
技术摘要:
本发明实施例公开了一种无人机自动返航方法和装置,所述方法包括:在无人机准备返航时,若检测到目标用户的脸部区域位于无人机的拍摄装置所拍摄的画面的水平中心线上,则控制无人机上升,使得上升后脸部区域在水平中心线的下方预设位置处,再控制无人机返航;在无人机 全部
背景技术:
在使用无人机自拍时,无人机返航时,若人脸在画面的正中间,也即无人机平行于 人脸返航,由于无人机上的拍摄装置的拍摄视角向下倾斜,故在返航过程中,随着无人机和 用户之间的距离的拉近,会导致人脸丢失,画面效果不佳。
技术实现要素:
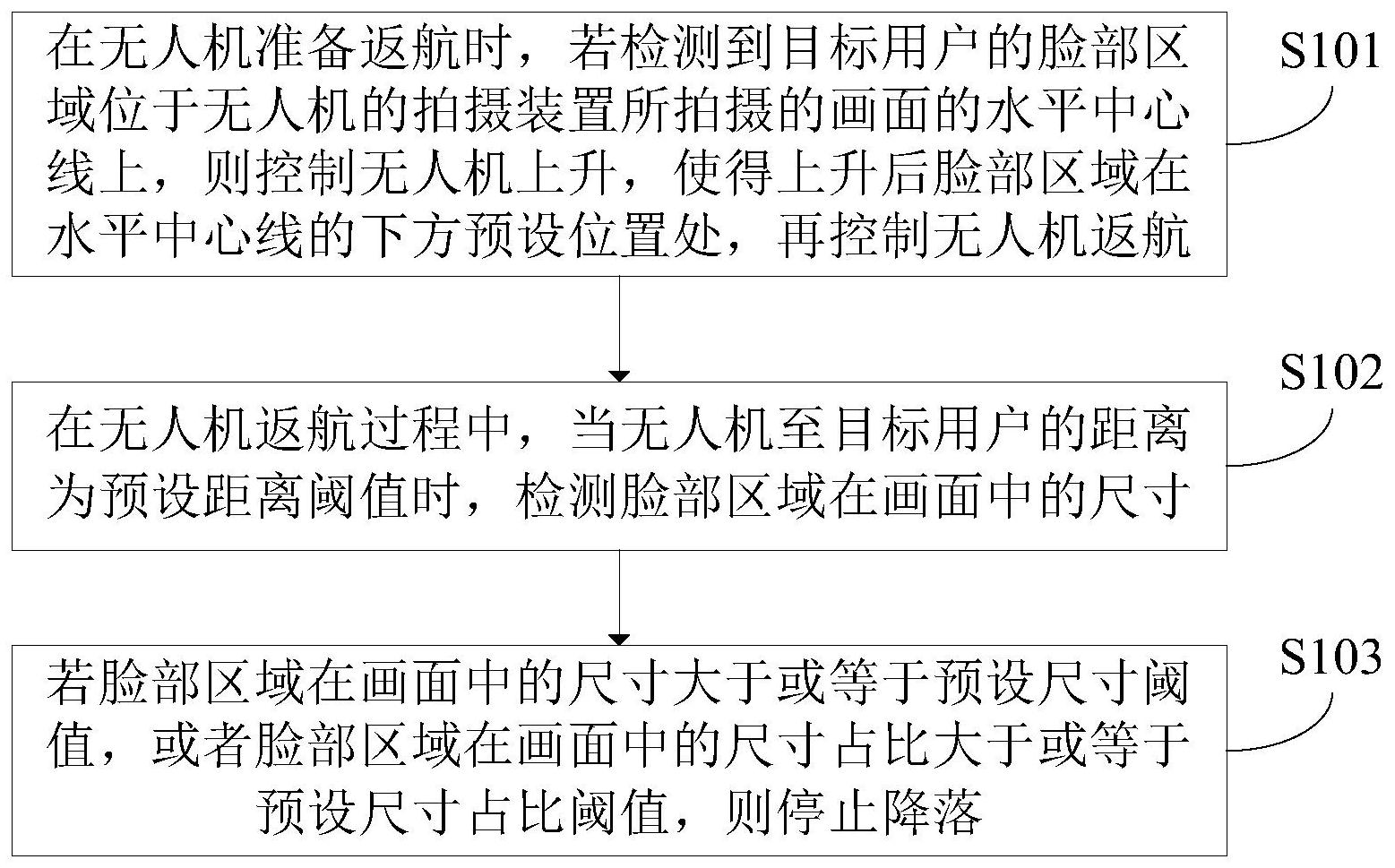
针对上述技术问题,本发明实施例提供了一种无人机自动返航方法和装置。 本发明实施例的第一方面提供一种无人机自动返航方法,所述方法包括: 在无人机准备返航时,若检测到目标用户的脸部区域位于所述无人机的拍摄装置 所拍摄的画面的水平中心线上,则控制所述无人机上升,使得上升后所述脸部区域在所述 水平中心线的下方预设位置处,再控制所述无人机返航; 在所述无人机返航过程中,当所述无人机至所述目标用户的距离为预设距离阈值 时,检测所述脸部区域在所述画面中的尺寸; 若所述脸部区域在所述画面中的尺寸大于或等于预设尺寸阈值,或者所述脸部区 域在所述画面中的尺寸占比大于或等于预设尺寸占比阈值,则停止降落。 可选地,所述预设位置至所述画面底部的距离与所述画面的高度的占比大于或等 于30%,并小于或等于40%。 可选地,所述方法还包括: 若所述脸部区域在所述画面中的尺寸小于所述预设尺寸阈值,或者所述脸部区域 在所述画面中的尺寸占比小于预设尺寸占比阈值,则重新控制所述无人机先上升再返航。 可选地,所述检测到目标用户的脸部区域位于所述无人机的拍摄装置所拍摄的画 面的水平中心线上之前,还包括: 控制所述拍摄装置的姿态和/或所述拍摄装置的拍摄参数,使得所述脸部区域位 于所述画面的中心,并使得所述脸部区域在所述画面中的尺寸为预设尺寸。 可选地,所述目标用户为默认用户;或者, 当所述画面中的用户包括多个时,所述目标用户为多个所述用户中处于特定位置 的用户。 本发明实施例的第一方面提供一种无人机自动返航装置,所述装置包括: 第一检测模块,用于在无人机准备返航时,若检测目标用户的脸部区域是否位于 所述无人机的拍摄装置所拍摄的画面的水平中心线上; 控制模块,用于在所述第一检测模块检测到目标用户的脸部区域位于所述无人机 的拍摄装置所拍摄的画面的水平中心线上时,控制所述无人机上升,使得上升后所述脸部 区域在所述水平中心线的下方预设位置处,再控制所述无人机返航; 4 CN 111580546 A 说 明 书 2/6 页 第二检测模块,用于在所述无人机返航过程中,当所述无人机至所述目标用户的 距离为预设距离阈值时,检测所述脸部区域在所述画面中的尺寸; 降落模块,用于在所述脸部区域在所述画面中的尺寸大于或等于预设尺寸阈值, 或者所述脸部区域在所述画面中的尺寸占比大于或等于预设尺寸占比阈值时,停止降落。 可选地,所述预设位置至所述画面底部的距离与所述画面的高度的占比大于或等 于30%,并小于或等于40%。 可选地,所述降落模块还用于在所述脸部区域在所述画面中的尺寸小于所述预设 尺寸阈值,或者所述脸部区域在所述画面中的尺寸占比小于预设尺寸占比阈值时,重新控 制所述无人机先上升再返航。 可选地,所述控制模块还用于在所述第一检测模块检测到目标用户的脸部区域位 于所述无人机的拍摄装置所拍摄的画面的水平中心线上之前,控制所述拍摄装置的姿态 和/或所述拍摄装置的拍摄参数,使得所述脸部区域位于所述画面的中心,并使得所述脸部 区域在所述画面中的尺寸为预设尺寸。 可选地,所述目标用户为默认用户;或者, 当所述画面中的用户包括多个时,所述目标用户为多个所述用户中处于特定位置 的用户。 本发明实施例提供的技术方案中,若目标用户的脸部区域在画面的水平中心线 上,则在控制无人机返航时,先控制无人机上升,使得脸部区域移动至水平中心线的下方预 设位置处,再控制所述无人机返航,如此可以确保无人机自动返航过程中,目标用户的脸部 区域始终在画面中,画面效果较佳;同时,在无人机返航过程中,当无人机至目标用户的距 离为预设距离阈值时,检测脸部区域在画面中的尺寸,当脸部区域在画面中的尺寸大于或 等于预设尺寸阈值,或者脸部区域在画面中的尺寸占比大于或等于预设尺寸占比阈值时, 停止降落,如此可以确保无人机自动返航过程中,脸部区域在画面始终能够被识别,进一步 确保了无人机自动返航过程中的画面的呈现效果。 附图说明 图1为本发明一实施例中的无人机自动返航方法的流程示意图; 图2A为本发明一实施例中的目标用户的脸部区域在画面中的位置示意图; 图2B为本发明一实施例中的目标用户的脸部区域在画面中的另一位置示意图; 图3为本发明另一实施例中的无人机自动返航方法的流程示意图; 图4为本发明一实施例中的无人机自动返航装置的结构示意图; 图5为本发明另一实施例中的无人机自动返航装置的结构示意图。











