
技术摘要:
一种布置在机柜顶部的数据机房温度巡检机器人,属于数据机房热环境探测领域。本发明解决了数据机房空间温度难以监测和机柜顶部积灰难以清理的问题。主要包括:机器人(1)、第一机器人毛刷(2)、机器人万向轮(4)、第一机器人动力轮(5)、第一可伸缩弹簧温度传感器(7)、红外 全部
背景技术:
数据中心(机房系统)一般拥有大量IT设备(如服务器、网络设备等)和基础设施设 备(如空调、电力设备等)。随着数据中心系统的扩展,其配套的IT设备也日益增多,计算机 房已成为各大单位的重要组成部分。数据中心系统的能耗非常大,一个标准的大型数据中 心,其能耗目前相当于一个数十万人的小型城市,在消耗电能的同时会释放热能,造成温度 堆积,如果不能及时散热,将造成机房停机乃至发生火灾。这就需要对数据机房温度场进行 实时检测分析,特别是机柜服务器温度。在任何情况下,均不允许服务器等设备在超出其工 作温度以外的范围运行。 近几年对数据机房温度检测技术的研究取得了很大的进展,针对数据机房温度检 测的实际应用也有相关的技术涌现,专利CN201911370250提出的一种数据机房温度分布检 测方法及其检测系统,该专利所述的检测方法是以地面的某一方便观察的参考点为原点建 立数据机房的温度分布空间坐标;在空间均匀设置多个检测点,检测每个检测点的温度值, 需安装多个检测装置,其安装过程复杂,系统占空间大,不适用于现存机房的改造工作;专 利 CN201721518504提出的一种机房温度检测及控制装置,该专利的检测系统包括一个位 于室外的第一温度传感器和多个设置在室内不同区域的第二温度传感器,安装在室内的温 度传感器数量过多,不易控制,且其检测点更侧重于机柜中下层区域,不能覆盖机柜顶部。 相对于现有专利成果,本发明的优点在于将机器人布置在机柜顶部移动,合理利 用数据机房顶部多余的空间,搭建隔板,使得机器人可在机柜顶部全方位移动,有效节约了 安装额外温度测量系统的空间;搭载可伸缩弹簧温度传感器和红外温度传感器,通过机器 人在各机柜顶部的停留实现对各个机柜服务器进出风口的全方位温度监测;合理规划机器 人巡检路线,实现了对机房内机柜的覆盖;同时利用机器人携带的毛刷清理机柜顶部灰尘, 有效改善机柜顶部散热空间。本发明为后续机房空调节能及精确送风系统的设计提供了基 础。
技术实现要素:
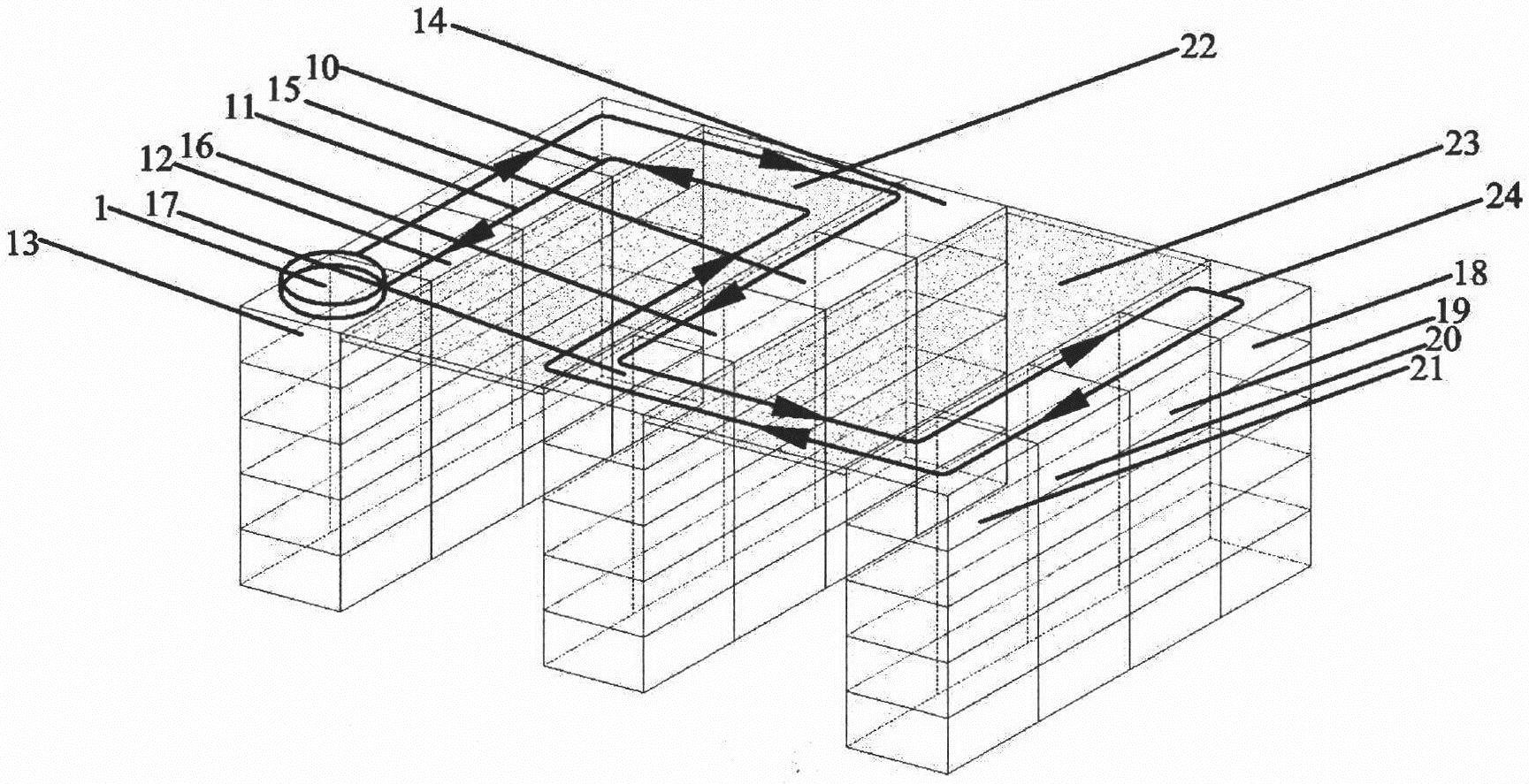
本发明的目的是提供一种布置在机柜顶部的数据机房温度巡检机器人及方法。 一种布置在机柜顶部的数据机房温度巡检机器人及方法由机器人1、第一机器人 毛刷2、第二机器人毛刷3、机器人万向轮4、第一机器人动力轮5、第二机器人动力轮6、第一 可伸缩弹簧温度传感器7、第二可伸缩弹簧温度传感器8、红外温度传感器9、第一机柜10、第 二机柜11、第三机柜12、第四机柜13、第五机柜14、第六机柜15、第七机柜16、第八机柜 17、 第九机柜18、第十机柜19、第十一机柜20、第十二机柜21、第一连接板22、第二连接板23、机 器人移动路线24组成; 5 CN 111590540 A 说 明 书 2/6 页 其中,第一机柜10、第二机柜11、第三机柜12、第四机柜13依次并列组成第一排机 柜,第五机柜14、第六机柜15、第七机柜16、第八机柜17依次并列组成第二排机柜,第九机柜 18、第十机柜19、第十一机柜20、第十二机柜21依次并列组成第三排机柜,第一连接板22 连 接第一排机柜和第二排机柜,第二连接板23连接第二排机柜和第三排机柜; 第一机器人毛刷2、第二机器人毛刷3分别位于机器人1底部的前方两侧,机器人万 向轮4位于机器人1底部的前方,第一机器人动力轮5、第二机器人动力轮6分别位于机器人1 底部的后方两侧,第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度传感器8分别位于机 器人1左右两侧,第一机器人毛刷2位于第一机器人动力轮5的右前方,第二机器人毛刷3 位 于第二机器人动力轮6的左前方,第一可伸缩弹簧温度传感器7位于第一机器人毛刷2的正 上方,第二可伸缩弹簧温度传感器8位于第二机器人毛刷3的正上方,红外温度传感器9 位 于机器人1底部的正中央。 当数据机房开始工作时,机器人1按照机器人移动路线24绕第一机柜10、第二机柜 11、第三机柜12、第四机柜13、第五机柜14、第六机柜15、第七机柜16、第八机柜17、第九机柜 18、第十机柜19、第十一机柜20、第十二机柜21顺时针行走,返回时沿第十二机柜21、第十一 机柜20、第十机柜19、第九机柜18、第八机柜17、第七机柜16、第六机柜15、第五机柜14、第四 机柜13、第三机柜12、第二机柜11、第一机柜10逆时针行走; 当机器人1移动至第一机柜10正上方时,机器人1上的第一可伸缩弹簧温度传感器 7、第二可伸缩弹簧温度传感器8不断向下伸展,探测第一机柜10的各层服务器进出口温度, 红外温度传感器9测量第一机柜10的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对 第一机柜10顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧 温度传感器8回缩至初始状态; 机器人1移动到第二机柜11正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第二机柜11的各层服务器进出口温度,红外 温度传感器9测量第二机柜11的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第二 机柜11顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第三机柜12正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第三机柜12的各层服务器进出口温度,红外 温度传感器9测量第三机柜12的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第三 机柜12顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第四机柜13正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第四机柜13的各层服务器进出口温度,红外 温度传感器9测量第四机柜13的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第四 机柜13顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第五机柜14正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第五机柜14的各层服务器进出口温度,红外 温度传感器9测量第五机柜14的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第五 6 CN 111590540 A 说 明 书 3/6 页 机柜14顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第六机柜15正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第六机柜15的各层服务器进出口温度,红外 温度传感器9测量第六机柜15的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第六 机柜15顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第七机柜16正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第七机柜16的各层服务器进出口温度,红外 温度传感器9测量第七机柜16的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第七 机柜16顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第八机柜17正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第八机柜17的各层服务器进出口温度,红外 温度传感器9测量第八机柜17的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第八 机柜17顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第九机柜18正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第九机柜18的各层服务器进出口温度,红外 温度传感器9测量第九机柜18的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第九 机柜18顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第十机柜19正上方,机器人1上的第一可伸缩弹簧温度传感器7、第 二可伸缩弹簧温度传感器8不断向下伸展,探测第十机柜19的各层服务器进出口温度,红外 温度传感器9测量第十机柜19的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3对第十 机柜19顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩弹簧温度 传感器8回缩至初始状态; 机器人1移动到第十一机柜20正上方,机器人1上的第一可伸缩弹簧温度传感器7、 第二可伸缩弹簧温度传感器8不断向下伸展,探测第十一机柜20的各层服务器进出口温度, 红外温度传感器9测量第十一机柜20的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3 对第十一机柜20顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩 弹簧温度传感器8回缩至初始状态; 机器人1移动到第十二机柜21正上方,机器人1上的第一可伸缩弹簧温度传感器7、 第二可伸缩弹簧温度传感器8不断向下伸展,探测第十二机柜21的各层服务器进出口温度, 红外温度传感器9测量第十二机柜21的顶部温度,同时第一机器人毛刷2、第二机器人毛刷3 对第十二机柜21顶部灰尘进行清理,探测完成后第一可伸缩弹簧温度传感器7、第二可伸缩 弹簧温度传感器8回缩至初始状态; 机器人1移动到第十二机柜21正上方之后,机器人1按上述操作经过第十二机柜 21、第十一机柜20、第十机柜19、第九机柜18、第八机柜17、第七机柜16、第六机柜15、第五机 7 CN 111590540 A 说 明 书 4/6 页 柜14、第四机柜13、第三机柜12、第二机柜11到第一机柜10正上方完成温度探测与清扫的循 环。 机器人1从第一机柜10上方按照机器人移动路线24在数据机房内顺时针运行,机 器人 1每隔2h按照机器人移动路线24行走一次后回到第一机柜10正上方。第一可伸缩弹簧 温度传感器7、第二可伸缩弹簧温度传感器8的高度灵活可调,不同高度下第一可伸缩弹簧 温度传感器7、第二可伸缩弹簧温度传感器8均能够维持一段时间。机器人1的智能导航系统 可实现对机房地形的重构,自动规划机器人移动路线24,其智能安全监控系统可防撞,防跌 落,防缠绕。第一机柜10、第二机柜11、第三机柜12、第四机柜13、第五机柜14、第六机柜15、 第七机柜16、第八机柜17、第九机柜18、第十机柜19、第十一机柜20、第十二机柜21的尺寸相 同,机器人1的直径与机柜的宽度相同。 附图说明 附图1为本发明的原理图。 附图1中的标号名称:1.机器人、10.第一机柜、11.第二机柜、12.第三机柜、13.第 四机柜、14.第五机柜、15.第六机柜、16.第七机柜、17.第八机柜、18.第九机柜、19.第十机 柜、20.第十一机柜、21.第十二机柜、22.第一连接板、23.第二连接板、24.机器人移动路线。 附图2为本发明中机器人1的示意图。 附图2中的标号名称:1.机器人、2.第一机器人毛刷、3.第二机器人毛刷、4.机器人 万向轮、5.第一机器人动力轮、6.第二机器人动力轮、7.第一可伸缩弹簧温度传感器、8.第 二可伸缩弹簧温度传感器、9.红外温度传感器。











