
技术摘要:
本发明公开了一种搬运机械手的安全防护方法及其搬运机械手,多位五通阀与第一气体腔之间设有第一常断二通阀,且多位五通阀与第二气体腔之间设有第二常断二通阀;当正常通电通气时,第一常断二通阀和第二常断二通阀均处于通电打开状态,双作用气缸的驱动杆在多位五通阀 全部
背景技术:
随着智能化制造的高速发展和普及推广,搬运机械手在企业实际生产中的应用率 也被认为是衡量体现企业自身智能化制造水平的重要指标。具体来说,在全自动划片机设 备中,搬运工件工序主要依赖于搬运机械手,由于需要搬运的工件非常贵重,因此对搬运机 械手的平稳性和安全性有着极高的要求。 请特别参见图1所示的现有技术中搬运机械手中双作用气缸的外部气体源供给回 路图,在搬运机械手正常工作时(包括正常通电和通气),双作用气缸10’的外部气体源供给 回路包括外部气压源21’,外部气压源21’通过多位五通阀22’通过连接第一排气节流阀24’ 和第二排气节流阀25’选择性向第一气体腔11’和第二气体腔12’注入气体,其驱动杆10a’ 实现选择性上下驱动进而实现对工件的搬运(既需要做水平运动,又要做垂直运动),如果 可以确保设备始终处于正常通电、通气的状态,搬运机械手的安全防护是可以得到保障的。 然而,在实际生产活动中,当搬运机械手在运行的过程中发生意外故障并出现断电、断气 时,双作用气缸10’会携带工件突然失控下坠,严重时会造成工件损坏,甚至发生安全事故。 因此,本申请人基于在搬运机械手进行深入研究后决定提出技术方案来确保搬运 机械手得到安全有效的保护措施。
技术实现要素:
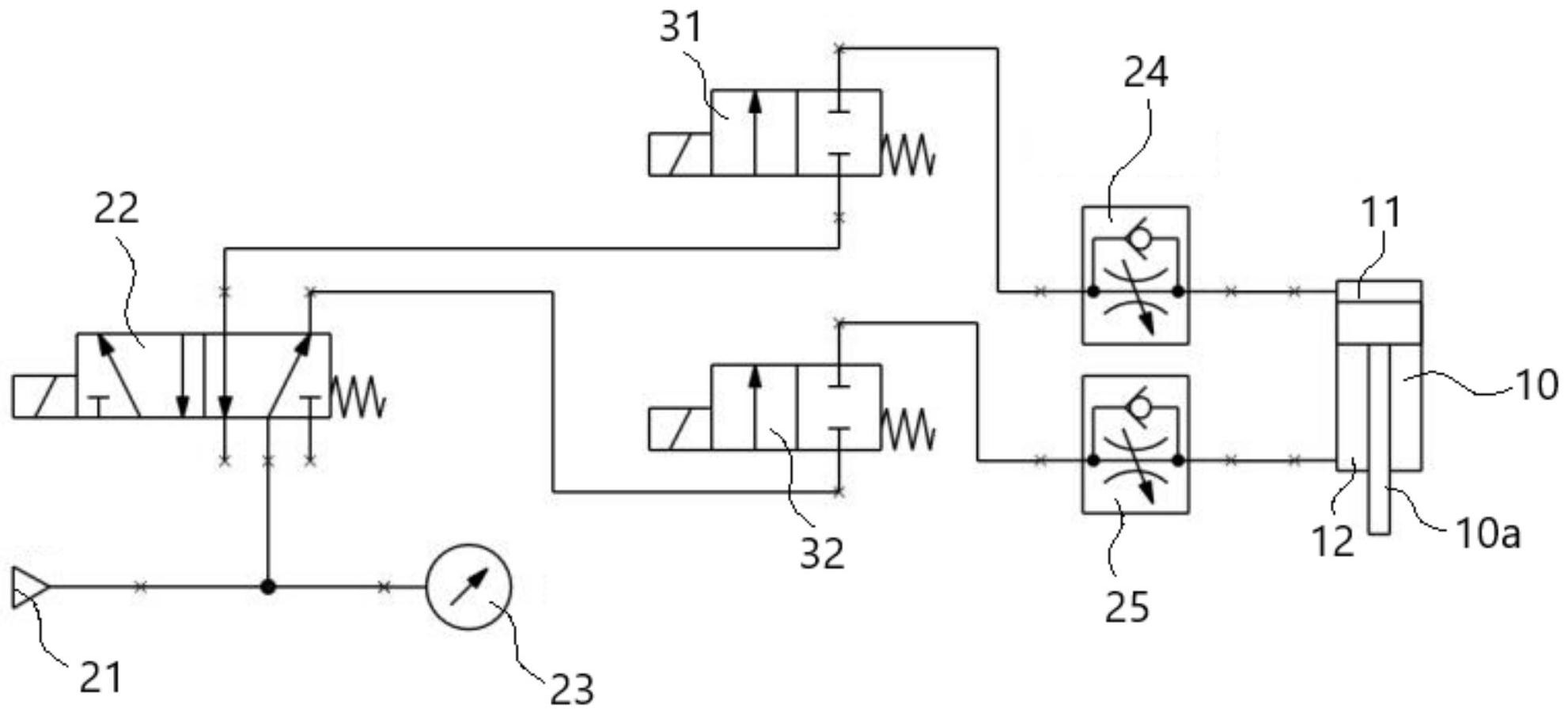
有鉴于此,本发明的目的在于提供一种搬运机械手的安全防护方法及其搬运机械 手,可以消除意外断电或断气时重物掉落的安全隐患,为工件的搬运安全提供了可靠保障。 本发明采用的技术方案如下: 一种搬运机械手的安全防护方法,所述搬运机械手包括双作用气缸,所述搬运机 械手在所述双作用气缸的驱动作用下进行上下升降行程运动,所述双作用气缸的第一气体 腔和第二气体腔之间设有外部气体源供给回路;所述外部气体源供给回路包括外部气压 源,所述外部气压源通过多位五通阀选择性向第一气体腔和第二气体腔注入气压;其中,所 述安全防护方法包括: 所述多位五通阀与所述第一气体腔之间设有第一常断二通阀,且所述多位五通阀 与所述第二气体腔之间设有第二常断二通阀; 当正常通电通气时,所述第一常断二通阀和所述第二常断二通阀均处于通电打开 状态,所述双作用气缸的驱动杆在所述多位五通阀的开关控制下进行垂直升降运动; 当意外断电和/或意外断气时,所述第一常断二通阀和所述第二常断二通阀均处 于断电关闭状态,使得第一常断二通阀、双作用气缸、第二常断二通阀之间形成闭合腔体, 防止第一气体腔和第二气体腔内的气压突变,避免所述搬运机械手携带工件突然下坠。 4 CN 111590642 A 说 明 书 2/5 页 优选地,所述第一常断二通阀与所述第一气体腔之间设有第一排气节流阀,所述 第二常断二通阀与所述第二气体腔之间设有第二排气节流阀。 优选地,所述多位五通阀采用二位五通阀。 优选地,所述外部气压源连接有气压表。 优选地,当正常断电断气时,所述第一常断二通阀和所述第二常断二通阀的断电 时间滞后于所述多位五通阀的断电时间,避免形成闭合腔体,使得搬运机械手复位为初始 状态。 优选地,所述第一常断二通阀和所述第二常断二通阀的断电时间相对所述多位五 通阀的断电时间滞后0.5-3秒。 优选地,一种搬运机械手,包括双作用气缸,所述双作用气缸安装在X轴运动平台 和/或Y轴运动平台上,所述双作用气缸的驱动杆固定安装连接用于定位放置待搬运工件的 工件支撑架,所述搬运机械手采用如上所述的搬运机械手的安全防护方法。 优选地,所述工件支撑架采用吸盘组件,用于定位放置半导体晶圆;所述吸盘组件 与所述驱动杆固定安装连接为一体。 优选地,所述搬运机械手作为全自动划片机设备的搬运机械手。 优选地,一种搬运机械手,包括液压缸,所述搬运机械手在所述液压缸的驱动作用 下进行上下升降行程运动,所述液压缸的第一液压腔和第二液压腔之间采用液压供给回路 驱动,所述液压供给回路包括外部液压源,所述外部液压源通过多位五通阀选择性向第一 液压腔和第二液压腔注入液压;所述多位五通阀与所述第一液压腔之间设有第一常断二通 阀,且所述多位五通阀与所述第二液压腔之间设有第二常断二通阀; 当正常通电通液压时,所述第一常断二通阀和所述第二常断二通阀均处于通电打 开状态,所述液压缸的驱动杆在所述多位五通阀的开关控制下进行垂直升降运动; 当意外断电和/或液压压力低于正常范围时,所述第一常断二通阀和所述第二常 断二通阀均处于断电关闭状态,使得第一常断二通阀、液压缸、第二常断二通阀之间形成闭 合腔体,防止第一液压腔和第二液压腔内的液压突变,避免所述搬运机械手携带工件突然 下坠。 本发明通过创造性地通过在多位五通阀与第一气体腔、第二气体腔之间分别设置 第一常断二通阀和第二常断二通阀,当意外断电和/或意外断气时,第一常断二通阀和第二 常断二通阀均处于断电关闭状态,使得第一常断二通阀、双作用气缸、第二常断二通阀之间 形成闭合腔体,可以有效防止第一气体腔和第二气体腔内的气压突变,最终安全可靠地避 免搬运机械手携带工件突然下坠,而当正常通电通气时,第一常断二通阀和第二常断二通 阀均处于通电打开状态,双作用气缸的驱动杆在多位五通阀的开关控制下进行正常垂直升 降运动,第一常断二通阀和所述第二常断二通阀的设置不会对其造成任何负面影响;本发 明通过结构简易且可进行灵活便捷控制的技术方案消除意外断电或断气时重物掉落的安 全隐患,为工件的搬运安全提供了可靠保障;本发明可以同样应用于具有与外部气体源供 给回路具有类似结构液压供给回路的搬运机械手,同样可以避免液压缸意外断电或液压压 力低于正常范围时重物掉落的安全隐患。 5 CN 111590642 A 说 明 书 3/5 页 附图说明 附图1是现有技术中搬运机械手中双作用气缸的外部气体源供给回路图; 附图2是本发明实施例1中搬运机械手中双作用气缸的外部气体源供给回路图; 附图3是本发明实施例1中搬运机械手的结构示意图。











