
技术摘要:
本发明属于影像匹配技术领域,具体涉及一种影像匹配方法及装置。本发明首先利用SIFT算法提取待匹配影像的特征点,生成高维特征点矩阵,再将高维特征点矩阵进行拆分,得到高维种子点矩阵,继续利用LDA的监督学习降维技术,将高维种子点矩阵转换为低维种子点矩阵,且低维 全部
背景技术:
数字影像匹配是指通过一定的匹配算法,根据影像的特征信息在两幅或多幅影像 之间识别同名点的过程,已广泛应用于图像拼接与融合、模式识别与目标跟踪等图像处理 领域和机器视觉领域。对特征点进行提取以及匹配是影像匹配的重要环节。 特征匹配的经典算法尺度不变特征变换SIFT(Scale-Invariant Feature Transform)算法于1999年由David Lowe教授提出,并在2004年对其进行完善。SIFT匹配算 法是数字摄影测量领域中常用的提取并描述影像中局部特征的算法,主要针对局部区域包 含的不变量进行提取。SIFT具有诸多优点,能够提取稳定的特征。对物体摄取二维影像时, 所获得的影像一般会由于平移、旋转、缩放发生变形,但由于物体是固定不变的,所以无论 影像如何变化,针对这一物体就会存在不变量。SIFT根据不变量进行特征检测,所检测的特 征对于图像的尺度和旋转能保持不变性,同时对于亮度的改变也具有较强鲁棒性,并且能 够较好地应对拍摄视角的调整、噪声的干扰以及一定程度上的仿射变形,能够实现两幅差 异较大的图像之间的特征的匹配。虽然SIFT算法具有诸多优点,但是,由于SIFT算法本身复 杂度高,其所生成的特征描述符是高维向量(例如128维),高维度向量在匹配过程中不仅耗 时,并且占用着巨大的计算资源和存储资源,匹配时间久,在实际应用中处理速度明显降 低,很难满足实时性的要求。 随着统计学理论的不断发展,数据降维技术被运用在计算机视觉领域。曾有学者 利用主成分分析法PCA(Principal Component Analysis)对特征向量进行降维,该方法将 特征点邻域内像素梯度分量构成的高维特征向量投影至前20维本征向量空间,即降低至20 维。PCA算法使特征向量维度有效降低,大幅度提升了匹配速度,但由于其属于不添加标签 的无监督学习,所以匹配精度仍需提高。
技术实现要素:
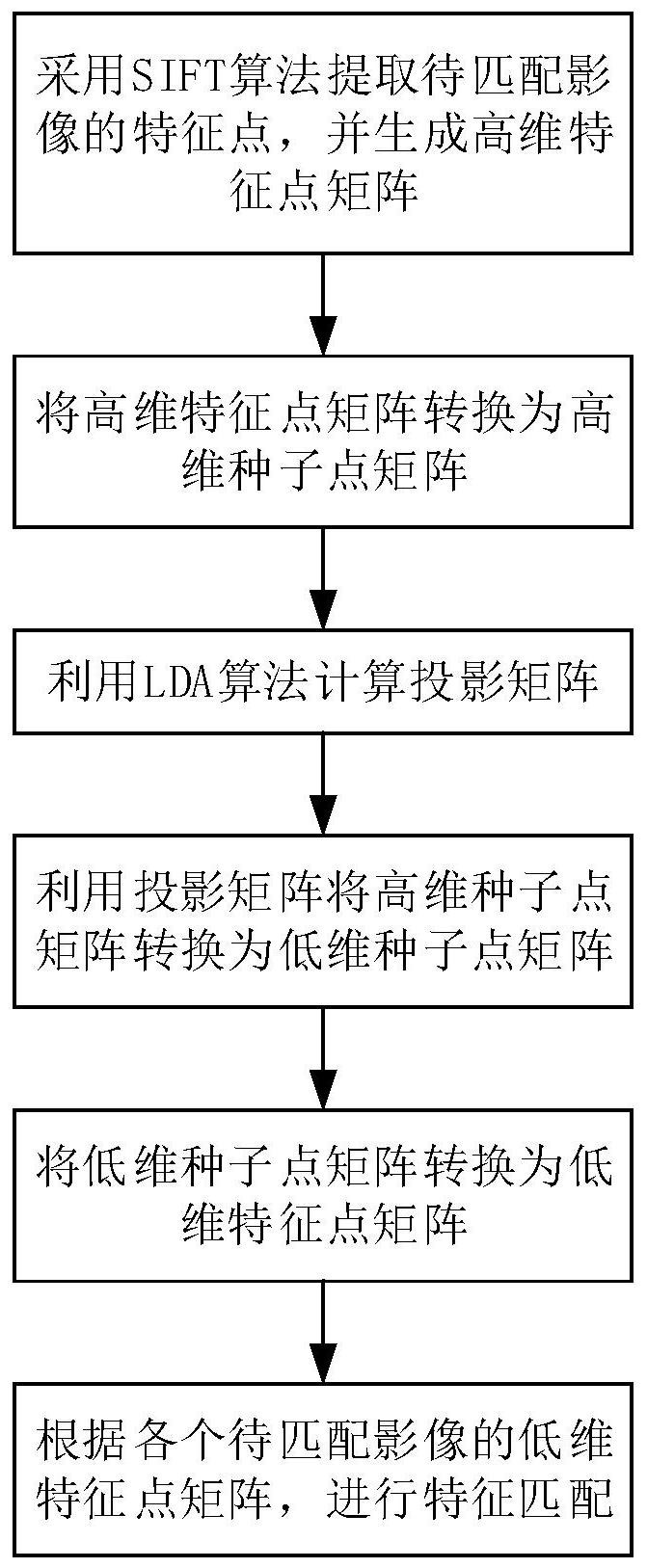
本发明提供了一种影像匹配方法及装置,用以解决现有技术采用无监督学习算法 进行降维造成的匹配精度低的问题。 为解决上述技术问题,本发明的技术方案包括: 本发明提供了一种影像匹配方法,包括如下步骤: 1)采用SIFT算法分别提取待匹配影像的特征点,生成高维特征点矩阵;所述高维 特征点矩阵的一行为一个特征点的高维特征向量,且一个特征点包括K个种子点,一个特征 点的高维特征向量包括K个种子点的高维特征向量,K>1; 2)将高维特征点矩阵的每一行进行拆分,得到高维种子点矩阵;所述高维种子点 矩阵的一行为一个种子点的高维特征向量; 3)为各个种子点设置标签,并以其中一个待匹配影像的高维种子点矩阵及其标签 3 CN 111582142 A 说 明 书 2/10 页 作为数据集,采用LDA算法计算得到将高维种子点矩阵降至低维种子点矩阵的投影矩阵;低 维种子点矩阵中的向量维数低于高维种子点矩阵中的向量维数; 4)利用所述投影矩阵将各个待匹配影像的高维种子点矩阵转换为低维种子点矩 阵;所述低维种子点矩阵的一行为一个种子点的低维特征向量; 5)将属于同一个特征点的种子点的低维特征向量进行合并,以将低维种子点矩阵 转换为低维特征点矩阵;所述低维特征点矩阵的一行为一个特征点的低维特征向量; 6)根据各个待匹配影像的低维特征点矩阵,进行特征匹配。 上述技术方案的有益效果为:本发明首先利用SIFT算法提取待匹配影像的特征 点,生成高维特征点矩阵,再将高维特征点矩阵进行拆分,得到高维种子点矩阵,继续利用 LDA的监督学习降维技术,将高维种子点矩阵转换为低维种子点矩阵,且低维种子点矩阵中 的向量维数低于高维种子点矩阵中的向量维数,继而再将低维种子点矩阵转换为低维特征 点矩阵,使得最终得到的低维特征点矩阵中的向量维数低于高维特征点矩阵中的向量维 数,实现了高维特征点矩阵的降维处理,缩短了影像匹配时间,提高了运行效率。该方法采 用LDA算法可以将每个特征点的特征向量有效分离开,使同一影像提取出的特征点差异更 明显,从而达到更好的匹配效果。 作为方法的进一步改进,所述根据各个待匹配影像的低维特征点矩阵,进行特征 匹配包括:根据各个待匹配影像中特征点的低维特征点向量,计算特征点之间的欧氏距离, 并以欧氏距离最小的两个特征点作为匹配点。 作为方法的进一步改进,为了进行更加精准的匹配,还包括将匹配结果进行筛选, 剔除误匹配的步骤。 作为方法的进一步改进,采用RANSAC算法将匹配结果进行筛选。 作为方法的进一步改进,为了使各种子点更聚集,不同特征描述符间空间距离更 大,以便于区分各个特征,步骤3)中,为各个种子点设置标签时,属于同一个特征点的种子 点的标签设置一致,不同特征点的种子点的标签不一致。 本发明还提供了一种影像匹配装置,包括存储器和处理器,所述处理器用于执行 存储在存储器中的指令以实现上述方法,并达到与方法相同的效果。 附图说明 图1是本发明的由关键点邻域梯度信息生成的特征向量的示意图; 图2是现有技术的LDA算法的流程图; 图3是本发明的方法实施例的流程图; 图4-1a、图4-1b、图4-1c、图4-1d、图4-1e、图4-1f是Brikes数据集中的影像图,且 模糊程度依次增大; 图4-2a、图4-2b、图4-2c、图4-2d、图4-2e、图4-2f是Boat数据集中的影像图,且为 不同旋转及缩放下的影像图; 图5-1是无人机遥感实验影像中第一组的影像A的影像图; 图5-2是无人机遥感实验影像中第一组的影像B旋转后的影像图; 图5-3是无人机遥感实验影像中第二组的影像A的影像图; 图5-4是无人机遥感实验影像中第二组的影像B旋转并模糊后的影像图; 4 CN 111582142 A 说 明 书 3/10 页 图6-1是采用本发明LDA-SIFT算法对图5-1和图5-2遥感影像进行匹配的匹配结果 图; 图6-2是采用本发明LDA-SIFT算法对图5-3和图5-4遥感影像进行匹配的匹配结果 图; 图7是本发明的装置实施例的结构图。











