
技术摘要:
本发明涉及一种空地协同的农业机器人精准施药方法及系统。本发明采用无人机遍历检测,运用图像处理技术对农作物的病虫草害情况进行识别,对整片农田病虫草害区进行了识别定位;地面机器人根据无人机识别出的病虫草害位置自动规划最佳的行进路径,减少了地面机器人的运 全部
背景技术:
目前,精准农业已经成为了当今世界农业发展的新潮流。我国目前农业机械化水 平相对较低,我国农业航空的作业面积仅占耕地总面积的2.6%左右,而在欧美等农业航空 发达国家则航空作业面积占到了30%~50%。我国农业农药投入水平高,传统式喷洒农药 对无病虫草害的作物具有危害作用,造成农药残存,使得农作物品质下降,对人体健康造成 危害。并且传统的施药方式使得这些农药在作物上的分布极不均匀,绝大多数农药喷洒在 了无病虫草害的农作物上,使得农产品的农药残留量增加,导致了农产品质量下降,人们的 健康以及环境都受到威胁等问题。农业操作如喷洒农药、病虫草害检测十分繁琐,特别是当 喷洒农药时会采取过多的预防措施,如穿合适的衣服、戴口罩和手套等,这些措施可以较大 程度避免农药对他们造成伤害,但也不能完全避免。因此,在这样的情况下,使用精准施药 机器人给出了最好的解决方案。精准施药通过图像处理技术、遥感技术、传感器探测技术、 机电一体化技术、导航技术等多种现代化技术与方法来实现,精准喷洒农药可以有效的提 高农药利用率,减少农药残存,对人类健康以及环境保护都具有重要意义。而目前一种高效 率,精准的全自动施药方法还没有成型,因此,设计一种既高效又能精准喷洒农药的方法具 有重要意义。
技术实现要素:
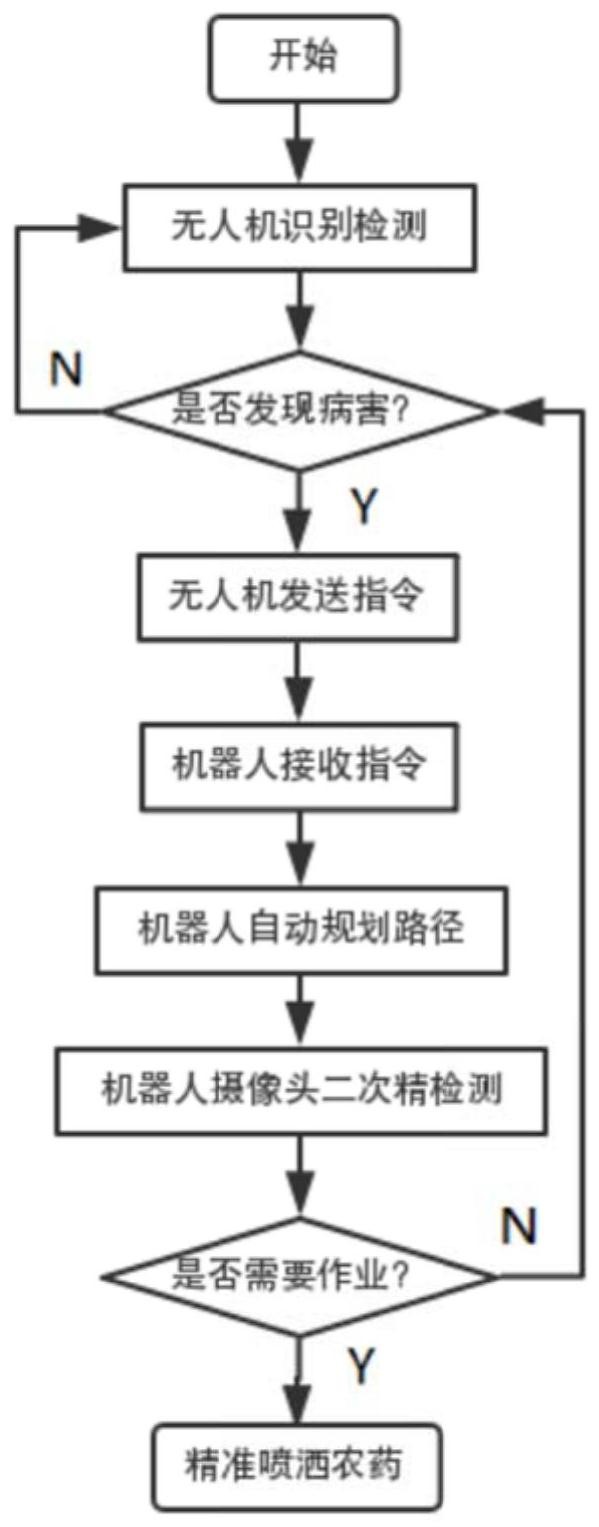
针对上述技术问题,本发明的目的是提供一种空地协同的农业机器人精准施药方 法及系统,提高施药精度,增大农药使用效率,有效降低农药残留。 为了实现上述目的,本发明提供了如下技术方案: 一种空地协同的农业机器人精准施药方法,利用空地协同的农业机器人精准施药 系统,所述系统包括无人机1和地面机器人6;其中,所述无人机1上设有空中视觉相机2,用 于获取无人机1下方的作物图像信息;所述地面机器人6的前端通过一竖直设置的视觉相机 支架4安装有地面视觉相机3;地面机器人6的后端设有施药执行器7;无人机1上搭载微处理 器,地面机器人6上搭载有工控机5;所述施药执行器7装载有多种病虫草害农药;空中视觉 相机2包括多光谱相机和热红外传感器。 所述方法包括如下步骤: S1、无人机识别检测 无人机1在大田上空遍历飞行,飞行过程中,通过空中视觉相机2实时采集大田农 作物图像信息,空中视觉相机2的多光谱相机采集作物在不同波段下的光谱图像,并传输至 微处理器;同时,热红外传感器获取作物表面的温度信息,并传输至微处理器; 微处理器提取多光谱相机采集的光谱图像的光谱特征,并将热红外传感器采集的 4 CN 111543413 A 说 明 书 2/4 页 温度信息通过光电转换、电信号处理手段将作物的温度分布图像转换为视频图像后提取温 度特征,然后将提取的光谱特征和温度特征与正常农作物特征进行对比,建立当地病虫草 害信息库,通过信息变化反推农作物病虫草害情况,当发现农作物存在病虫草害时,无人机 微处理器与地面机器人6的工控机5通讯,向工控机5发送存在病虫草害的农作物的位置信 息; S2、地面机器人规划路线 地面机器人6的工控机5根据无人机1的微处理器发送的存在病虫草害的农作物的 位置信息,规划地面机器人6依次行驶至存在病虫草害的农作物的所在位置的最短路径; S3、地面机器人二次精检测进行作业决策 地面机器人6根据工控机5规划的路径行进,当地面机器人6到达存在病虫草害的 农作物的所在位置时,地面视觉相机3开启,对该位置的大田农作物进行二次检测,地面视 觉相机3将获取农作物图像信息发送至工控机5,工控机5对农作物图像信息进行处理,图像 信息经处理后,与系统中的病虫草害库进行信息特征对比,其中包括颜色信息、形态信息等 多特征比较分析,从而判断该位置的大田农作物所患病虫草害的类型信息,并决策是否需 要施药作业,如果该位置的大田农作物不需要施药作业,地面机器人6行进至下一个存在病 虫草害的农作物的所在位置;如果该位置的大田农作物需要施药作业,判断出农作物所患 病虫草害的类型信息,地面机器人6的施药执行器7根据农作物所患病虫草害的类型喷洒相 应的农药,从而对农作物病虫草害精准施药。 步骤S1中,在无人机1遍历整片大田后,微处理器通过对多光谱相机遍历拍摄的图 像进行数字拼接处理,从而形成大田遥感地图。 步骤S2中,当工控机5收到无人机1的微处理器发送的新的存在病虫草害的农作物 的位置信息时,重新规划地面机器人6依次行驶至存在病虫草害的农作物的所在位置的最 短路径。 一种空地协同的农业机器人精准施药系统,包括无人机1和地面机器人6;其中,所 述无人机1上设有空中视觉相机2,用于获取无人机1下方的作物图像信息;所述地面机器人 6的前端通过一竖直设置的视觉相机支架4安装有地面视觉相机3;地面机器人6的后端设有 施药执行器7;无人机1上搭载微处理器,地面机器人6上搭载有工控机5;所述施药执行器7 装载有多种病虫草害农药;空中视觉相机2包括多光谱相机和热红外传感器。 所述地面视觉相机3通过相机安装罩33、固定连接件32和紧固螺钉拍摄角度可调 地安装在视觉相机支架4上;所述固定连接件32高度可调地固接在视觉相机支架4上,地面 视觉相机3固接在相机安装罩33内,所述相机安装罩33与固定连接件32的连接部开有四分 之一圆周的弧形调节槽31。 通过调节紧固螺钉对相机的拍摄角度进行九十度范围的调整。 与现有技术相比,本发明的有益效果在于: (1)本发明自动化程度高,大大降低人工工作强度。 (2)本发明通过精准施药,增大农药使用效率,有效降低农药残留。 (3)本发明采用无人机遍历检测,运用图像处理技术对农作物的病虫草害情况进 行识别,对整片农田病虫草害区进行了识别定位;地面机器人根据无人机识别出的病虫草 害位置自动规划最佳的行进路径,减少了地面机器人的运动行程,施药效率高。 5 CN 111543413 A 说 明 书 3/4 页 (4)本发明对病虫草害所在位置进行二次精检测,当地面机器人行进至无人机识 别的病虫草害所在位置时,机器人自带视觉相机识别农作物,对农作物进行二次检测,并且 具体判断出农作物所患病虫草害的具体类型,例如该处农作物患有某种病害,解决了对农 作物病虫草害精确识别的问题,从而实现对农作物病虫草害精准施药。 (5)本发明可实时产生大田的遥感图,有利于大田的作物的产量,病虫草害等信息 的统计和管理。 附图说明 图1为本发明的空地协同精准施药系统的组成示意图; 图2为本发明的地面视觉相机3的安装示意图; 图3为本发明的无人机1及地面机器人6的运动路径示意图; 图4为本发明的空地协同的农业机器人精准施药方法的流程图。 其中的附图标记为: 1 无人机 2 空中视觉相机 3 地面视觉相机 4 视觉相机支架 5 工控机 6 地面机器人 7 施药执行器 31 弧形调节槽 32 固定连接件 33 相机安装罩











