
技术摘要:
一种致动器控制布置,所述致动器控制布置包括:液压致动器(100),所述液压致动器具有壳体(200)和活塞杆(300),所述活塞杆可响应于向所述活塞杆施加压力而在所述壳体内相对于所述壳体在中性位置、缩回位置与延伸位置之间轴向地移动;止动件(900),所述止动件设置在所述 全部
背景技术:
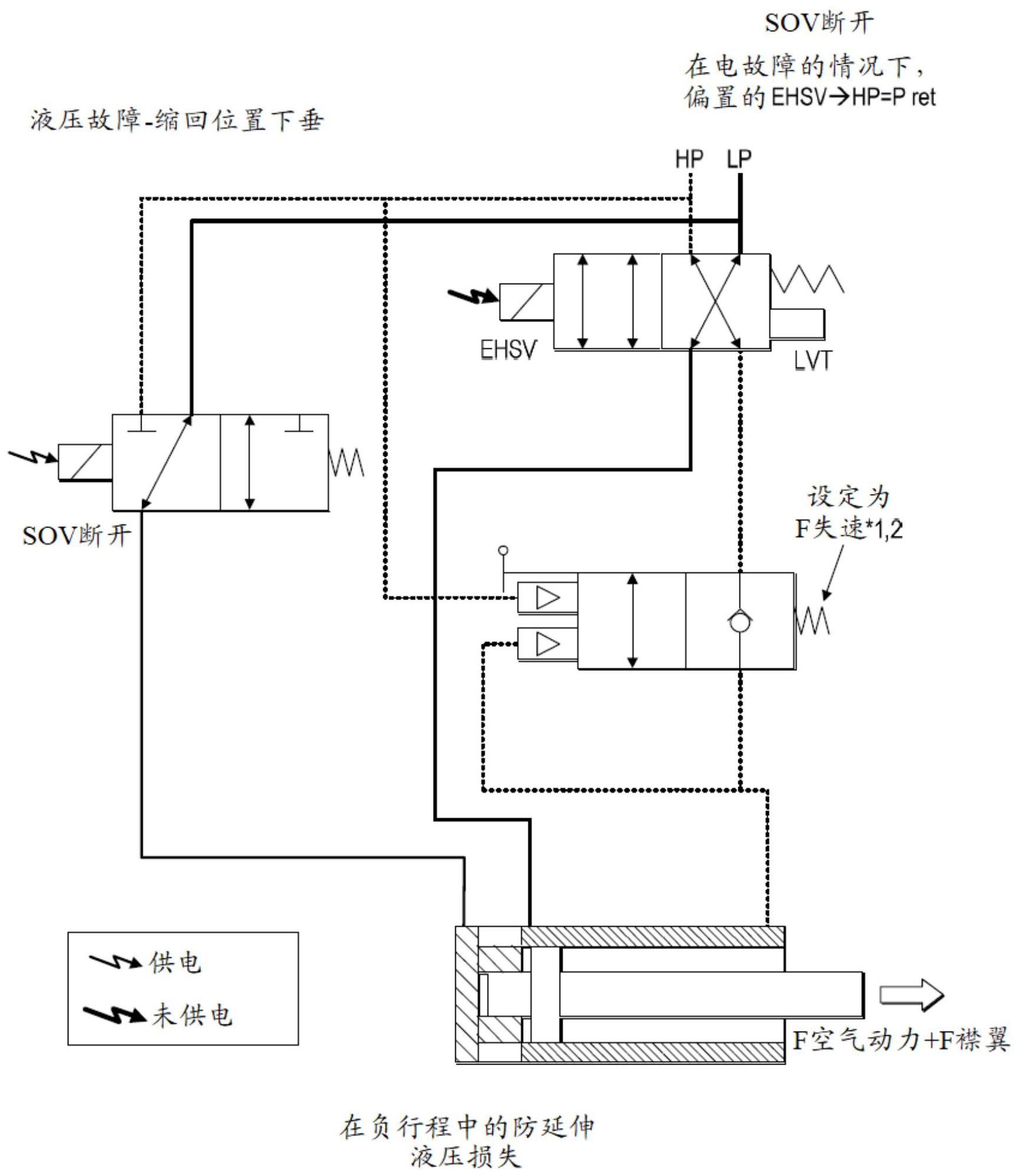
液压致动器有很多应用,特别是在控制可移动部件的移动方面。在飞机中,很多可 移动部件和表面借助于液压致动器进行移动。 一般来说,液压致动器包括圆柱形壳体,其中安装可轴向地移动的活塞杆。在壳体 的内部,杆的头将壳体分成两个室,每一个室都具有流体端口,经由该流体端口,加压流体 可以注射到该室中或低压力流体离开该室,以便在活塞头的任一侧改变两个室中的相对压 力,从而引起活塞相对于壳体移动。活塞杆的延伸出壳体的自由端附接到要移动的部件或 表面。将液压流体从经由致动器壳体中的端口与该壳体的内部流体连通的液压流体供应源 提供到致动器,以引起活塞杆延伸出壳体,或者将液压流体从壳体抽出,以引起活塞杆缩回 到壳体中。活塞杆的移动由响应于控制信号而施加到致动器的流体的方向或/和压力决定。 在活塞杆相对于壳体移动时,它附接到的可移动部件或表面将相应地移动。 为了允许杆的延伸和杆的缩回,提供阀以将移动设定为延伸或缩回。这可以是伺 服阀,更具体地是电液伺服阀(EHSV)。该阀定位在液压流体供应源与致动器之间,并且可响 应于电控制信号而在第一位置与第二位置之间移动,在第一位置,高压力流体从供应源流 到致动器壳体的一个室中并且低压力流体从另一个室离开,在第二位置,高压力流体注射 到另一个室中并且从致动器壳体的第一室抽出。阀还可以具有中性或关闭位置,在该位置, 流体既不供应到致动器壳体也不从致动器壳体抽出。 由EHSV控制的液压致动器的一个特定应用是控制飞机的机翼上的扰流器的移动。 扰流器是安装在机翼上、在襟翼后方的可移动表面。当飞机在巡航时,襟翼和扰流器两者都 沿着机翼平放。为了降低飞机速度,扰流器相对于机翼向上抬高。 扰流器移动是液压致动器延伸引起的,如上所述。 如果在扰流器延伸时损失电力,则扰流器可能会施加过度的阻力。因此,已知在电 力损失的情况下将扰流器缩回到其在壳体中的‘零’位置的系统。通常,这通过以下手段来 实现:将EHSV偏置到阀位置,以引起活塞缩回到壳体中,在该阀位置,高压力流体被提供到 活塞头的活塞杆侧上的室,使得该头的这侧上的压力大于另一个室中的压力。这将在下文 进一步描述。 常规上,在壳体内的机械止动件将活塞杆停止在零位置处。 如果出现液压动力的损失,则在扰流器控制中也可能发生问题。此处,防止致动器 的延伸的解决方案是EHSV与致动器之间的防延伸阀,该防延伸阀在液压压力降至低于预定 压力(通常是给定的‘失速’压力的1.2倍)时切换到压力释放位置。同样,这将在下文进一步 描述。 如果扰流器延伸并且压力损失,则扰流器将通过空气动力载荷而缩回,并且将逐 3 CN 111550468 A 说 明 书 2/6 页 渐地下降以变成与机器表面对齐,直到达到零铰链位置为止。重要的是,将扰流器保持在这 个位置以防止伪延伸。 大多数飞机都具有使用致动器杆的正行程(即,用于使杆延伸以抬起扰流器)操作 的扰流器。致动器的行程是在壳体中的‘零’位置与延伸位置之间,并且控制系统偏置以将 杆返回到零位置。 最近,一些飞机已经使用活塞杆的负行程在扰流器中结合‘下垂’功能,负行程即 回到壳体中比零位置更远的位置,或者换句话说,在与用于使杆延伸的正行程中移动的方 向相反的方向上从零位置移动的行程。 下垂功能用来相对于机翼降低扰流器,例如,用于高扬程操纵,或者如果襟翼延 伸,则用来封闭襟翼与扰流器之间的较大气隙。 在扰流器和襟翼运动范围的重叠区域中出现问题。如果例如驱动扰流器的电力损 失,则当未被致动器驱动时,扰流器将在其自身的重量下或在来自EHSV偏置的压力下压靠 襟翼,从而干扰襟翼的移动(如果需要缩回的话)。在液压故障的情况下,防延伸阀将被激活 并且襟翼然后将克服防延伸阈值以便能够推动扰流器并因此返回到其中性位置。 然而,本发明人已经认识到需要提供一种阀和活塞组件,该阀和活塞组件在将扰 流器重定中心到其中性位置的情况下、特别是在电故障的情况下防止扰流器和襟翼彼此干 扰。
技术实现要素:
本公开的布置允许扰流器致动器在电故障的情况下借助于致动器壳体内部的可 移动止动件从负行程重定中心到其零位置或中性位置。 具体地,提供了一种致动器控制布置,所述致动器控制布置包括:液压致动器,所 述液压致动器具有壳体和活塞杆,所述活塞杆可响应于向所述活塞杆施加压力而在所述壳 体内相对于所述壳体在中性位置、缩回位置与延伸位置之间轴向地移动;止动件,所述止动 件设置在所述壳体内以限制所述活塞杆移动到所述壳体中的程度,所述止动件可在中性位 置与缩回位置之间移动;以及电磁阀,所述电磁阀布置在压力源与所述致动器之间,所述电 磁阀可响应于电控制信号而在第一模式与第二模式之间切换,其中在所述第一模式下,所 述电磁阀形成从所述压力源到所述致动器的流体流动路径,以便将所述止动件定位在其中 性位置,并且在所述第二模式下,所述电磁阀形成流体流动路径以从所述致动器释放压力 来准许所述止动件移动到其缩回位置。 所述布置优选地还包括电液伺服阀(EHSV),所述EHSV在所述压力源与所述致动器 之间以响应于所述电控制信号而控制加压流体到所述致动器的方向。所述EHSV优选地可在 第一位置与第二位置之间移动,在所述第一位置,高压力流体从所述流体源被引向所述致 动器的第一室以引起所述活塞杆的延伸,在所述第二位置,高压力流体被引向所述致动器 的第二室以引起所述活塞杆相对于所述壳体的缩回。 所述EHSV的默认位置优选地是所述第二位置。 所述布置优选地还包括设在所述EHSV与所述致动器之间的防延伸阀,所述防延伸 阀被配置成在第一位置与第二防延伸位置之间移动,在所述第一位置,所述EHSV与所述致 动器之间形成流体路径,所述第二防延伸位置用于在压力损失的情况下防止所述活塞杆相 4 CN 111550468 A 说 明 书 3/6 页 对于所述壳体的延伸。 附图说明 现在将仅通过示例并参考附图来描述优选实施方案。 图1是常规致动器控制阀布置的示意图。 图2是根据本公开的处于第一状态的致动器控制阀布置的示意图。 图3是根据本公开的处于第二状态的致动器控制阀布置的示意图。 图4是根据本公开的处于第三状态的致动器控制阀布置的示意图。 图5是根据本公开的处于第四状态的致动器控制阀布置的示意图。 图6是根据本公开的处于第五状态的致动器控制阀布置的示意图。 图7是根据本公开的处于第六状态的致动器控制阀布置的示意图。 图8是根据本公开的处于第七状态的致动器控制阀布置的示意图。 图9是根据本公开的处于第八状态的致动器控制阀布置的示意图。 图10是根据本公开的处于第九状态的致动器控制阀布置的示意图。 图11是根据本公开的处于第十状态的致动器控制阀布置的示意图。 图12是根据本公开的处于第十一状态的致动器控制阀布置的示意图。 图13是根据本公开的处于第十二状态的致动器控制阀布置的示意图。











