
技术摘要:
本发明公开了智能电刀性能的测试方法和装置,方法包括以下步骤:获取预设焊接模型;根据第一阻值,获取与第一阻值对应的运动台位置;根据运动台位置,通过若干个无感电阻的接入进行第一阻值的模拟;根据模拟结果,获取智能电刀对应的参数;根据预设焊接模型和所述参数 全部
背景技术:
智能电刀是拥有智能监视系统的高频电刀,高频电刀是一种取代机械手术刀进行 组织切割的电外科器械,它通过电极(将高频电流送入人体,在电刀笔下的局部组织中形成 高密度电流,从而促使局部产生高热,进而达到切割和凝结两种电外科效果。在使用智能电 刀时,操作者只需用闭合器械将组织夹持牢固,启动输出后,系统随作用软组织的阻抗的变 化,会自动和持续地输出高频能量直至闭合完成,操作者无需手动控制能量输出和停止,进 而减少手术过程中的热损伤,提高手术质量及软组织焊接吻合强度。 然而,在现今对智能电刀的测试中,一般只能通过一些测试仪去检测电刀的外部 参数来评估智能电刀的性能,例如测量高频电刀的输出功率、最大电压、峰值电流等性能指 标,而并没有相关的测试手段能够评估在软组织的阻抗发生变化时,智能电刀是否能自动 进行调整。
技术实现要素:
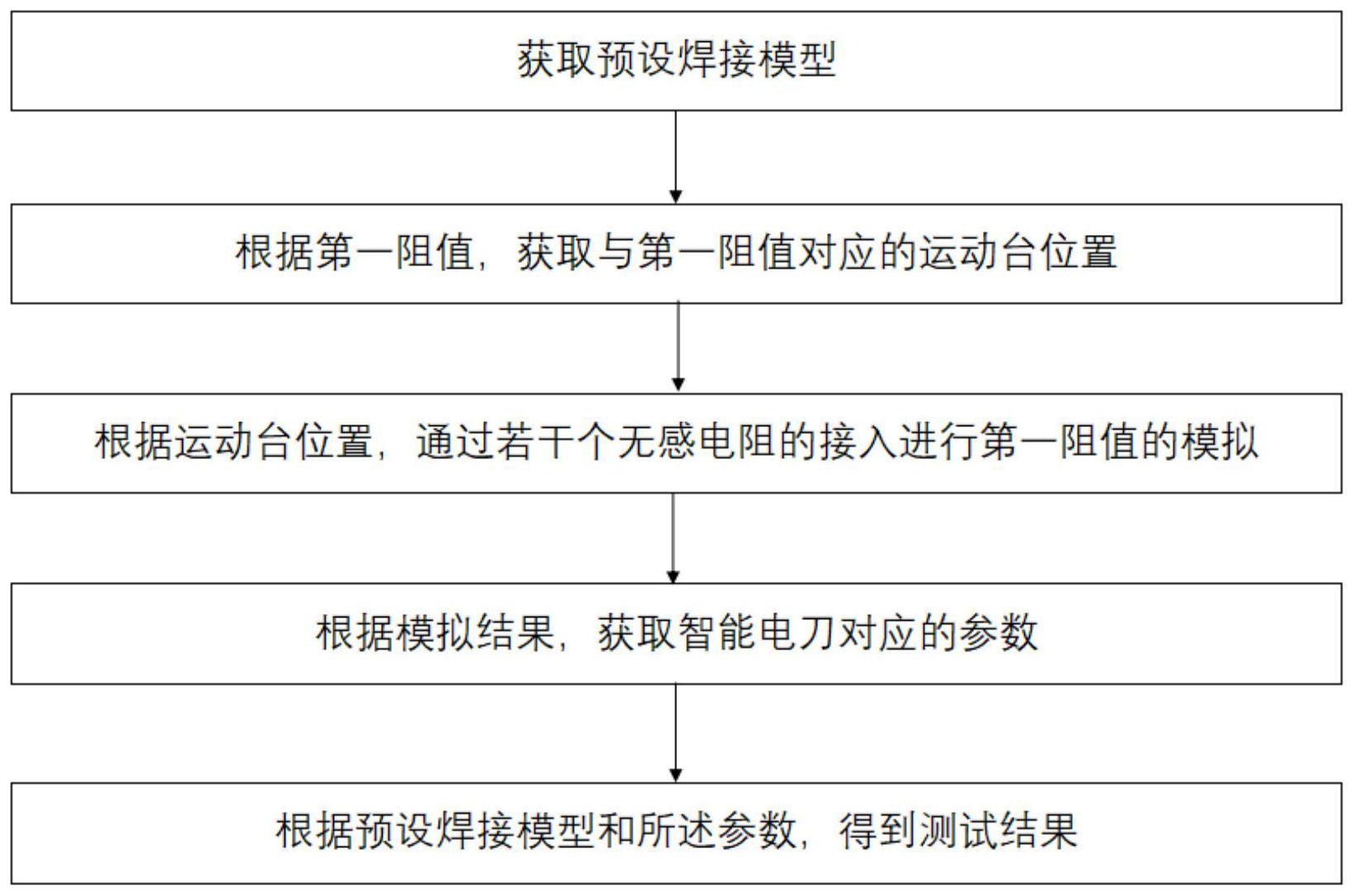
有鉴于此,为了解决上述技术问题,本发明的目的是提供在阻抗发生变化时,能有 效评估智能电刀是否能自动进行调整的一种智能电刀性能的测试方法和装置。 本发明采用的技术方案是:智能电刀性能的测试方法,包括以下步骤: 获取预设焊接模型,其中预设焊接模型包括时间、电压与第一阻值之间的关系; 根据第一阻值,获取与第一阻值对应的运动台位置; 根据运动台位置,通过若干个无感电阻的接入进行第一阻值的模拟; 根据模拟结果,获取智能电刀对应的参数; 根据预设焊接模型和所述参数,得到测试结果; 其中,运动台位置包括使得若干个无感电阻接入导通时可移动的运动台所在的位 置,所述参数包括电压。 进一步,所述根据第一阻值,获取与第一阻值对应的运动台位置的这一步骤,具体 为: 通过运动台的移动,获取第一阻值对应的运动台位置,其中第一阻值包括与单个 无感电阻的阻值大小呈整数倍的阻值。 进一步,所述根据运动台位置,通过若干个无感电阻的接入进行第一阻值的模拟 的步骤中,包括以下步骤: 对预设焊接模型进行重构; 根据第一阻值对重构结果进行划分并进行离散化处理,得到第一阻值与时间变化 的规律; 根据规律和运动台位置,进行第一阻值的模拟; 4 CN 111568533 A 说 明 书 2/8 页 其中第一阻值包括与单个无感电阻的阻值大小呈整数倍的阻值。 进一步,所述根据规律和运动台位置,进行第一阻值的模拟的步骤中,包括以下步 骤: 根据规律和运动台位置,得到若干个位置数据,其中每一位置数据包括运动台位 置和时间; 根据时间和预设变化时间,对每一位置数据进行筛选; 根据筛选结果,得到运动台的移动位置; 通过运动台在移动位置上的移动,模拟得到每一移动位置上对应的第一阻值; 其中,预设变化时间为运动台在相邻的无感电阻中移动的时间。 进一步,所述根据时间和预设变化时间,对每一位置数据进行筛选的步骤中,包括 以下步骤: 获取第一位置数据的第一时间,以及与所述第一位置数据相邻的第二位置数据的 第二时间的第一差值; 当第一差值大于或等于预设变化时间,将所述第二时间变更为所述第二时间与预 设变化时间的差值,并将变更后的第二位置数据作为新的第一位置数据,返回获取第一位 置数据的第一时间,以及与所述第一位置数据相邻的第二位置数据的第二时间的第一差值 的步骤,直至第一时间为位置数据中最小的时间; 当第一差值小于预设变化时间,将第二位置数据排除,重新获取与第一位置数据 的第一时间相邻的第二位置数据的第二时间,返回获取第一位置数据的第一时间,以及与 所述第一位置数据相邻的第二位置数据的第二时间的第一差值的步骤,直至第一时间为位 置数据中最小的时间; 其中,第一时间为最大的时间,第二时间为与第一时间的大小相邻的时间,位置数 据包括第一位置数据和第二位置数据。 进一步,所述根据模拟结果,获取智能电刀对应的参数这一步骤,具体为: 获取在模拟得到的每一移动位置上对应的第一阻值条件下所述智能电刀对应的 参数。 进一步,所述根据预设焊接模型和所述参数,得到测试结果的这一步骤,具体为: 将所述参数和电压与第一阻值之间的关系曲线进行对比,获取相似度; 根据相似度,得到智能电刀的测试结果; 其中,电压与第一阻值之间的关系包括在电压变化时对应的第一阻值的变化曲 线。 本发明还提供智能电刀性能的测试装置,包括: 第一获取模块,用于获取预设焊接模型,其中预设焊接模型包括第一阻值与时间 变化的第一关系,以及电压与时间变化的关系曲线; 第二获取模块,用于根据第一阻值,获取与第一阻值对应的运动台位置; 模拟模块,用于根据运动台位置,通过若干个无感电阻的接入进行第一阻值的模 拟; 第三获取模块,用于根据模拟结果,获取智能电刀对应的参数; 测试模块,用于根据预设焊接模型和所述参数,得到测试结果; 5 CN 111568533 A 说 明 书 3/8 页 其中,运动台位置包括使得若干个无感电阻接入导通时可移动的运动台所在的位 置,所述参数包括电压。 本发明还提供智能电刀性能的测试装置,包括: 至少一处理器; 至少一存储器,用于存储至少一程序; 当所述至少一程序被所述至少一处理器执行,使得所述至少一处理器实现所述智 能电刀性能的测试方法。 本发明还提供存储介质,存储有处理器可执行的指令,其特征在于:处理器执行所 述处理器可执行的指令时执行所述智能电刀性能的测试方法。 本发明的有益效果是:通过预设焊接模型的获取,并根据第一阻值获取与第一阻 值对应的运动台位置,根据运动台位置,通过若干个无感电阻的接入进行第一阻值的模拟, 即通过无感电阻的阻值变化来对第一阻值进行模拟,并根据模拟结果,获取智能电刀对应 的参数,再根据预设焊接模型和所述参数,得到测试结果;即相当于通过无感电阻的阻值变 化对智能电刀实际作用于软组织时时阻抗变化的进行模拟,使得最终的测试结果能够反映 阻值变化时智能电刀对应的参数变化,以对智能电刀的性能进行准确的测试。 附图说明 图1为本发明装置的结构示意图; 图2为本发明装置的结构框图; 图3为本发明方法的步骤流程示意图; 图4为预设焊接模型的示意图; 图5为第一阻值随时间变化的示意图; 图6为运动台位置与第一阻值的关系图。











