来,其架构于将四座平移旋转单元架设于固定平台,并通过驱动器提供动力进 而带动测量平台。 现有技术中的四轴共平面对位平台在进行搜寻工作原点时,四轴共平面对位平台 除需考虑对X、Y轴向复归外,需还考虑θ轴向复归,其结构复杂,程序设置繁琐。 因此,急需一种只需考虑X、Y轴向复归且结构简单、操作程序简洁的四轴同平面校 正平台及原点回归方法。
技术实现要素:
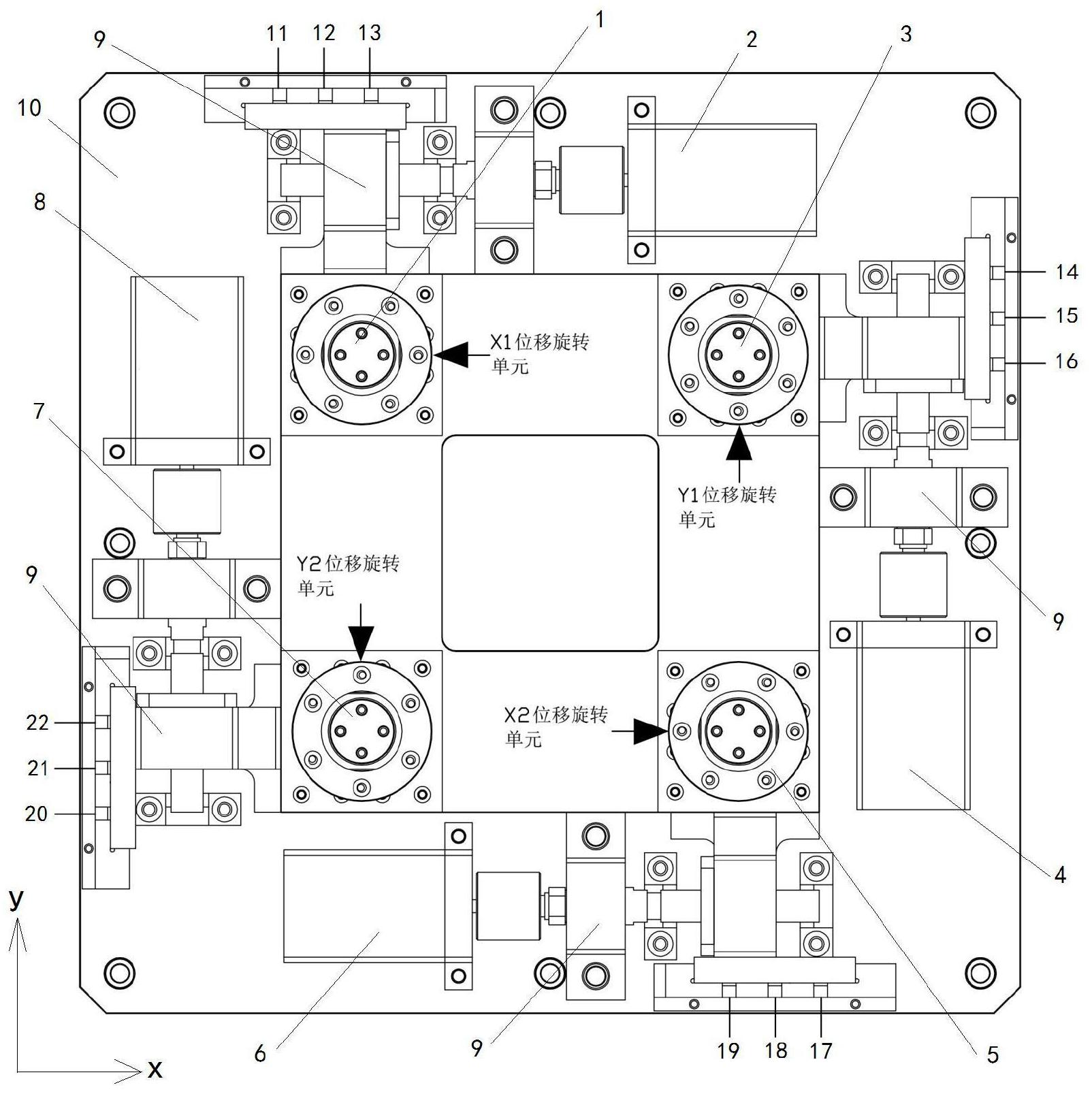
本发明的目的在于提供一种只考虑X、Y轴向复归且结构简单、操作程序简洁的四 轴同平面校正平台及原点回归方法。本发明采取了如下技术方案: 一种四轴同平面校正平台,包括:固定平台、设置于所述固定平台上的第一位移旋 转单元、第二位移旋转单元、第三位移旋转单元和第四位移旋转单元; 所述固定平台,用于提供测量装置设置或固定; 所述第一位移旋转单元、第二位移旋转单元、第三位移旋转单元和第四位移旋转 单元依次分布于所述固定平台四角,且均包括: 固设于所述固定平台的基板; 可沿直线往复移动地设置于所述基板上的下支撑座; 设置于所述基板上的驱动马达,所述驱动马达与所述下支撑座相对设置; 驱动机构,所述驱动机构设置于所述下支撑座的所述驱动马达侧,与所述驱动马 达输出端固定连接,用于驱动所述下支撑座相对所述基板移动; 可沿直线往复移动地设置于所述下支撑座上的上支撑座,所述上支撑座的移动方 向与所述下支撑座的移动方向垂直; 所述第一位移旋转单元的下支撑座与所述第三位移旋转单元的下支撑座移动方 向相同; 所述第二位移旋转单元的下支撑座与所述第四位移旋转单元的下支撑座移动方 向相同,且与所述第一位移旋转单元的下支撑座移动方向垂直。 进一步地,所述驱动机构为丝杠运动副;所述下支撑座与所述丝杠运动副的滑块 固定连接。 进一步地,所述下支撑座与所述基板之间、所述下支撑座与所述上支撑座之间通 过导轨和导槽结构连接。 4 CN 111604867 A 说 明 书 2/5 页 进一步地,所述固定平台为XY平面,其中,所述第一位移旋转单元的下支撑座移动 方向设定为X轴方向,所述第二位移旋转单元的下支撑座移动方向设定为Y轴方向。 进一步地,在对应所述第一位移旋转单元、第二位移旋转单元、第三位移旋转单元 和第四位移旋转单元的下支撑座移动方向上,其所述基板分别设置有定位原点、正极限位 点和负极限位点,所述正极限位点和负极限位点设置于所述定位原点两端,用于限定所述 第一位移旋转单元、所述第二位移旋转单元、所述第三位移旋转单元和所述第四位移旋转 单元移动范围;其中,正极限位点设置于所述定位原点的X轴或Y轴正向方向。 进一步地,对应所述第一位移旋转单元的定位原点、正极限位点和负极限位点分 别设置为X1原点、X1 极限和X1-极限;对应所述第二位移旋转单元的定位原点、正极限位点 和负极限位点分别设置为Y1原点、Y1 极限和Y1-极限;对应所述第三位移旋转单元的定位 原点、正极限位点和负极限位点分别设置为X2原点、X2 极限和X2-极限;对应所述第四位移 旋转单元的定位原点、正极限位点和负极限位点分别设置为Y2原点、Y2 极限和Y2-极限。 进一步地,对应所述第一位移旋转单元、所述第二位移旋转单元、所述第三位移旋 转单元和所述第四位移旋转单元对应设置为X1位移旋转单元、Y1位移旋转单元、X2位移旋 转单元和Y2位移旋转单元;所述驱动马达包括:分别对应所述X1位移旋转单元、所述Y1位移 旋转单元、所述X2位移旋转单元、所述Y2位移旋转单元设置的X1单元驱动马达、Y1单元驱动 马达、X2单元驱动马达、Y2单元驱动马达。 进一步地,所述传动机构为丝杠运动副。 一种四轴同平面校正平台原点回归方法,包括以下步骤: S1、控制器同时驱动Y1单元驱动马达带动Y1位移旋转单元向Y1 极限和X2单元驱 动马达带动X2位移旋转单元向X2 极限位移,直到感应到Y1 极限或X2 极限,即同时停止Y1 单元驱动马达和X2单元驱动马达并停留在当前位置; S2、控制器同时驱动Y2单元驱动马达带动Y2位移旋转单元向Y2 极限和X1单元驱 动马达带动X1位移旋转单元向X1 极限位移,直到感应到Y2 极限或X1 极限,即同时停止Y2 单元驱动马达和X1单元驱动马达并停留在当前位置; S3、通过X1 极限、X1-极限、X2 极限、X2-极限、Y1 极限、Y1-极限、Y2 极限和Y2-极 限状态来确定下一步复归动作: 1)Y1 极限和Y2 极限同时感应到时:控制器同时驱动X1单元驱动马达带动X1位移 旋转单元向X1 极限和X2单元驱动马达带动X2位移旋转单元向X2 极限位移,直到感应到X1 极限或X2 极限,即同时停止X1单元驱动马达和X2单元驱动马达,并停留在当前位置,同时 转跳到S6; 2)X1 极限和X2 极限同时感应到时,直接跳到S4; 3)X1 极限、X2 极限、Y1 极限、Y2 极限同时感应时,直接跳到S6; S4、控制器同时驱动Y1单元驱动马达带动Y1位移旋转单元向Y1 极限和X1单元驱 动马达带动X1位移旋转单元向X1-极限位移,直到感应到Y1 极限,即同时停止Y1单元驱动 马达和X1单元驱动马达,并停留在当前位置; S5、控制器同时驱动X1单元驱动马达带动X1位移旋转单元向X1 极限和Y2单元驱 动马达带动Y2位移旋转单元向Y2 极限位移,直到感应到Y2 极限,即同时停止Y2单元驱动 马达和X1单元驱动马达,并停留在当前位置; 5 CN 111604867 A 说 明 书 3/5 页 S6、控制器同时驱动X1单元驱动马达带动X1位移旋转单元向X1-极限和X2单元驱 动马达带动X2位移旋转单元向X2-极限位移,直到感应到X1原点或X2原点,即同时停止X1和 X2单元驱动马达,X轴原点复归完成; 控制器同时驱动Y1单元驱动马达带动Y1位移旋转单元向Y1-极限和Y2单元驱动马 达带动Y2位移旋转单元向Y2-极限位移,直到感应到Y1原点或Y2原点,即同时停止Y1和Y2单 元驱动马达,Y轴原点复归完成。 本发明有益效果: 本发明提供了一种四轴同平面校正平台及原点回归方法,在四轴共平面校正平台 对位时只产生X、Y复合偏移量时,其控制程序简洁,平台结构简单,工作效率高。 附图说明 图1一种四轴同平面校正平台俯视结构示意图 其中,1、X1位移旋转单元;2、X1单元驱动马达;3、Y1位移旋转单元;4、Y1单元驱动 马达;5、X3位移旋转单元;6、X2单元驱动马达;7、Y2移旋转单元;8、Y2单元驱动马达;9、驱动 机构;10、固定平台;11、X1-极限;12、X1原点;13、X1 极限;14、Y1 极限;15、Y1原点;16、Y1- 极限;17、X2 极限;18、X2原点;19、X2-极限;20、Y2-极限;21、Y2原点;22、Y2 极限。











