
技术摘要:
本发明公开了一种自动化轮毂生产线用机械臂,包括横梁和竖梁,横梁处具有水平导轨和水平齿条,水平导轨处安装有滑座,滑座还与所述竖梁配合安装使得竖梁能够相对于滑座上下滑动;竖梁的底端安装有第三电机和与第三电机配合的第一减速机,第一减速机处连接有第一转动架 全部
背景技术:
轮毂是轮胎内廓轮钢通过立柱连接的轮芯旋转部分,即支撑轮胎的中心装在轴上 的金属部件。又叫轮圈、钢圈、轱辘、胎铃。轮毂根据直径、宽度、成型方式、材料不同种类繁 多。轮毂的生产需要经过铸造、机加工等多个步骤,并且随着智能制造等技术升级,轮毂的 生产越来越趋向于自动化生产,轮毂在生产过程中需要在多个生产线上进行切换,需要执 行轮毂的抓取操作,但是由于轮毂重量大,且在一些环节中温度高,无法进行人工搬运,且 人工搬运效率低,因此需要自动化的机械臂搬运装置。
技术实现要素:
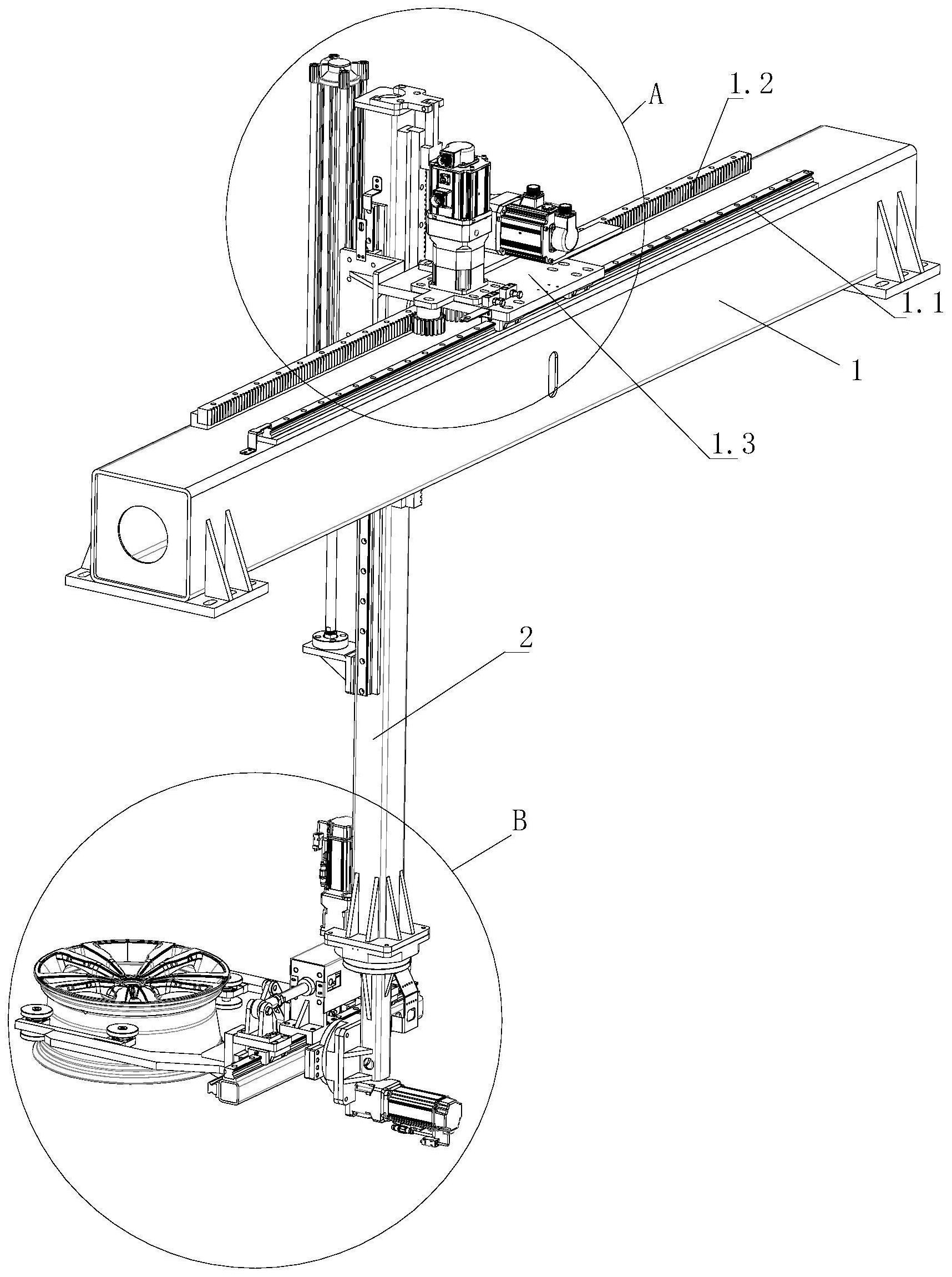
发明目的:本发明旨在克服现有技术的缺陷,提供一种自动化轮毂生产线用机械 臂。 技术方案:一种自动化轮毂生产线用机械臂,包括横梁和竖梁,所述横梁处具有水 平导轨和水平齿条,所述水平导轨处安装有滑座,所述滑座处安装有第一电机,第一电机用 于驱动与所述水平齿条啮合的第一齿轮;所述滑座处还固定有第二电机,第二电机用于驱 动第二齿轮,所述滑座还与所述竖梁配合安装使得所述竖梁能够相对于所述滑座上下滑 动,所述竖梁处具有与所述滑座配合的竖直导轨以及与所述第二齿轮啮合的竖直齿条;所 述竖梁的底端安装有第三电机和与第三电机配合的第一减速机,第一减速机处连接有第一 转动架,所述第一转动架处安装有第四电机和与第四电机配合的第二减速机构,第二减速 机构处连接有第二转动架,所述第二转动架处固定有安装座,所述安装座处安装有滑轨和 伸缩气缸,所述滑轨处具有第一滑块和第二滑块,所述安装座与伸缩气缸的缸体固定,所述 伸缩气缸的活塞杆与第一滑块固定连接,所述安装座处还铰接有转动杆,所述转动杆通过 第一连接杆与第一滑块连接,第一连接杆的一端与转动杆铰接,另一端与第一滑块铰接,所 述转动杆通过第二连接杆与第二滑块连接,第二连接杆的一端与转动杆铰接,另一端与第 二滑块铰接,所述第一滑块处固定有第一夹持臂,所述第二滑块处固定有第二夹持臂。 进一步地,所述转动杆的一端与第一连接杆铰接,另一端与第二连接杆铰接;所述 转动杆的中点与所述安装座铰接。 从而两个夹持臂能实现相同幅度的运动。 进一步地,所述第一夹持臂处和第二夹持臂处均固定有夹紧单元,所述夹紧单元 包括夹紧杆和位于夹紧杆两端的抵紧单元。 进一步地,所述抵紧单元包括上下分布的两个圆盘。 从而利用多个圆盘抵紧夹持轮毂不会对轮毂的表面造成划伤。 进一步地,所述竖梁处还安装有提拉气缸和固定块,所述提拉气缸的顶端与竖梁 的顶端固定连接,所述固定块与提拉气缸的活动端固定连接,所述固定块固定于竖梁的侧 3 CN 111546310 A 说 明 书 2/3 页 面。 提拉气缸用于在竖梁升降时,提供辅助的提拉力,以减小齿条和齿轮的负担。 进一步地,所述第一齿轮具有多个,所述第一电机通过传动机构驱动多个第一齿 轮转动,多个第一齿轮均与所述水平导轨啮合。 从而多个第一齿轮和水平齿条之间啮合,驱动更加稳定,强劲有力。 进一步地,所述横梁的两端还固定有横梁安装支架。从而方便对横梁的安装。 进一步地,所述横梁处固定有多个水平导轨。从而滑座和横梁的配合更加稳定。 有益效果:本发明的机械臂,在运动时,能够实现水平、竖直以及翻转运动,能够夹 持轮毂且不损伤轮毂,并且能够对轮毂进行大范围的搬运、翻转等操作,适用于轮毂生产的 自动化生产线,有效提高了轮毂生产的效率。 附图说明 图1为机械臂第一角度示意图; 图2为A区域放大图; 图3为B区域放大图; 图4为机械臂第二角度示意图; 图5为C区域放大图。











