
技术摘要:
本发明公开了一种基于缺陷导向多点定位神经网络的芯片表面缺陷自动检测方法及系统,主要包括预处理部分、模型训练部分和实时检测部分,构建的缺陷导向多点定位神经网络包括缺陷定位子网络、缺陷裁剪模块、缺陷放大模块和缺陷标记子网络;本发明利用缺陷导向多点定位神 全部
背景技术:
自从21世纪以来,集成芯片产业高速发展,但因生产技术复杂、过程繁复,所以在 芯片制造的各个环节中对芯片进行缺陷检测,过滤掉存在缺陷的产品,保证成品的可靠性, 同时找出芯片生产过程中的工艺缺陷,便于及时改进。于是,芯片表面缺陷检测也成为了整 个芯片产业中的一个重要领域。 在以往的芯片表面检测中,往往采用的是人工肉眼抽检,该检测方法有着检测实 时性差、检测成功率低等缺点。随着芯片生产规模的扩大,传统的人工肉眼检测显然不适应 现代的工业生产需求。 因此,正是在此背景下,将芯片表面缺陷检测和深度学习相结合,利用深度神经网 络对芯片表面图像进行特征提取与识别,最终实现芯片表面不同宏观缺陷的检测和分类。
技术实现要素:
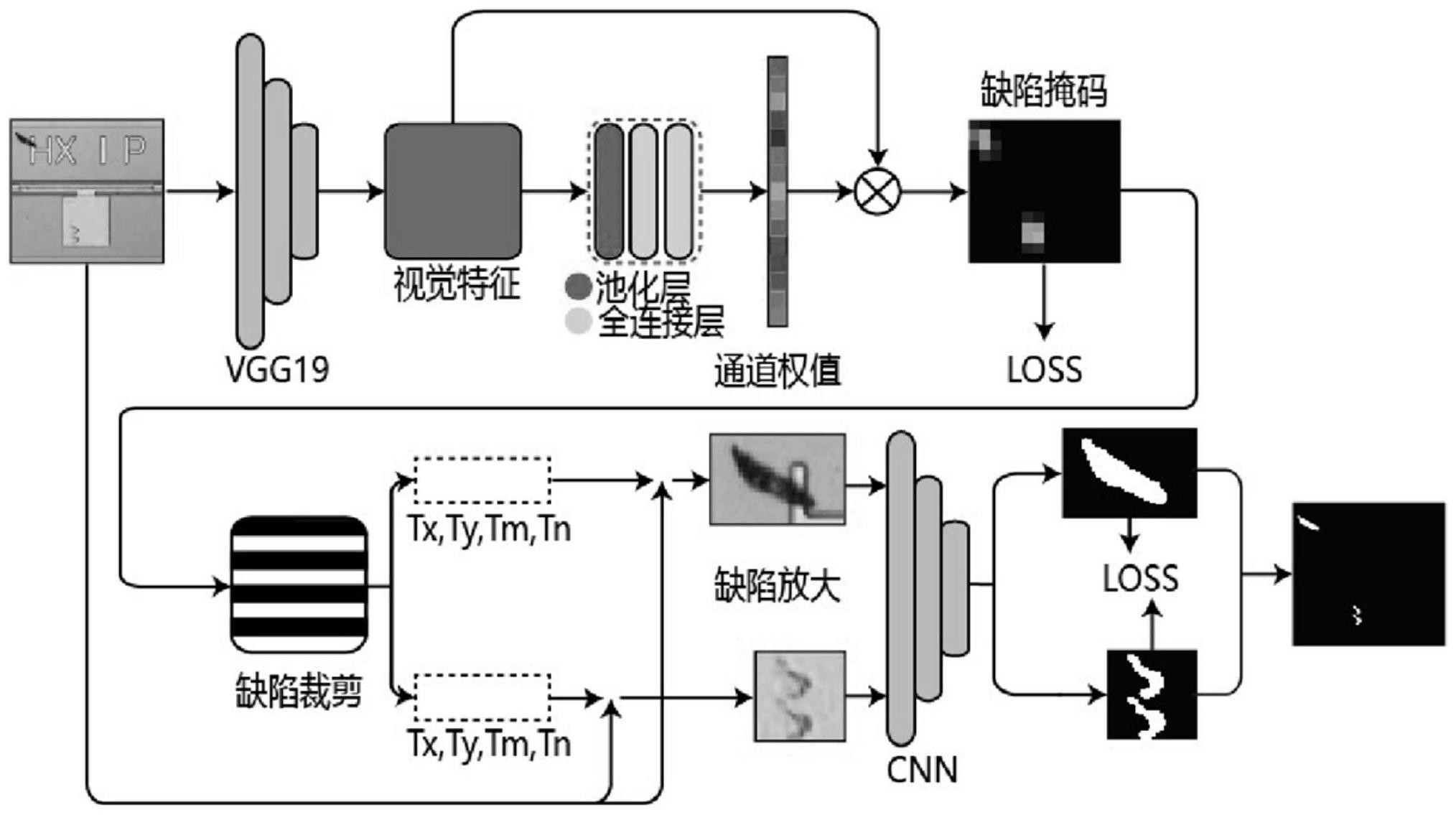
基于现有的缺陷检测和深度学习技术,本发明提供了一种基于缺陷导向多点定位 神经网络的芯片表面缺陷自动检测方法及系统。 为了达到上述发明目的,本发明采用以下技术方案: 一方面,本申请提出了一种基于缺陷导向多点定位神经网络的芯片表面缺陷自动 检测方法,该方法包括以下步骤: (1)样本采集:使用环形白炽灯对目标芯片进行照明,使用工业摄像头进行图像采 集,获取若干目标芯片彩色图像。 (2)样本预处理:进行图像缩放、图像滤波、图像光照矫正、图像倾斜矫正、芯片框 选操作,得到预处理图像集。 (3)构造训练集:将预处理后的芯片图像人工标上标签;创建一张与芯片图像相同 大小的二值图,黑色为背景色,缺陷由白色标出,作为芯片原图标签;复制二值图,缩放到14 ×14大小,作为缺陷掩码标签。 (4)构建缺陷导向多点定位神经网络,该网络包括缺陷定位子网络、缺陷裁剪模 块、缺陷放大模块和缺陷标记子网络; 缺陷定位子网络:基于VGG19实现,将缩放为224×224×3的芯片图像作为VGG19的 输入,首先使用VGG19最后一层卷积层输出作为提取的视觉特征,即提取出14×14×512维 视觉特征,然后再使用全局平均池化将视觉特征转化为1×1×512维视觉映射,再使用两个 512×512的全连接层将视觉映射转化为512维视觉特征通道权值,并利用该通道权值将视 觉特征加权求和,合并视觉特征中512个通道,使14×14×512维视觉特征转化为14×14维 5 CN 111598856 A 说 明 书 2/7 页 缺陷掩码。 缺陷裁剪模块:将14×14维缺陷掩码作为输入,利用图像阈值分割、形态学处理、 轮廓提取、外接矩形计算将缺陷掩码映射为若干缺陷检测窗口,利用缺陷检测窗口从原图 上截取缺陷矩形图。 缺陷放大模块:将截取的缺陷矩形图放大至四倍边长。 缺陷标记子网络:该子网络包含四个卷积层和两个池化层,第一层是卷积核为3× 3×32的卷积层,第二层是卷积核为3×3×16的卷积层,第三层是2×2的池化层,第四层是 卷积核为3×3×8的卷积层,第五层是卷积核为3×3×1的卷积层,第六层是2×2的池化层; 将放大后的缺陷矩形图作为输入,输出缺陷标记图像;将缺陷标记图像对应缺陷检测窗口 复制到与原图相同大小的黑色图像上,得到完整芯片缺陷标记图。 (5)模型训练:利用步骤(3)构造的训练集对步骤(4)构建的缺陷导向多点定位神 经网络进行训练,得到训练后的神经网络模型。 (6)缺陷检测:将待测试芯片图像输入训练好的模型中,获得缺陷数量、缺陷类型、 缺陷位置以及缺陷尺寸信息,完成芯片表面缺陷检测。 进一步地,所述步骤(2)具体为:首先通过中值滤波算法对芯片图像进行噪声抑 制,然后通过多尺度Retinex算法对芯片图像进行光照校正,接着使用Hough变换法对芯片 图像进行倾斜校正,继续使用阈值分割和腐蚀、膨胀操作将芯片图像转化为二值图,最后使 用Suzuki轮廓跟踪算法将芯片从背景中分割出来并调整为方形。 进一步地,所述缺陷裁剪模块的实现具体为:首先通过阈值分割将缺陷掩码二值 化,然后使用Suzuki轮廓跟踪算法标记出缺陷掩码中的缺陷轮廓,接着使用Sklansky算法 求出轮廓点集的凸包,最后使用旋转卡尺算法求出缺陷的最小外接矩形,根据该最小外接 矩形的四个顶点,再做最小外接矩形,得到无偏转的矩形框,按照最小外接矩形在缺陷掩码 中的位置,等比放大到芯片原图中,即得到芯片原图中缺陷的最小外接矩形,称这个最小外 接矩形为缺陷检测窗口,用[Tx,Ty,Tm,Tn]表示,其中Tx、Ty表示缺陷检测窗口左上角位置 坐标,Tm、Tn表示矩形窗口边长。 进一步地,所述缺陷放大模块中,将芯片原图按照缺陷检测窗口裁剪下来的缺陷 矩形图用双线性插值法放大至四倍边长。 进一步地,所述步骤(5)中模型训练具体为: 通过优化以下损失函数来训练缺陷定位子网络: 其中,M*表示人工标定的缺陷掩码,M表示缺陷定位子网络最终输出的缺陷掩码,n 为掩码中像素总数。 通过优化以下损失函数来训练缺陷标记子网络: 其中,P j*i 表示按照缺陷检测窗口从人工标定的芯片原图标签中截取的第j个缺陷 6 CN 111598856 A 说 明 书 3/7 页 区域标签,P ji 表示缺陷标记子网络输出的第j个缺陷标记图像,nj为第j个缺陷区域像素总 数,m为缺陷数。 进一步地,依靠缺陷检测窗口可以知道缺陷的个数和位置;依靠对完整芯片缺陷 标记图使用缺陷裁剪模块中相同的轮廓检测方法,可以知道缺陷的类型和尺寸。 进一步地,所述缺陷导向多点定位神经网络模型放大了高度局部的缺陷区域,从 一个更精细的大尺度角度去观察缺陷,从而更准确的识别出缺陷的类型和尺寸;该模型不 局限于特定芯片;该模型考虑多种因素,综合考量一颗芯片是否达到合格标准。 另一方面,本申请还提出了一种基于缺陷导向多点定位神经网络的芯片表面缺陷 自动检测系统,该系统包括: 样本采集单元:使用环形白炽灯对目标芯片进行照明,使用工业摄像头进行图像 采集,获取若干目标芯片彩色图像。 样本预处理单元:进行图像缩放、图像滤波、图像光照矫正、图像倾斜矫正、芯片框 选操作,得到预处理图像集。 训练集构造单元:将预处理后的芯片图像人工标上标签;创建一张与芯片图像相 同大小的二值图,黑色为背景色,缺陷由白色标出,作为芯片原图标签;复制二值图,缩放到 14×14大小,作为缺陷掩码标签。 缺陷导向多点定位神经网络构建单元,该单元包括缺陷定位子网络模块、缺陷裁 剪模块、缺陷放大模块和缺陷标记子网络模块; 缺陷定位子网络模块:缺陷定位子网络基于VGG19实现,将缩放为224×224×3的 芯片图像作为VGG19的输入,首先使用VGG19最后一层卷积层输出作为提取的视觉特征,即 提取出14×14×512维视觉特征,然后再使用全局平均池化将视觉特征转化为1×1×512维 视觉映射,再使用两个512×512的全连接层将视觉映射转化为512维视觉特征通道权值,并 利用该通道权值将视觉特征加权求和,合并视觉特征中512个通道,使14×14×512维视觉 特征转化为14×14维缺陷掩码。 缺陷裁剪模块:将14×14维缺陷掩码作为输入,利用图像阈值分割、形态学处理、 轮廓提取、外接矩形计算将缺陷掩码映射为若干缺陷检测窗口,利用缺陷检测窗口从原图 上截取缺陷矩形图。 缺陷放大模块:将截取的缺陷矩形图放大至四倍边长。 缺陷标记子网络模块:缺陷标记子网络包含四个卷积层和两个池化层,第一层是 卷积核为3×3×32的卷积层,第二层是卷积核为3×3×16的卷积层,第三层是2×2的池化 层,第四层是卷积核为3×3×8的卷积层,第五层是卷积核为3×3×1的卷积层,第六层是2 ×2的池化层;将放大后的缺陷矩形图作为输入,输出缺陷标记图像;将缺陷标记图像对应 缺陷检测窗口复制到与原图相同大小的黑色图像上,得到完整芯片缺陷标记图。 模型训练单元:利用训练集对缺陷导向多点定位神经网络进行训练,得到训练后 的神经网络模型。 缺陷检测单元:将待测试芯片图像输入训练好的模型中,获得缺陷数量、缺陷类 型、缺陷位置以及缺陷尺寸信息,完成芯片表面缺陷检测。 此外,本申请还提出了一种计算机设备,包括存储器、处理器以及存储在存储器上 并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述方法的步 7 CN 111598856 A 说 明 书 4/7 页 骤。 本申请还提出了一种计算机可读存储介质,其上存储有计算机程序,所述计算机 程序被处理器执行时实现上述方法的步骤。 本发明与现有技术相比,本发明的有益效果是:本发明利用缺陷导向多点定位神 经网络实现芯片表面缺陷检测,通过缺陷导向多点定位神经网络对芯片表面缺陷进行定 位、裁剪、放大、标记、识别,提高了芯片表面缺陷检测的准确率,并且做到对芯片进行实时 检测,对比人工检测,大大缩短了检测时间,提高了检测效率。 附图说明 图1是本发明实施例的缺陷导向多点定位神经网络的训练流程图; 图2是本发明实施例的缺陷导向多点定位神经网络的测试流程图; 图3是本发明实施例的缺陷导向多点定位神经网络的结构图。











