
技术摘要:
本发明提供了一种基于ECO算法和区域生长分割的视觉目标跟踪方法及装置,该方法包括以下步骤:读取视频或图像序列的第一帧图像,确定跟踪目标;将当前帧跟踪目标作为样本放入ECO算法训练相关滤波器;读取下一帧图像,利用训练好的相关滤波器卷积图像候选区域获取目标位 全部
背景技术:
视觉目标跟踪是计算机视觉中一个重要研究方向,在军事无人飞行器、精确制导 以及空中预警和民用视频监控,人机交互和无人驾驶等众多领域有着极其广泛的应用,然 而目标跟踪面临着目标尺度变换、重度遮挡、快速移动、超出视野和光照变化等众多挑战, 因此提出一种可靠的实时视觉目标跟踪方法具有很重要的现实意义。 以往的相关滤波视觉目标跟踪算法主要是使用给出的样本去训练一个判别分类 器,判断跟踪到的是目标还是周围的背景信息。主要使用轮转矩阵对样本进行采集,使用快 速傅里叶变换对算法进行加速计算,而ECO目标跟踪算法在此基础上着重于解决模型过大 的问题,通过减少参数,简化训练集,减少模型更新频率来加快跟踪速度,对抗模型漂移。对 于目标轻度遮挡、姿态改变以及光照变化具有很好的跟踪效果,然而对于目标长期跟踪过 程中出现的目标重度遮挡、快速移动以及超出视野等情况下,容易导致跟踪失败。
技术实现要素:
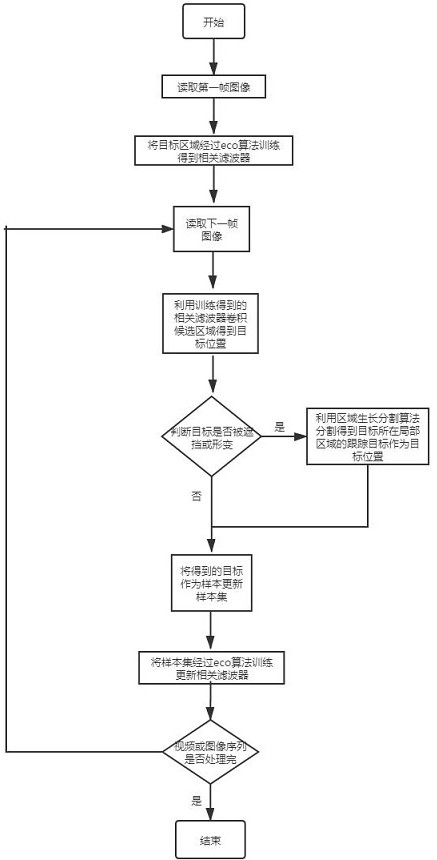
本发明的目的在于提供一种基于ECO算法和区域生长分割的视觉目标跟踪方法及 装置,旨在用于解决ECO目标跟踪算法在面对目标遮挡或形变情况下样本获取不正确,导致 训练效果受影响的问题。 本发明是这样实现的: 一方面,本发明提供一种基于ECO算法和区域生长分割的视觉目标跟踪方法,包括以下 步骤: S1、读取视频或图像序列的第一帧图像,确定跟踪目标; S2、将当前帧跟踪目标作为样本放入ECO算法训练相关滤波器; S3、读取下一帧图像,利用训练好的相关滤波器卷积图像候选区域对应的特征,获取图 像候选区域的置信度图,置信度图概率最大位置对应当前帧图像的目标位置及其置信度概 率; S4、判断该图像中目标是否遮挡或形变; S5、若发生遮挡或形变则对候选区域进行分割,将分割出的目标作为样本替换ECO算法 产生的样本,若未发生遮挡或形变则仍使用ECO算法产生的样本; S6、使用样本融合更新策略,更新ECO算法的样本集; S7、利用获取的样本集训练ECO算法,更新相关滤波器; S8、循环执行步骤S3~S7,直至当前视频或图像序列处理完。 进一步地,所述步骤S2具体包括: 先对跟踪目标所在候选区域z提取多尺度特征x,包括hog特征以及颜色cn特征,将提取 6 CN 111598925 A 说 明 书 2/8 页 的特征进行pca降维,然后通过傅里叶变换由时域转为频域,傅里叶转化公式如下: 其中 为降维后的离散特征,N、M对应二维离散特征的行数和列数; 进一步将傅里叶变换之后的特征值插到连续域,公式如下: 其中Xd是第d层特征,Nd为每层特征的行数,bd为事先计算的权重,T为连续区间的右侧, 随后将各个特征图和相关滤波器进行卷积操作,公式如下: 其中,fd对应的是第d层特征通道对应相关滤波器, 为第d层特征通道的连续域 特征图, 为所有特征通道, 为样本x的得分置信度; 求解相关滤波器则通过最小化损失函数来实现,公式如下: 其中yj为label,即由当前训练样本对应生成且服从高斯向分布,αj为训练样本xj对应 的权重,w为正则化因子。 进一步地,所述步骤S4具体包括: 将当前帧识别出的目标区域转化成二值图,并分成多个小块,找到上一次判断的未遮 挡目标,同样分块并进行对应块相减,若每个小块的差值大于设置的阈值,则视为产生了遮 挡或形变。 进一步地,所述步骤S5中使用区域生长分割算法对候选区域进行分割,所述区域 生长分割算法过程如下: (1)从ECO算法识别出的目标区域的四条边中,每条边随机选取一个像素点(x0, y0); (2)以(x0, y0)为中心,考虑(x0, y0)的4邻域或者8邻域像素(x,y)与种子像素的灰度 值之差的绝对值小于某个阈值T,如果满足条件,将(x, y)与(x0, y0)合并,同时将(x, y) 压入堆栈; (3)从堆栈中取出一个像素,把它当作(x0, y0)返回到步骤(2); (4)当堆栈为空时返回到步骤(1); (5)重复步骤(1)~(4)直到图像中的每个点都有归属时,生长结束。 进一步地,所述步骤S6中使用的样本融合更新策略具体为: 设定样本集中最大样本数量,则若: (1)样本集未满,将新样本放到空余处; (2)样本集已满,且样本集中有低于阈值权重的样本,此时用新样本替换旧样本; (3)样本集已满,且新样本与所有现有样本的距离中的最小值小于现有样本距离间的 最小值,此时将新样本与最近样本融合; 7 CN 111598925 A 说 明 书 3/8 页 (4)样本集已满,且新样本与所有现有样本的距离中的最小值大于现有样本距离间的 最小值,此时将两个最近的现有样本融合,并将新样本放在融合后样本集空缺处。 另一方面,本发明还提供一种基于ECO算法和区域生长分割的视觉目标跟踪装置, 包括: 跟踪目标确定模块,用于读取视频或图像序列的第一帧图像,确定跟踪目标; 滤波器训练模块,用于将当前帧跟踪目标作为样本放入ECO算法训练相关滤波器; 目标位置确定模块,用于读取下一帧图像,利用训练好的相关滤波器卷积图像候选区 域对应的特征,获取图像候选区域的置信度图,置信度图概率最大位置对应当前帧图像的 目标位置及其置信度概率; 遮挡变形判断模块,用于判断该图像中目标是否遮挡或形变; 样本确定模块,用于若发生遮挡或形变则对候选区域进行分割,将分割出的目标作为 样本替换ECO算法产生的样本,若未发生遮挡或形变则仍使用ECO算法产生的样本; 样本集更新模块,用于使用样本融合更新策略,更新ECO算法的样本集; 滤波器更新模块,用于利用获取的样本集训练ECO算法,更新相关滤波器; 循环控制模块,用于控制目标位置确定模块、遮挡变形判断模块、样本确定模块、样本 集更新模块以及滤波器更新模块循环执行,直至当前视频或图像序列处理完。 进一步地,所述滤波器训练模块具体用于: 先对跟踪目标所在候选区域z提取多尺度特征x,包括hog特征以及颜色cn特征,将提取 的特征进行pca降维,然后通过傅里叶变换由时域转为频域,傅里叶转化公式如下: 其中 为降维后的离散特征,N、M对应二维离散特征的行数和列数; 进一步将傅里叶变换之后的特征值插到连续域,公式如下: 其中Xd是第d层特征,Nd为每层特征的行数,bd为事先计算的权重,T为连续区间的右侧, 随后将各个特征图和相关滤波器进行卷积操作,公式如下: 其中,fd对应的是第d层特征通道对应相关滤波器, 为第d层特征通道的连续域 特征图, 为所有特征通道, 为样本x的得分置信度; 求解相关滤波器则通过最小化损失函数来实现,公式如下: 其中yj为label,即由当前训练样本对应生成且服从高斯向分布,αj为训练样本xj对应 的权重,w为正则化因子。 进一步地,所述遮挡变形判断模块具体用于: 8 CN 111598925 A 说 明 书 4/8 页 将当前帧识别出的目标区域转化成二值图,并分成多个小块,找到上一次判断的未遮 挡目标,同样分块并进行对应块相减,若每个小块的差值大于设置的阈值,则视为产生了遮 挡或形变。 进一步地,所述样本确定模块具体使用区域生长分割算法对候选区域进行分割, 所述区域生长分割算法过程如下: (1)从ECO算法识别出的目标区域的四条边中,每条边随机选取一个像素点(x0, y0); (2)以(x0, y0)为中心,考虑(x0, y0)的4邻域或者8邻域像素(x,y)与种子像素的灰度 值之差的绝对值小于某个阈值T,如果满足条件,将(x, y)与(x0, y0)合并,同时将(x, y) 压入堆栈; (3)从堆栈中取出一个像素,把它当作(x0, y0)返回到步骤(2); (4)当堆栈为空时返回到步骤(1); (5)重复步骤(1)~(4)直到图像中的每个点都有归属时,生长结束。 进一步地,所述样本集更新模块使用的样本融合更新策略具体为: 设定样本集中最大样本数量,则若: (1)样本集未满,将新样本放到空余处; (2)样本集已满,且样本集中有低于阈值权重的样本,此时用新样本替换旧样本; (3)样本集已满,且新样本与所有现有样本的距离中的最小值小于现有样本距离间的 最小值,此时将新样本与最近样本融合; (4)样本集已满,且新样本与所有现有样本的距离中的最小值大于现有样本距离间的 最小值,此时将两个最近的现有样本融合,并将新样本放在融合后样本集空缺处。 与现有技术相比,本发明具有以下有益效果: 本发明提供的这种基于ECO算法和区域生长分割的视觉目标跟踪方法及装置,算法主 体采用ECO目标跟踪算法,同时加入区域生长分割算法,观察到在遮挡或形变时,ECO算法框 中的目标易出现偏离,导致之后不再遮挡或形变时目标跟踪会受影响,于是对于目标出现 遮挡或形变时,结合局部区域生长分割得到形状轮廓更为完整的目标样本,进行ECO算法的 样本集更新,提升训练效果。 附图说明 图1为本发明实施例提供的一种基于ECO算法和区域生长分割的视觉目标跟踪方 法的流程图; 图2为本发明实施例提供的一种基于ECO算法和区域生长分割的视觉目标跟踪装置的 方框图。











