
技术摘要:
本发明属于无人艇路径跟踪控制技术领域,具体涉及一种基于侧滑角补偿的无人艇路径跟踪自抗扰控制方法。本发明设计的ELOS导引算法采用侧滑角观测器对时变未知侧滑角进行估计和补偿,避免了传统导引算法在侧滑角未知条件下存在路径跟踪误差较大的问题,减少了无人艇上测 全部
背景技术:
近年来,水面无人艇是国内外智能化海洋装备研究领域的热点。对于在海洋中航 行的无人艇,保证其在安全航行的前提下沿着期望航线航行是无人艇执行各项任务的前提 条件,因此,研究无人艇路径跟踪控制十分重要。由于无人艇在时变海风扰动作用下航行时 会出现时变侧滑角,当侧滑角无法给出或者给出的值不准确时,由于无人艇横荡方向上没 有直接的控制力,因此侧滑角可能会引起很大的路径跟踪误差,为了保证路径跟踪性能,需 要对未知的侧滑角进行估计和补偿,从而设计适用于侧滑角未知条件的路径跟踪导引算 法,进一步设计高性能的路径跟踪自抗扰控制器。 目前,处理侧滑角使用较多的方法是在LOS导引中加入积分项的积分导引(ILOS) 和将侧滑角看作未知常量参数进行估计的自适应导引(ALOS),这两种方法都能有效补偿侧 滑角,但是仍存在不足之处。其一,两种方法都只能处理恒定侧滑角,而无人艇在海上航行 时,时变海风干扰会导致时变侧滑角,即使海风干扰恒定,无人艇跟踪曲线路径时侧滑角也 是时变的;其二,两种方法都含有积分项,可能会因为相位滞后造成稳定裕度降低;此外,由 于跟踪误差大,ALOS导引在过渡阶段可能会出现不理想的偏差或振荡。因此,通过引入侧滑 角观测器对时变侧滑角进行估计,设计一种可用于侧滑角未知条件下的路径跟踪导引算法 在理论研究和工程领域都具有十分重要的意义。
技术实现要素:
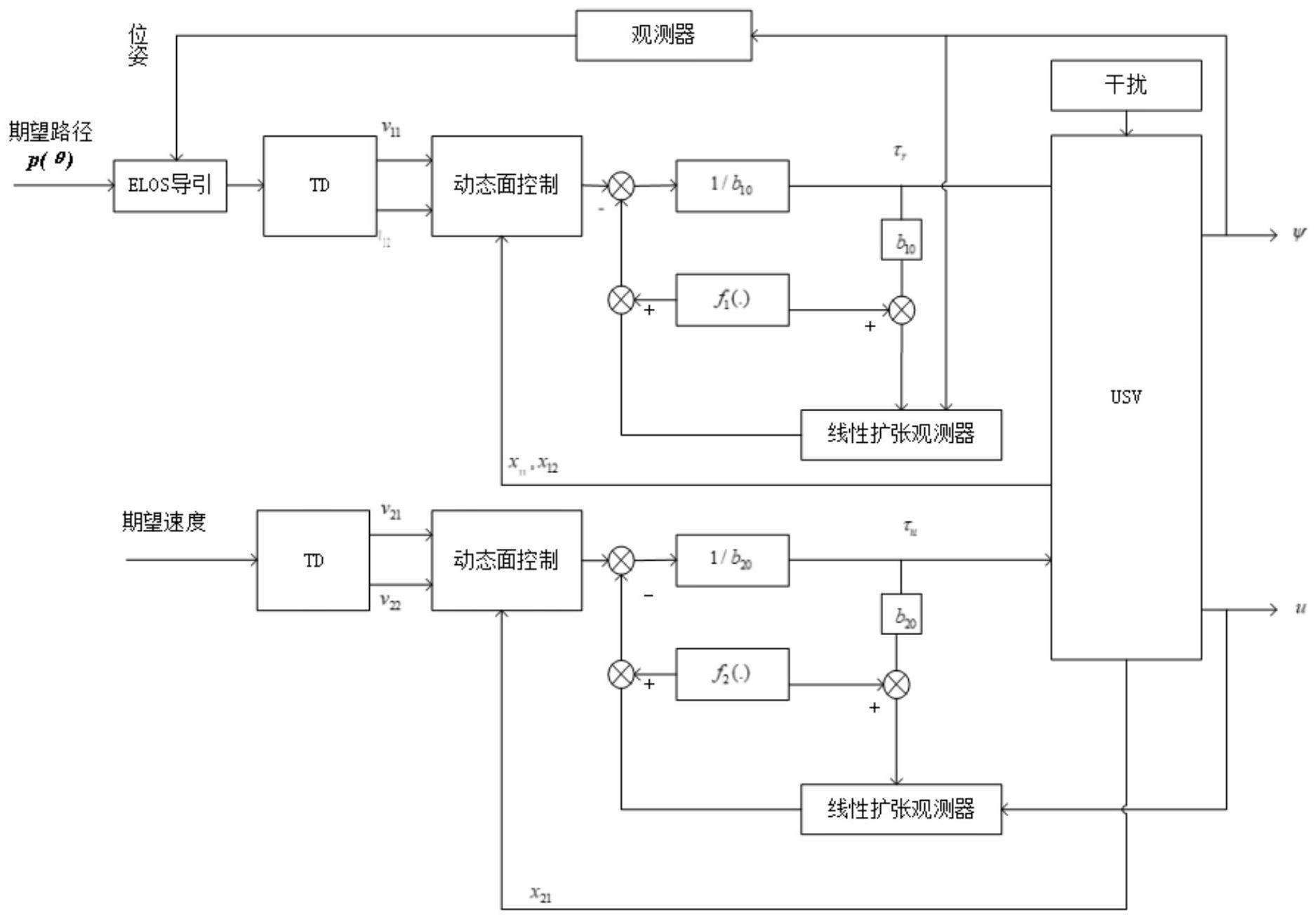
本发明的目的在于提供解决现有的路径跟踪导引算法在时变海风干扰以及侧滑 角无法给出或者给出的值不准确时路径跟踪误差较大、跟踪性能较差的问题,保证无人艇 在时变海风扰动和侧滑角未知条件下能够较好的跟踪上期望路径的一种基于侧滑角补偿 的无人艇路径跟踪自抗扰控制方法。 本发明的目的通过如下技术方案来实现:包括以下步骤: 步骤1:无人艇在执行路径跟踪任务时,获取当前时刻无人艇的位姿及速度信息, 根据设定的期望几何路径,以目标跟踪点为原点构造SF坐标系并计算SF坐标系下的无人艇 位姿误差向量; 所述的当前时刻无人艇的位姿及速度信息包括无人艇在北东坐标系下位姿(x,y, ψ)、船体坐标系下无人艇的纵向速度、横向速度及艏向角速度(u,v,r); 北东坐标系中目标跟踪点的坐标为P(θ)=[x(θ) ,y(θ)]T,以P(θ)为原点构造SF坐 标系,其纵轴和横轴分别为xSF轴和ySF轴;SF坐标系下的无人艇位姿误差向量[xe,ye,ψe]T为: 4 CN 111580523 A 说 明 书 2/15 页 其中,ψw=ψ β表示无人艇的航迹角,β=arctan(v/u);ψθ=arctan2(y′(θ) ,x′(θ)) 表示北东坐标系向SF坐标系转换时的旋转角度; 步骤2:根据ELOS导引算法计算时变未知侧滑角的估计值 和无人艇的期望艏向 角ψd; 其中, 表示无人艇的合速度大小;k为ELOS导引参数;Δ为目标跟踪点 P(θ)处沿设定路径切向的前视距离参数; 步骤3:通过艏向线性扩张状态观测器观测当前时刻艏向海风扰动和无人艇的艏 向角,得到艏向海风扰动观测值x11和艏向角观测值z11;通过纵向线性扩张状态观测器观测 当前时刻纵向海风扰动和无人艇的纵向速度,得到纵向海风扰动观测值x21和纵向速度观测 值z21; 步骤4:将计算得到的无人艇期望艏向角ψd输入到跟踪微分器TD中,得到输出结果 将设定的无人艇期望速度ud输入到跟踪微分器TD中,得到输出结果 步骤5:计算虚拟控制率 并将虚拟控制率 输入到一阶滤波器中,得到一阶 滤波器的输出结果α12; S11=x11-v11 其中,k11为滤波器设计参数;v12为v11的导数, 为v12的导数,由 通过积分获取 v12,由v12通过积分获取v11; 步骤6:计算转艏力矩控制律,并输入到无人艇艏向控制器中,实现对无人艇艏向 的运动控制;计算纵向推力控制律,并输入到无人艇纵向速度控制器中,实现对无人艇纵向 速度的控制; 所述的转艏力矩控制律为: 5 CN 111580523 A 说 明 书 3/15 页 所述的纵向推力控制律为: u20=-k21S21 v22 其中,m11,m22,m33为无人艇的惯性质量参数,d11,d12,d13,d22,d23,d32,d33为无人艇的 水动力阻尼参数;k12为艏向控制器设计参数;k21为纵向速度控制器设计参数; 为v22的导 数,由 通过积分获取v22; 步骤7:判断无人艇是否收敛到期望的位置,若未收敛到期望位置则返回步骤1计 算相应偏差,进行下一时刻的运动控制。 本发明的有益效果在于: 本发明设计的ELOS导引算法采用侧滑角观测器对时变未知侧滑角进行估计和补 偿,并给出目标跟踪点的路径参数更新率和期望艏向角,避免了传统导引算法在侧滑角未 知条件下存在路径跟踪误差较大的问题,由于设计的侧滑角观测器可以在侧滑角未知条件 下得到侧滑角的估计值,因此减少了无人艇上测量装置的数量,经济实用,提高了系统的冗 余性。 本发明设计的艏向及纵向速度动态面自抗扰控制器能够使无人艇跟踪期望路径 时有较快的误差收敛速度和较高的跟踪精度,其中,设计的跟踪微分器安排的过渡过程对 艏向角和纵向速度的期望值有较快的跟踪速度;采用的线性扩张状态观测器能够很好地估 计纵向风力和转艏风力矩,并且将观测器带宽作为唯一参量,简化了参数整定工作,避免了 传统非线性扩张状态观测器结构复杂、理论分析困难、待调节参数较多且参数整定难度较 大的问题;采用动态面控制避免了反步法存在的“微分爆炸”问题。 附图说明 图1为基于侧滑角补偿的无人艇路径跟踪自抗扰控制原理图。 图2为ELOS导引原理图。 图3为ELOS导引坐标图。 图4为USV路径跟踪艏向动态面自抗扰控制器结构图。 图5为USV路径跟踪纵向速度动态面自抗扰控制器结构图。 6 CN 111580523 A 说 明 书 4/15 页 图6为设定曲线路径和USV跟踪航迹曲线图。 图7为侧滑角估计曲线图。 图8为SF坐标系下纵向和横向位置误差曲线图。 图9为艏向角和纵向速度跟踪误差曲线图。 图10为艏向角、转艏角速度和纵向速度观测误差曲线图。 图11为纵向风力和转艏风力矩观测误差曲线图。 图12为USV控制输入曲线图。











