
技术摘要:
本发明公开了一种重载AGV纠偏控制方法,包括获取重载AGV车体当前需纠偏量并设定已纠偏量初始值为0;根据需纠偏离量与已纠偏量获得需纠偏差值;PID调节器根据需纠偏差值E(k)获得车轮相对车体的偏转角增量;通过偏转角增量调整重载AGV的车轮偏转角,并保持偏转角不变;获 全部
背景技术:
磁导航纠偏控制常用PID控制方法,PID控制方法技术成熟,应用非常广泛,而且它 具有结构简单,参数容易调整,易于实现,控制精度高,鲁棒性好等优点。PID控制方法中PID 调节器的作用是将标定值和控制系统的实际输入值作差得到偏差值,然后根据偏差比例、 偏差积分和偏差微分通过线性组合构成控制量,输入到被控系统调整输出。然而,当负载车 辆自动化运输采用磁导航时,车辆的负载重量会影响到车辆在自动化运输上姿态转换延时 的快慢,而此时采用传统重载AGV纠偏控制方法并不能有效的适用于每个场景。
技术实现要素:
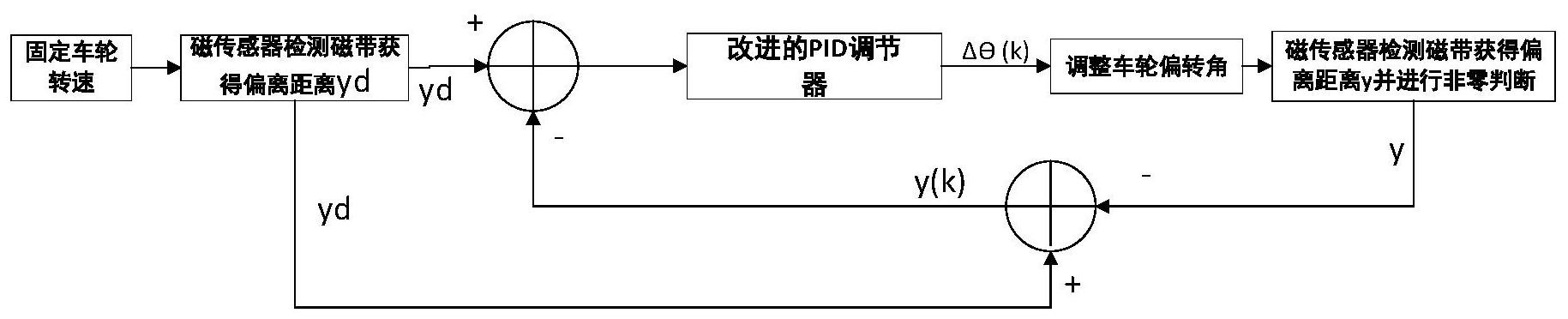
本发明的目的在于提供了一种重载AGV纠偏控制方法。 实现本发明目的的技术解决方案为:一种重载AGV纠偏控制方法,具体步骤为: 步骤1:获取重载AGV车体当前需纠偏量并设定已纠偏量初始值为0; 步骤2:根据需纠偏离量与已纠偏量获得需纠偏差值; 步骤3:PID调节器根据需纠偏差值E(k)获得车体偏转角增量; 步骤4:通过偏转角增量调整重载AGV的车轮偏转角,并保持偏转角不变; 步骤5:获取重载AGV车体当前需纠偏量,判断需纠偏量是否为0,若为0,完成纠偏, 否则进行下一步; 步骤6:更新已纠偏量,返回步骤2。 优选地,重载AGV车体当前需纠偏量的具体获取方法为: 通过设置在重载AGV上的磁传感器和直线行驶轨道上的磁带获得当前重载AGV车 体中心与磁带的偏离距离作为重载AGV车体当前需纠偏量。 优选地,需纠偏差值为需纠偏离量与已纠偏量的差值。 优选地,PID调节器根据需纠偏差值E(k)获得车体偏转角增量的具体方法为: 当需纠偏差值大于-V且小于V时,分别通过PID调节器的比例控制项、积分控制项、 微分控制项,获得三个输出值,并将三个输出值相加获得Δθ1(k); 当需纠偏差值小于-V或者大于V时,分别通过PID调节器的比例控制项、微分控制 项,获得两个输出值,并将两个输出值相加获得Δθ1(k); 对获得的θ1(k)进行限制幅度操作得到Δθ2(k); 对Δθ2(k)进行取整操作获得车轮的偏转角增量。 优选地,当需纠偏差值大于-V且小于V时,三个输出值分别为: p1=Kp[E(k)-E(k-1)] p2=KiE(k) p3=Kd[E(k)-2E(k-1) E(k-2)] 3 CN 111580513 A 说 明 书 2/3 页 式中,Kp、Ki、Kd表分别示PID控制器的比例控制系数,积分控制系数以及微分控制 系数; 当需纠偏差值小于-V或者大于V时,两个输出值分别为: p1=Kp[E(k)-E(k-1)] p3=Kd[E(k)-2E(k-1) E(k-2)]。 优选地,对获得的θ1(k)进行限制幅度得到Δθ2(k)的具体公式为: 本发明与现有技术相比,其显著优点为:1)本发明控制重载AGV的偏移纠正鲁棒性 好,能够适应大部分不同重量的重载AGV;2)本发明通过角度偏转的限幅能够避免纠偏过程 中的震荡,稳定性高;3)本发明采用了积分分离思想,将重载AGV的纠偏时间限制在2s以内。 下面结合附图对本发明作进一步详细描述。 附图说明 图1为重载AGV纠偏方法流程图。 图2为基于积分分离的PID控制流程图。











