
技术摘要:
一种基于多层有序网络的脑控智能康复系统运动意图识别方法,被试者通过观看手部握拳与伸展动作视频进行运动想象,同时脑电信号采集设备采集被试者的脑电信号;运动意图识别模块对获得的运动想象信号进行预处理,构建多层有序网络,该多层有序网络能够融合多通道脑电信 全部
背景技术:
脑-机接口(Brain-computer interface,BCI)是一种不依赖于周围神经及肌肉的 信息传输通道,可以将用户的意图转化为指令控制外部设备。运动想象是一种经典的BCI范 式,人在想象肢体运动时,会引起人脑运动感知皮层某一区域的激活,运动感知皮层的激活 会引发皮层电位变化,这种电信号称为运动想象信号。相比于其他常用的BCI范式,比如稳 态视觉诱发电位(SSVEP)和事件相关电位,运动想象不需要特定界面的刺激,是人脑自发想 象形成的,其应用在增强患者康复治疗主动性、改善康复治疗效果方面具有重要的应用价 值。患者通过不停的运动想象以及根据意念配合肢体训练可以反复强化大脑到肌肉群这一 正常运动传导通路,可以提高患者病侧肢体的活动能力。而运动想象信号分类准确率的提 升对于康复效果具有至关重要的作用,基于运动想象的BCI的分类一般包括特征提取和信 号分类两个步骤,提取有效的信号特征可以大幅提高分类准确率。复杂网络是一种新型的 非线性复杂系统分析工具,多个领域成功的例子证明了复杂网络的有效性。大脑极其复杂, 是一个典型的非线性复杂系统,脑电信号具有微弱性、复杂性以及不稳定性的特点,利用复 杂网络对于运动想象信号进行特征提取,能够挖掘其中隐藏的关键信息,提高分类准确率。
技术实现要素:
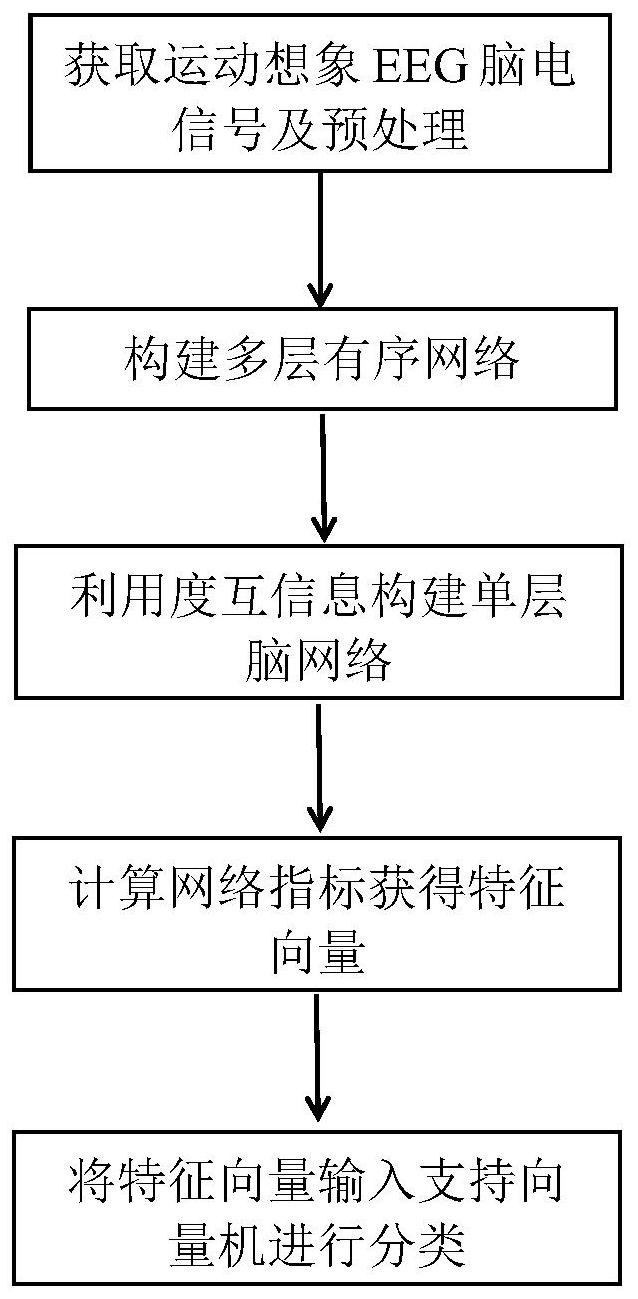
本发明所要解决的技术问题是,提供一种能够帮助上肢运动通路损伤以致于活动 受限的病患进行康复训练的基于多层有序网络的脑控智能康复系统运动意图识别系统。 本发明所采用的技术方案是:一种基于多层有序网络的脑控智能康复系统运动意 图识别系统,被试者通过观看手部握拳与伸展动作视频进行运动想象,同时脑电信号采集 设备采集被试者的运动想象EEG脑电信号;运动意图识别模块对获得的运动想象EEG脑电信 号进行预处理,构建多层有序网络,该多层有序网络能够融合多通道脑电信号,从运动想象 EEG脑电信号中提取符号波动的特征,实现握拳运动想象EEG脑电信号与手部伸展运动想象 EEG脑电信号的有效分类与辨识,将分类结果传输到脑控智能康复系统,脑控智能康复系统 基于所述运动意图协助被试者进行上肢康复训练。 所述的脑控智能康复系统包括:与所述运动意图识别模块相连的主控制器,与所 述主控制器相连的肌电信号采集和多通道电刺激输出模块,所述肌电信号采集和多通道电 刺激输出模块根据主控制器的控制指令对被试者上肢施加电刺激,并将电刺激后的肌电信 号反馈给主控制器,主控制器根据从运动意图识别模块接收的分类结果和电刺激后的肌电 信号生成控制指令,控制肌电信号采集和多通道电刺激输出模块对被试者上肢进行刺激, 帮助被试者进行上肢康复训练。 所述的运动意图识别模块具体包括如下步骤: 5 CN 111584033 A 说 明 书 2/7 页 1)被试者分别观看手部握拳视频与手部伸展视频,同时对视频相应动作进行运动 想象,通过脑电信号采集设备采集被试者握拳运动想象EEG脑电信号和手部伸展运动想象 EEG脑电信号,统称为运动想象EEG脑电信号,并对运动想象EEG脑电信号进行预处理; 2)对预处理后的运动想象EEG脑电信号的每一电极所对应的通道构建有序网络 Ac,得到多层有序网络{AC3,AC4,AF3,AF4,AP3,AP4,AT7,AT8,ACz}; 3)通过度互信息方法将得到的多层有序网络{AC3,AC4,AF3,AF4,AP3,AP4,AT7,AT8,ACz} 转化为一个单层脑网络; 4)提取单层脑网络的六个网络指标,包括:平均聚集系数、全局聚集系数、平均最 短路径长度、谱半径、图能量和平均节点介数; 5)对每个被试者的每一个运动想象EEG脑电信号中的握拳运动想象EEG脑电信号 和手部伸展运动想象EEG脑电信号分别构建单层脑网络,对获得的多个运动想象EEG脑电信 号的单层脑网络分别提取所述的六个网络指标,将每一个单层脑网络的六个网络指标构建 为一个六维特征向量,将握拳运动想象EEG脑电信号的六维特征向量打上标签1,将手部伸 展运动想象EEG脑电信号的六维特征向量打上标签2,将所有的六维的特征向量输入支持向 量机中训练后进行分类; 6)将分类结果传输到脑控智能康复系统对被试者上肢进行刺激。 步骤1)所述的采集被试者握拳运动想象EEG脑电信号和手部伸展运动想象EEG脑 电信号,是通过根据10-20国际标准导联分布的脑电极帽采集C3、C4、F3、F4、P3、P4、T7、T8、 Cz九个电极的脑电信号,并进行预处理,预处理是对运动想象EEG脑电信号进行去伪迹,8- 30Hz的带通滤波,以及去平均,得到能够用于实现运动想象状态辨识的运动想象EEG脑电信 号: 其中Xc,i表示c电极采集的信号中第i个采样点,L表示等长的各电极对应的通道的 长度。 步骤2)包括: (1)对于任一电极采集的的运动想象EEG脑电信号 首先进行相空间重构, 形成L-(d-1)τ个的相空间向量: 其中,c表示电极C3、C4、F3、F4、P3、P4、T7、T8、Cz中的一个电极,Xc,i表示c电极采集 的信号中第i个采样点,L表示等长的各电极对应的通道的长度,u表示第u个相空间向量,d 为嵌入维数,τ为延迟时间,将每一个相空间向量中的元素按照幅值大小进行排序后映射为 一个符号,得到小于等于d!种不同的符号,将每一种符号作为节点,如果两个节点对应相空 间向量之间具有时间上的连续关系,则定义这两个节点之间具有连边,连边无方向,权重为 两种符号之间迁越的次数,从而获得一个单层有序网络; (2)对9个电极采集的运动想象EEG脑电信号 分别重复第(1)步,获得9个单层有序网络,共同组成多层有序网络{AC3,AC4,AF3,AF4,AP3,AP4, AT7,AT8,ACz}。 6 CN 111584033 A 说 明 书 3/7 页 步骤3)包括: 将每一电极对应的通道作为节点,计算多层有序网络{AC3,AC4,AF3,AF4,AP3,AP4,AT7, AT8,ACz}中两两单层有序网络的度互信息,所述单层有序网络R和单层有序网络S的度互信 息IR,S的计算公式如下: 其中,p(k[R])为节点在单层有序网络R具有度k[R]的概率,p(k[S])为节点在单层有 序网络S具有度k[S]的概率,p(k[R],k[S])为节点在单层有序网络R具有度k[R]和在单层有序网 络S具有度k[S]的联合概率; 将所述的两两单层有序网络的度互信息的值作为边的权值,组成单层脑网络。 步骤6)包括: (1)交替播放手部握拳与伸展动作视频,被试者观看视频并进行相应动作的运动 想象,脑电信号采集设备采集被试者运动想象EEG脑电信号; (2)运动意图识别模块对运动想象EEG脑电信号进行预处理,通过构建多层有序网 络提取信号特征并进行信号辨识,得到被试者的运动意图并传输到主控制器; (3)肌电信号采集和多通道电刺激输出模块中的若干肌电信号采集点采集被试者 上肢肌肉的肌电信号,并传输到主控制器; (4)主控制器根据运动意图识别模块得到的被试者的运动意图,结合上肢肌肉的 肌电信号,决策出刺激电流、刺激脉宽、刺激频率和刺激时间,控制肌电信号采集和多通道 电刺激输出模块中的若干电刺激点; (5)根据主控制器指令,若干电刺激点对运动意图所对应的上肢多块肌肉施加电 刺激,使被试者按想象意图进行手部握拳或伸展运动。 本发明的基于多层有序网络的脑控智能康复系统运动意图识别系统,通过构建多 层有序网络对握拳运动想象EEG脑电信号和手部伸展运动想象EEG脑电信号进行辨识。首先 对运动想象EEG脑电信号进行预处理,然后构建多层有序网络,该多层有序网络可以实现运 动想象EEG脑电信号特征的有效提取和辨识,并转化为指令控制脑控智能康复系统,帮助上 肢运动通路损伤以致于活动受限的病患进行康复训练,逐渐恢复他们的活动能力,促进基 于运动想象的BCI在康复医疗中的应用。 附图说明 图1是本发明中运动意图识别模块的流程图; 图2是本发明中单次运动想象EEG脑电信号采集时序图; 图3是本发明基于多层有序网络的脑控智能康复系统运动意图识别系统的框图; 图4是本发明中便携式脑电采集设备的框图; 图5是本发明中肢体功能性电刺激设备的结构示意图; 图6是本发明中肌电信号采集和多通道电刺激输出模块的示意图。 图中 1:脑电信号采集设备 2:运动意图识别模块 3:脑控智能康复系统 3.1:主控制器 7 CN 111584033 A 说 明 书 4/7 页 3.2:肌电信号采集和多通道电刺激输出模块 3.2.1:电刺激点 3.2.2:肌电信号采集点











