
技术摘要:
本发明涉及餐饮设备技术领域,涉及一种无人餐馆餐具智能收集整理装置及收集整理方法,装置包括支撑台,支撑台上方设有送餐机器人跑道,支撑台两侧设有餐桌,支撑台内设有餐具回收腔;餐桌下方设有第一电动升降杆,餐桌内放置腔腔底设有第二电动升降杆,第二电动升降杆 全部
背景技术:
随着居民收入的不断提高,居民消费观念、生活方式的变化和休闲时间的增多,越 来越多的居民选择外出就餐,从社区的居民到工作繁忙的上班族、学业紧张的学生族,都倾 向于外出解决饮食问题。城市化进程推进过程中,不断增加的流动人口,由于其收入往往处 于中低水平或者时间紧迫,也加入到在外就餐的队伍,构成了大众化餐饮庞大的潜在顾客 群。同时,外出就餐也成为居民的亲友聚会的一种休闲娱乐方式。因此,在人流高峰的时候, 就餐问题十分突出,常常表现为食物不能及时送到,员工人手不足,等待时间较长,管理混 乱的问题。 目前的无人餐厅中,往往通过送餐机器人来实现送餐,但是顾客就餐完成后,餐具 的收集和桌面的清洁整理仍然需要人工处理,十分麻烦。
技术实现要素:
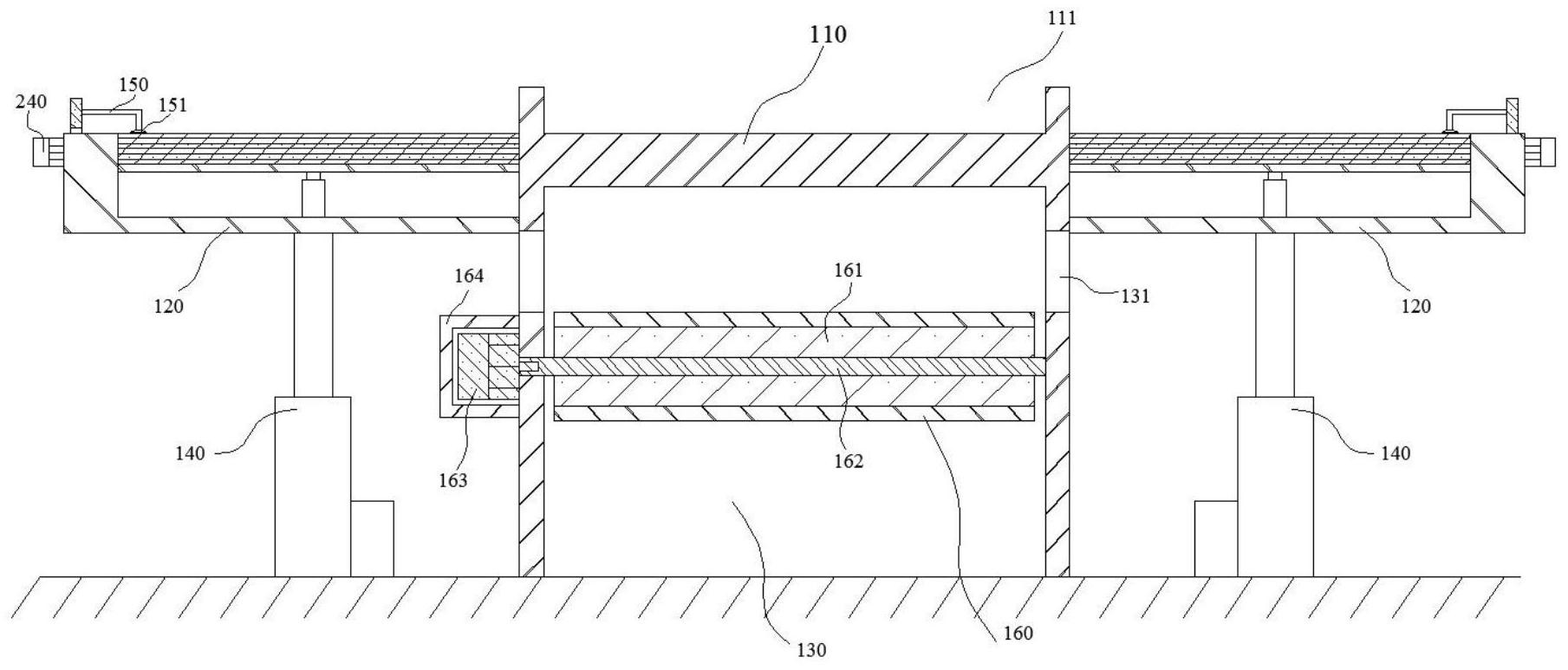
本发明的内容是提供一种无人餐馆餐具智能收集整理装置及收集整理方法,其能 够克服现有技术的某种或某些缺陷。 根据本发明的一种无人餐馆餐具智能收集整理装置,其包括支撑台,支撑台上方 设有送餐机器人跑道,支撑台两侧设有多个餐桌,支撑台内设有餐具回收腔;任一餐桌下方 均设有第一电动升降杆,餐桌内设有上方和内侧开口的放置腔,放置腔腔底设有第二电动 升降杆,第二电动升降杆顶端设有支撑板,支撑板上方堆叠有多个餐板,餐板的大小与放置 腔大小相同,餐桌内侧和餐板内侧均贴在支撑台对应侧面上;餐桌前后端均设有直线引动 器,直线引动器包括可内外移动的丝杆螺母,丝杆螺母固定连接有连接杆,连接杆从直线引 动器前后端伸出后向上延伸,两个连接杆顶端中间固定连接有一移动板,移动板内侧安装 有L状的伸长杆,伸长杆底端设有吸盘,吸盘贴在位于顶端的餐板上; 餐具回收腔内设有传送带,餐具回收腔侧壁上设有用于餐桌穿过的方孔,方孔底 面与传送带顶面平齐。 支撑台两侧设有多个餐桌,送餐机器人可以通过送餐机器人跑道将食物送到预定 的餐桌前,然后顾客取下放在餐板上。 第一电动升降杆的设置使得餐桌可以升降调节,方便顾客就餐。第一电动升降杆 可以将餐桌降低,使位于顶端的餐板与方孔对齐。 直线引动器能够带动连接杆内外移动,连接杆中间连接有移动板,移动板内侧安 装有L状的伸长杆,伸长杆底端设有吸盘,这样,吸盘能随直线引动器内外移动,吸盘能够吸 住位于顶端的餐板,这样,当位于顶端的餐板与方孔对齐时,直线引动器能将餐板穿过方孔 移动到传送带上,传送带可将餐板传送到厨房。这里,移动板的设置能防止餐板的餐具在移 4 CN 111591755 A 说 明 书 2/5 页 动时从外侧掉落;吸盘能够将餐板向上吸起一点距离,这样,顶端的餐板移动时与下面的餐 板不易摩擦,方便顶端的餐板移动到传送带上;餐桌内侧和餐板内侧均贴在支撑台对应侧 面上,放置腔腔壁和支撑台侧壁对餐板具有支撑作用,使得餐板不易被顾客压起,而且,吸 盘具有一定的压板能力,进一步提高餐板的稳定性;连接杆从直线引动器前后端伸出后向 上延伸,这样,连接杆的穿出的孔在前后端,不易进水进尘,直线引动器得到了较佳的保护。 本装置能够将餐板和餐板上的餐具一并收回到厨房,并由下一个餐板补位,餐具 的收集和餐桌的整理清洁均十分方便,不用人工收餐具,也不用人工整理清洁餐桌,提高了 就餐的效率。 第二电动升降杆的设置使得所述多个餐板可以上升,当顶端的餐板被移走后,第 二电动升降杆可以上升一段距离,将下一个餐板补位。 作为优选,餐桌前后端均设有挡罩,挡罩顶面设有用于连接杆移动的长孔。 挡罩的设置能防止顾客贴近直线引动器,增加固定用餐的安全性。 作为优选,伸长杆上固定有气管,吸盘通过所述气管与一真空泵连接。 真空泵能通过气管使吸盘内变真空,使吸盘能够稳定的吸住餐板。 作为优选,传送带套在多个滚柱上,任一滚柱固定套在转轴上,转轴两端分别转动 连接在餐具回收腔对应腔壁上,转轴一端伸出餐具回收腔对应腔壁后与一第一电机连接, 第一电机位于一保护盒内,保护盒安装在两个餐桌中间的下方。 第一电机驱动转轴转动,从而带动滚柱转动,实现传送带的传动,保护盒能保护第 一电机,保护盒安装在两个餐桌中间的下方,这样,第一电机的安装位置不会影响顾客就 餐。 作为优选,直线引动器内设有安装腔,安装腔内外端之间连接有丝杆,丝杆螺母套 在丝杆上,丝杆外端穿出安装腔后与一第二电机连接,安装腔前后侧设有移动孔,连接杆从 所述移动孔穿出且卡在所述移动孔上。 第二电机驱动丝杆,使丝杆螺母具有转动的趋势,但与丝杆螺母固定连接的连接 杆被所述移动孔挡住,所以,丝杆螺母和连接杆做直线运动。 作为优选,移动板的高度小于方孔的高度,移动板位于最外端时,移动板到餐板的 距离不小于方孔外口到传送带的距离。 移动板的高度小于方孔的高度,这样,能防止移动板碰到方孔顶壁;移动板位于最 外端时,移动板到餐板的距离不小于方孔外口到传送带的距离,这样,移动板到达方孔外口 时,也就是直线引动器驱动连接杆到最内侧时,餐板能整个放在传送带上。 作为优选,支撑台一端与厨房连接,送餐机器人跑道和餐具回收腔均与厨房相通。 送餐机器人跑道和餐具回收腔均与厨房相通,这样,送餐机器人跑道能将食物从 厨房送到餐桌旁,然后返回厨房;餐具回收腔中的传动带能将餐板和餐具传送回厨房。 作为优选,放置腔腔口前后侧设有挡条。 挡条的设置能够防止餐具从前后侧离开餐板。 作为优选,放置腔内侧竖直设有挡杆,所述多个餐板内端设有卡槽,所述卡槽与挡 杆对应配合,挡杆的高度与一个餐板的高度之和等于放置腔的高度。 挡杆和卡槽的配合能保证所述多个餐板在放置腔内的稳定性。 本发明还提供了一种无人餐馆餐具智能收集整理方法,其采用上述的一种无人餐 5 CN 111591755 A 说 明 书 3/5 页 馆餐具智能收集整理装置,并包括以下步骤: 一、就餐完毕后,第一电动升降杆下降,将位于顶端的餐板的底面与方孔底面对 齐; 二、控制吸盘吸住餐板顶面的外端,然后控制直线引动器移动位于顶端的餐板穿 过方孔并到达传送带上,松开吸盘,餐板落在传送带上; 三、传送带将餐板传送至厨房; 四、直线引动器带吸盘返回,返回到原来位置后,第二电动升降杆上升,将下一个 餐板升起,将下一个餐板贴在吸盘下方; 五、第一电动升降杆上升到原来位置,准备下一位顾客就餐。 本方法能够将餐板和餐板上的餐具一并收回到厨房,并由下一个餐板补位,餐具 的收集和餐桌的整理清洁均十分方便,不用人工收餐具,也不用人工整理清洁餐桌,省时省 力,提高了就餐的效率。 附图说明 图1为实施例1中一种无人餐馆餐具智能收集整理装置的结构示意图; 图2为实施例1中餐桌的结构示意图; 图3为实施例1中餐桌的右视结构示意图; 图4为实施例1中安装腔的结构放大图; 图5为实施例1中餐桌的俯视结构示意图; 图6为实施例1中支撑台的俯视结构示意图。











