
技术摘要:
本技术涉及使得可以适当地校正多视点的每个图像的阴影的信息处理设备、信息处理方法、程序和可互换透镜。通信单元接收与多个单眼图像中的每一个的阴影相关联的阴影信息,多个单眼图像在当包括单眼透镜的可互换透镜被装配到包括图像传感器的相机本体时由一个图像传感器 全部
背景技术:
例如,专利文献1描述了在考虑阴影效果的同时合成图像的图像处理设备。 [引用列表] [专利文献] 专利文献1:日本专利第3539394号
技术实现要素:
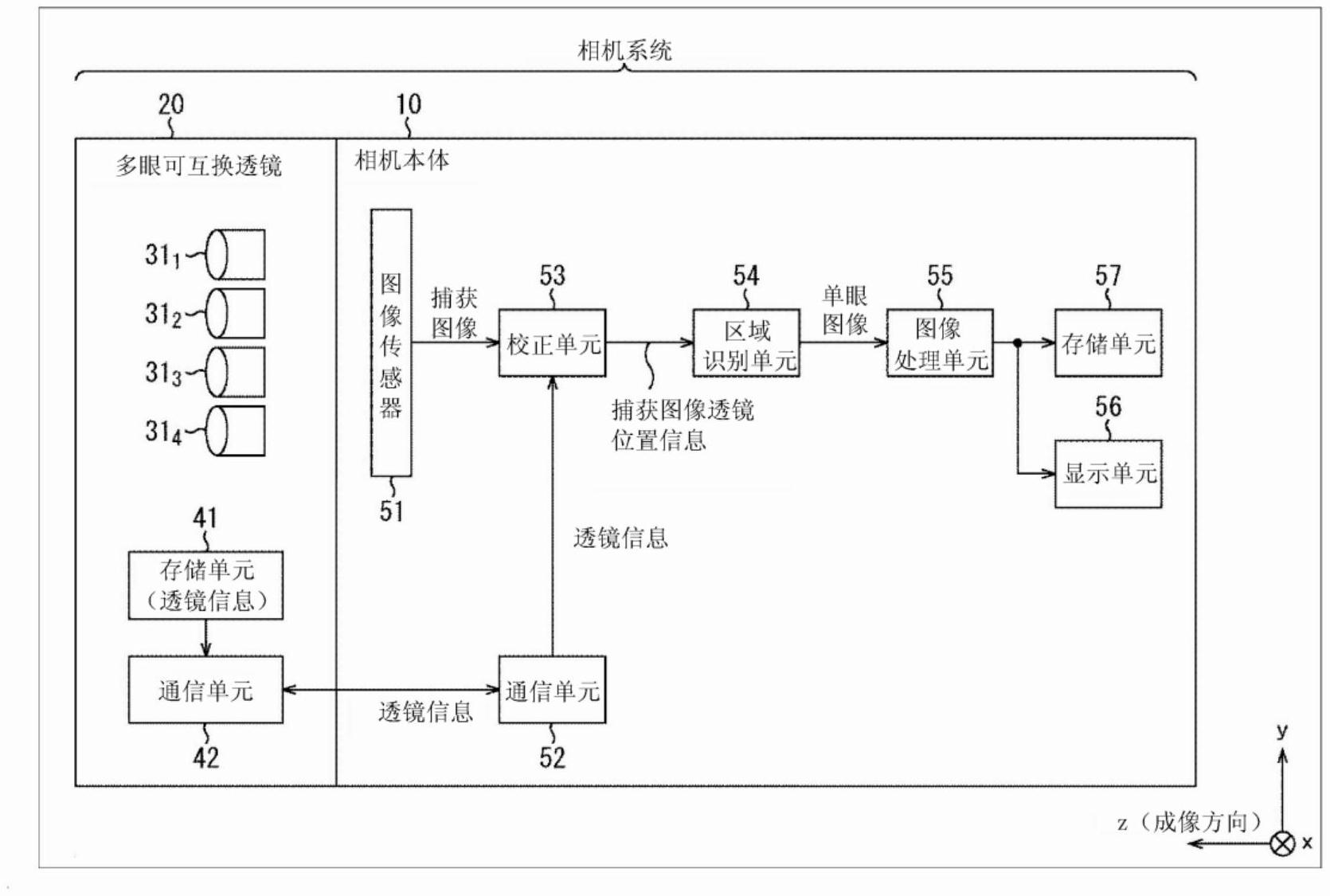
[技术问题] 为了执行诸如重新聚焦的特定图像处理,需要捕获具有多个视点的图像。 通常,在图像捕获期间会产生阴影。因此,在捕获具有多个视点的图像的情况下, 同样会产生阴影。因此,需要适当地校正具有多个视点的图像的阴影。 考虑到这种情况开发了本技术,并且本技术能够适当地校正具有多个视点的图像 的阴影。 [问题的解决方案] 根据本技术的信息处理设备或程序涉及信息处理设备或者使得计算机用作信息 处理设备的程序。该信息处理设备包括:通信单元,其接收与多个单眼图像中的每一个的阴 影相关联的阴影信息,多个单眼图像被包括在当可互换透镜被装配到包括一个图像传感器 的相机本体时由图像传感器获取的捕获图像中并且与通过由多个单眼透镜分别会聚的光 形成的图像对应,多个单眼透镜是被布置成在光轴方向上彼此不交叠的多个透镜并且被包 括在可互换透镜中;以及校正单元,其基于阴影信息来校正由图像传感器获取的捕获图像 中包括的、并且与多个单眼透镜分别对应的多个单眼图像中的每一个的阴影。 根据本技术的信息处理方法涉及由信息处理设备执行的信息处理方法。该信息处 理方法包括:接收与多个单眼图像中的每一个的阴影相关联的阴影信息,多个单眼图像被 包括在当可互换透镜被装配到包括一个图像传感器的相机本体时由图像传感器获取的捕 获图像中并且与通过由多个单眼透镜分别会聚的光形成的图像对应,多个单眼透镜是被布 置成在光轴方向上彼此不交叠的多个透镜并且被包括在可互换透镜中;以及基于阴影信息 来校正由图像传感器获取的捕获图像中包括的、并且与多个单眼透镜分别对应的多个单眼 图像中的每一个的阴影。 根据本技术的信息处理设备、信息处理方法和程序,接收阴影信息作为与多个单 眼图像中的每一个的阴影相关联的信息,多个单眼图像被包括在当可互换透镜被装配到包 括一个图像传感器的相机本体时由图像传感器获取的捕获图像中并且与通过由多个单眼 5 CN 111557090 A 说 明 书 2/30 页 透镜分别会聚的光形成的图像对应,多个单眼透镜是被布置成在光轴方向上彼此不交叠的 多个透镜并且被包括在可互换透镜中。另外,基于阴影信息来校正由图像传感器获取的捕 获图像中包括的、并且与多个单眼透镜分别对应的多个单眼图像中的每一个的阴影。 根据本技术的可互换透镜是下述可互换透镜,该可互换透镜包括:单眼透镜,其是 被布置成在光轴方向上彼此不交叠的多个透镜;存储单元,其存储与多个单眼图像中的每 一个的阴影相关联的阴影信息,多个单眼图像被包括在当多个单眼透镜被装配到包括一个 图像传感器的相机本体时由图像传感器获取的捕获图像中并且与通过由多个单眼透镜分 别会聚的光形成的图像对应;以及通信单元,其将阴影信息发送到外部。 根据本技术的可互换透镜,设置了单眼透镜,所述单眼透镜是被布置成在光轴方 向上彼此不交叠的多个透镜。存储了阴影信息作为与多个单眼图像中的每一个的阴影相关 联的信息,多个单眼图像被包括在当多个单眼透镜被装配到包括一个图像传感器的相机本 体时由图像传感器获取的捕获图像中并且与通过由多个单眼透镜分别会聚的光形成的图 像对应。阴影信息被发送到外部。 注意,信息处理设备可以是独立设备,或者可以是构成一个设备的内部块。 另外,允许将程序作为经由传输介质传输的程序或者作为记录在记录介质中的程 序来提供。 [本发明的有益效果] 根据本技术,可以适当地校正具有多个视点的图像的阴影。 注意,要提供的有益效果不一定限于本文中描述的有益效果,并且可以是本公开 内容中描述的任何有益效果。 附图说明 [图1]图1是描绘根据应用了本技术的一个实施方式的相机系统的配置示例的立 体图。 [图2]图2是描绘相机本体10的后表面的配置示例的后视图。 [图3]图3是描绘相机系统的电气配置示例的框图。 [图4]图4是说明使用多眼可互换透镜20执行的获取捕获图像的概要的图。 [图5]图5是描绘多眼可互换透镜20的单眼透镜311至314的位置的示例以及使用多 眼可互换透镜20获取的捕获图像的图。 [图6]图6是说明透镜阴影的图。 [图7]图7是描绘在将普通的单个可互换透镜装配到相机本体10的情况下捕获图 像的透镜阴影的阴影特性的示例的图。 [图8]图8是说明在将多眼可互换透镜20装配到相机本体10的情况下透镜阴影的 第一阴影校正的图。 [图9]图9是说明在将多眼可互换透镜20装配到相机本体10的情况下的第二阴影 校正的图。 [图10]图10是说明相机本体10的图像传感器51的光接收方向性的图。 [图11]图11是描绘在将单个可互换透镜装配到相机本体10的情况下捕获图像的 传感器阴影的阴影特性的示例的图。 6 CN 111557090 A 说 明 书 3/30 页 [图12]图12是描绘出射光瞳的位置与像素的输出a之间的关系的示例的图。 [图13]图13是说明在将多眼可互换透镜20装配到相机本体10的情况下传感器阴 影的阴影特性的图。 [图14]图14是描绘在将多眼可互换透镜20装配到相机本体10的情况下捕获图像 的总阴影的阴影特性的示例的图。 [图15]图15是说明由图3中的校正单元53执行的阴影校正的流程图。 [图16]图16是说明由区域识别单元54执行的,用于识别捕获图像中的各个单眼图 像E#i的区域的区域识别处理的示例的流程图。 [图17]图17是描绘图像处理单元55中包括的并且执行重新聚焦的部分的功能配 置示例的框图。 [图18]图18是说明由图像处理单元55执行的图像处理的示例的流程图。 [图19]图19是描绘多眼可互换透镜20的另一配置示例的后视图。 [图20]图20是说明由插值单元82执行的插值图像生成的示例的图。 [图21]图21是说明由视差信息生成单元81执行的视差图生成的示例的图。 [图22]图22是说明通过由聚光处理单元83执行的聚光处理实现的重新聚焦的概 要的图。 [图23]图23是说明视差转换的示例的图。 [图24]图24是说明执行重新聚焦的聚光处理的示例的流程图。 [图25]图25是说明使用服务器获取透镜位置信息、透镜阴影信息、出射光瞳位置 信息和出射光瞳直径信息或总阴影信息的处理的示例的图。 [图26]图26是描绘在云中执行阴影校正的情况下阴影校正系统的配置示例的框 图。 [图27]图27是描绘根据应用了本技术的一个实施方式的计算机的配置示例的框 图。











