
技术摘要:
本发明公开了主动磁悬浮导轨平台及控制方法,滑箱上壁设有直线电机、第一法向支承电磁铁和第二法向支承电磁体,滑箱的左侧壁设有第一导向电磁铁和第二导向电磁铁,滑箱的右侧壁设有第三导向电磁铁和第四导向电磁铁,滑箱的下壁设有第三法向支承电磁铁和第四法向支承电 全部
背景技术:
众所周知,机床导轨是机床的基本结构要素。机床的加工精度、加工效率和使用寿 命很大程度上取决于机床导轨的质量。随着技术的不断进步,对高档数控机床的导轨提出 更高的要求,要做到高速进给时不振动,低速进给时不爬行;要具有更高的响应速度,并能 在重载下长期连续工作;耐磨性高,精度保持性好等特点。对于大多数现有机床导轨,不可 避免地存在重载、高速下的磨损问题,而且存在一定的摩擦系数,进给速度不能发挥到极 大。 现有的主动磁悬浮导轨很难成为实用的机床导轨,原因是当载荷靠近小刚度的那 个支承点时,很容易造成失稳。当机床导轨的长度加长时,约束点就要远多于3个,更加无法 用这种主约束与副约束结合的方法来实现平面法向约束了。
技术实现要素:
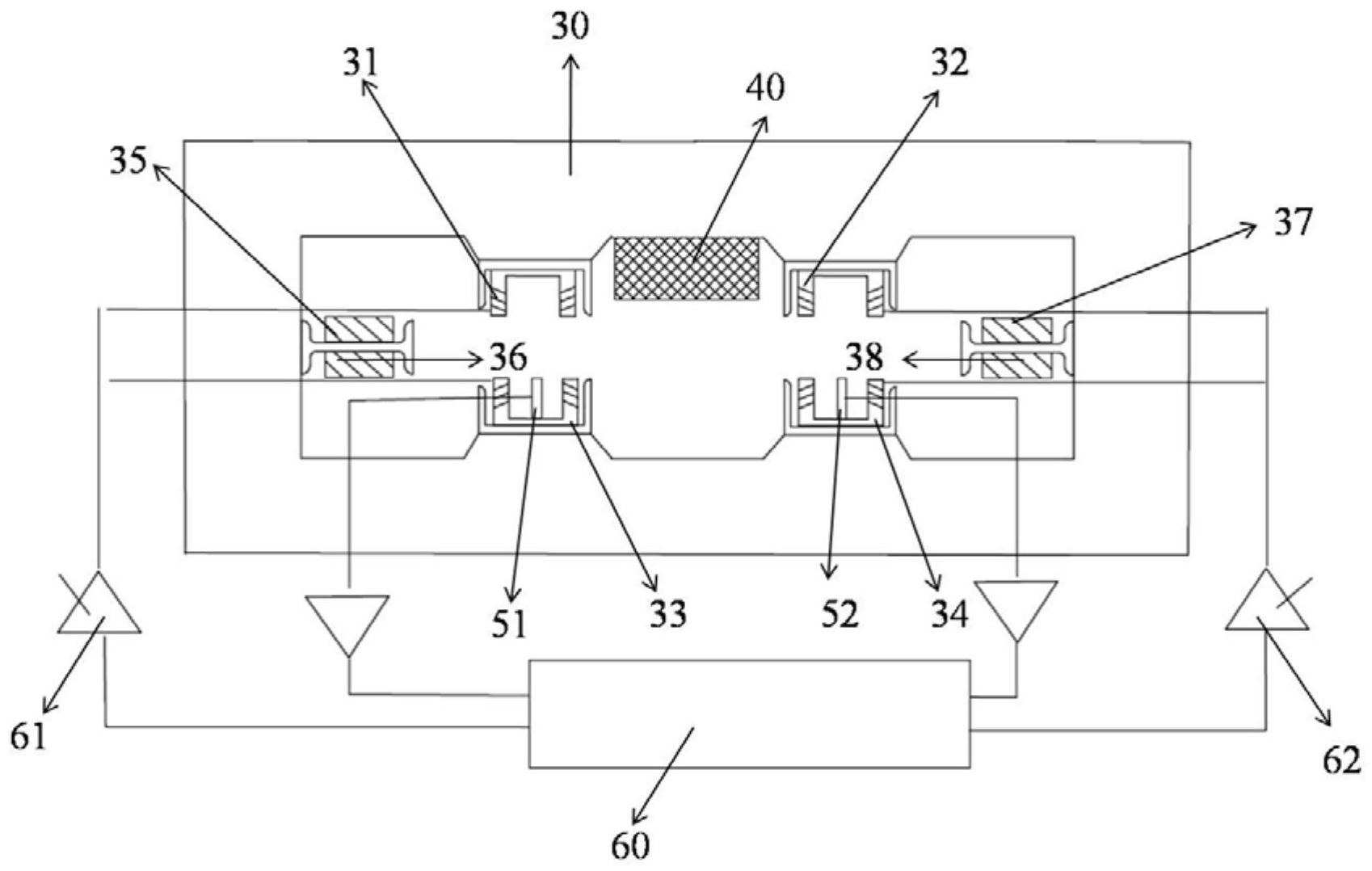
本发明的目的提供主动磁悬浮导轨平台,解决上述现有技术问题中的一个或者多 个。 根据本发明的主动磁悬浮导轨平台,包括底座、设于所述底座的导板、套设于所述 导板的滑箱以及设于所述底座的控制器,所述滑箱上壁设有直线电机、第一法向支承电磁 铁和第二法向支承电磁体,所述滑箱的左侧壁设有第一导向电磁铁和第二导向电磁铁,所 述滑箱的右侧壁设有第三导向电磁铁和第四导向电磁铁,所述滑箱的下壁设有第三法向支 承电磁铁和第四法向支承电磁铁,所述第三法向支承电磁铁设有第一位移传感器,所述第 四法向支承电磁铁设有第二位移传感器,所述第一位移传感器用于检测导板和第三法向支 承电磁铁之间的间隙,所述第二位移传感器用于检测导板和第四法向支承电磁铁之间的间 隙,所述控制器分别于所述第一位移传感器、第二位移传感器、第一法向支承电磁铁、第二 法向支承电磁铁、第三法向支承电磁铁以及第四法向支承电磁铁电连接。 在一些实施方式中,控制器与所述第一法向支承电磁铁和第三法向支承电磁铁之 间设有第一放大器,所述控制器与所述第二法向支承电磁铁和第四电磁铁之间设有第二放 大器。 在一些实施方式中,滑箱上壁对称设有第一支架和第二支架,所述第一支架用于 安装第一法向支承电磁铁,所述第二支架用于安装第二法向支承电磁铁,所述滑箱下壁对 称设有第三支架和第四支架,所述第三支架用于安装第三法向支承电磁铁,所述第四支架 用于安装第四法向支承电磁铁,所述滑箱左侧壁设有第五支架,所述第五支架用于安装所 述第一导向电磁铁和第二导向电磁铁,所述滑箱右侧壁设有第六支架,所述第六支架用于 安装所述第三导向电磁铁和第四导向电磁铁。 在一些实施方式中,第一支架、第二支架、第三支架以及第四支架均为“凵”字形支 4 CN 111571242 A 说 明 书 2/4 页 架,所述第五支架和第六支架均为“工”字形支架。 在一些实施方式中,第五支架包括第一竖杆、第一横杆以及第二竖杆,所述第一横 杆分别于所述第一竖杆和第二竖杆垂直设置,所述第一竖杆固定于所述滑箱的左侧壁,所 述第一导向电磁铁固定于所述第一横杆的上方,所述第二导向电磁铁固定于所述第一横杆 的下方;所述第六支架包括第三竖杆、第二横杆以及第四竖杆,所述第二横杆分别于所述第 三竖杆和第四竖杆垂直设置,所述第三竖杆固定于所述滑箱的右侧壁,所述第三导向电磁 铁固定于所述第二横杆的上方,所述第四导向电磁铁固定于所述第二横杆的下方。 在一些实施方式中,控制器为单片机。 根据本发明的主动磁悬浮导轨平台的控制方法,包括以下步骤: S1、位移传感器的探头检测出导板与第三法向支承电磁铁和第四方向支撑电磁铁 之间的间隙变化,并将该物理信号转换为电信号; S2、经过调理电路将电信号传输至控制器,控制器对检测到的位移信号按照施加 的主导型控制策略进行相关的运算,然后输出相应的控制电信号; S3、经过功率放大器放大后传送给第三法向支承电磁铁和第四方向支撑电磁铁, 调节电磁铁线圈中的电流的大小,使电磁铁线圈中产生的电磁力发生变化,从而保持导轨 系统处于平衡状态。 在一些实施方式中,步骤S3中的平衡状态为第三法向支承电磁铁和第四方向支撑 电磁铁的电磁力将滑箱悬浮起,并保持0.2mm的悬浮间隙。 有益效果:本发明主动磁悬浮导轨平台设计的支架,使得安装于支架上的法向支 承电磁铁的4个约束点理论平面充分接近实平际面时,不但颤振得到解决,而且承载力能得 到提升。其中,承载能力从2000N/m2提升到3000N/m2以上;静态平衡精度(传感器处跳动):从 ≤2.0μm达到≤1.5μm;动态平衡精度(传感器处跳动):从≤18μm达到≤10μm。 且该控制方法使得直线电机驱动滑箱使其沿着导板做无摩擦的精确受控运动。该 导轨平台是用磁浮力支承导轨载荷,精度保持性好,具有无摩擦,导轨不会磨损,进给响应 速度可以发挥至极大等优越性能。且磁悬浮导轨的无机械摩擦、无需润滑油等特点,可以极 大的改善工作条件和保护自然生态环境。 附图说明 图1为本发明的一种实施方式的主动磁悬浮导轨平台的结构示意图; 图2为本发明的一种实施方式的主动磁悬浮导轨平台的结构示意图; 图3为本发明的一种实施方式的主动磁悬浮导轨支架的结构示意图。











