
技术摘要:
本发明提供一种孤岛微电网调频控制方法及服务装置,该方法包括将无模型自适应控制器的待整定参数作为径向基神经网络的输出层,将所述微电网的系统实际输出频率与系统输入有功功率的组合作为所述径向基神经网络的输入层;运行所述微电网系统,以采样所述微电网系统的实 全部
背景技术:
微电网在进行二次频率控制器参数设计时需要用到微网频率响应模型,由于微网 系统存在多种结构,内部组成种类多样,以及商业化电源广泛使用情况下难以得到微源模 型等原因,微网系统数学模型难以获取。其次,微网中DG(Distributed Generator,分布式 发电)或负载的切入或断开时常发生,因此微网在运行时是一个时变非线性系统,传统的PI (Proportional Integral,比例积分)控制器是在假设系统是线性且不变的基础上设计的, 当系统结构或某些参数突然变化时,无法实现自适应控制。 无模型自适应控制是一种基于数据驱动的新型控制方法,该方法在应用时只需用 到系统的实时输入输出数据,无需知道系统内部的参数信息,且操作简单,鲁棒性强,对于 具有极强的非线性、未知性和复杂性的微网系统来说,具有很好的应用前景。 然而,目前无模型自适应控制器在应用前仍需要提前设定好控制器参数值,且无 法实现参数在线自整定,导致在某些系统中应用时效果并不理想,这给无模型自适应控制 器的应用与推广带来了极大的阻碍。
技术实现要素:
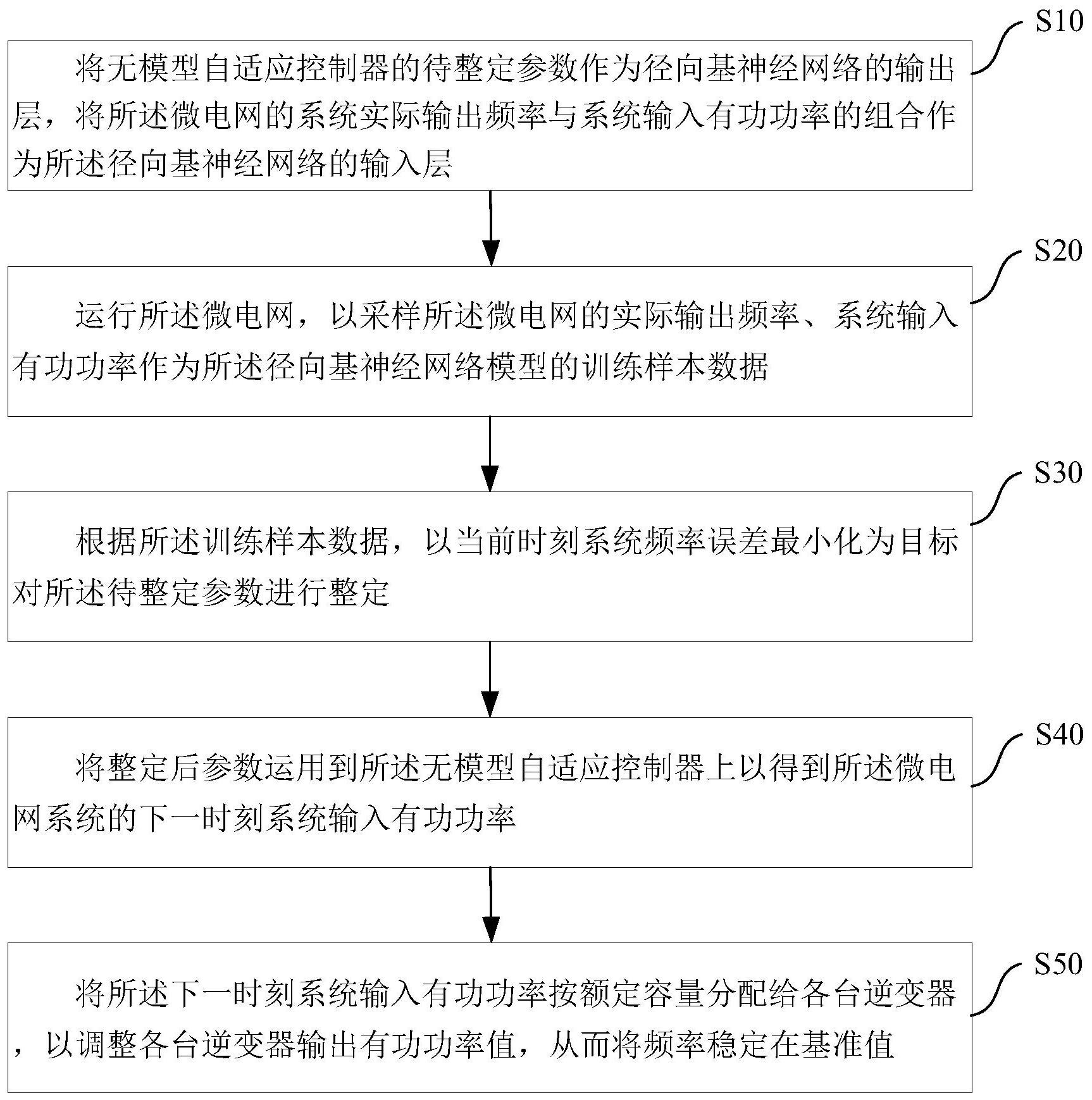
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种孤岛微电网调频控制 方法及服务装置,用于解决现有技术中无模型自适应控制器在应用时无法实现参数在线自 整定和微网二次调频无法实现自适应控制的技术问题。 为实现上述目的及其他相关目的,本发明提供一种微电网调频控制方法,所述微 电网调频控制方法包括: 将无模型自适应控制器的待整定参数作为径向基神经网络的输出层,将所述微电 网的系统实际输出频率与系统输入有功功率的组合作为所述径向基神经网络的输入层; 运行所述微电网,以采样所述微电网的实际输出频率、系统输入有功功率作为所 述径向基神经网络模型的训练样本数据; 根据所述训练样本数据,以当前时刻系统频率误差最小化为目标对所述待整定参 数进行整定。 在一可选实施例中,所述待整定参数包括步长因子和惩罚因子。 在一可选实施例中,将所述微电网的上一时刻系统实际输出频率值、当前时刻系 统实际输出频率值与上一时刻系统输入有功功率作为所述径向基神经网络的输入层。 在一可选实施例中,所述当前时刻频率误差为系统期望输出频率值与当前时刻系 统实际输出频率值之差。 在一可选实施例中,所述孤岛微电网调频控制方法还包括步骤: 将整定后参数运用到所述无模型自适应控制器上以得到所述微电网的下一时刻 4 CN 111585292 A 说 明 书 2/9 页 系统输入有功功率; 将所述下一时刻系统输入有功功率按额定容量分配给各台逆变器,以调整各台逆 变器输出有功功率值,从而将频率稳定在基准值。 在一可选实施例中,所述将整定后参数运用到所述无模型自适应控制器上以得到 所述微电网的下一时刻系统输入有功功率的步骤包括,基于所述整定后参数、所述当前时 刻系统频率误差与当前时刻偏导数估计值,通过所述无模型自适应控制器计算出所述微电 网的下一时刻系统输入有功功率。 在一可选实施例中,所述当前时刻偏导数估计值的获取方法包括: 根据所述训练样本数据获取所述当前时刻系统频率误差、当前时刻系统实际输出 频率值与上一时刻系统实际输出频率值的频率输出变化量、以及上一时刻的系统输入有功 功率值与上上时刻的系统输入有功功率值的功率输入变化量; 根据所述频率输出变化量及所述功率输入变化量并结合无模型自适应控制器来 计算出当前时刻偏导数估计值。 在一可选实施例中,所述将所述下一时刻系统输入有功功率按额定容量分配给各 台逆变器,以调整各台逆变器输出有功功率值,从而将频率稳定在基准值的步骤包括: 将所述下一时刻系统输入有功功率按额定容量分配给各台逆变器,以调整各台逆 变器输出有功功率值,从而得到下一时刻的系统频率输出值; 重复执行上述步骤,进行下一时刻的基于无模型自适应控制的微电网调频过程, 直到所述微电网的系统实际输出频率恢复到额定频率值。 在一可选实施例中,所述根据所述训练样本数据,以当前时刻系统频率误差最小 化为目标对所述待整定参数进行整定的步骤包括: 根据所述训练样本数据计算上一时刻所述待整定参数的梯度信息; 将所述训练样本数据作为所述径向基神经网络的输入,通过所述径向基神经网络 前向计算以得到所述径向基神经网络的输出,并将所述径向基神经网络的输出作为待整定 的所述无模型自适应控制器的参数值; 以系统频率误差函数最小化为目标,根据所述梯度信息、上一时刻偏导数估计值 及梯度下降方法,进行系统频率误差反向传播,更新所述径向基神经网络的隐含层及输出 层的权系数。 在一可选实施例中,所述根据所述训练样本数据计算上一时刻所述待整定参数的 梯度信息的步骤包括: 根据所述训练样本数据获取所述当前时刻系统频率误差、当前时刻系统实际输出 频率值与上一时刻系统实际输出频率值的频率输出变化量、以及上一时刻的系统输入有功 功率值与上上时刻的系统输入有功功率值的功率输入变化量; 根据所述当前时刻系统频率误差、所述频率输出变化量及所述功率输入变化量并 结合所述无模型自适应控制器来计算出当前时刻偏导数估计值; 基于所述当前时刻系统频率误差与所述当前时刻偏导数估计值来获取所述待整 定参数的梯度信息。 为实现上述目的及其他相关目的,本发明还提供一种服务装置,所述服务装置包 括: 5 CN 111585292 A 说 明 书 3/9 页 通信器,用于与外部通信; 存储器,用于存储计算机程序; 处理器,连接所述通信器及存储器,用于运行所述计算机程序以执行上述任意一 项所述的微电网调频控制方法。 本发明的孤岛微网调频控制方法,利用RBF神经网络的自适应、自学习能力按照一 定的控制周期整定二次调频系统的无模型自适应控制器的参数,能有效克服微网频率控制 中的控制器参数整定问题,实现对微电网二次频率调节的自适应控制。 附图说明 图1显示为本发明的孤岛微电网调频控制方法的流程示意图。 图2显示为本发明的孤岛微网调频方法结构示意图。 图3显示为本发明的孤岛微网调频方法中RBF神经网络整定控制参数的原理图。 图4显示为本发明的具体示例中进行无模型自适应控制器参数自整定仿真的系统 频率波形图。 图5显示为本发明的具体示例中进行无模型自适应控制器参数自整定仿真的惩罚 因子λ变化曲线。 图6显示为本发明的具体示例中进行无模型自适应控制器参数自整定仿真的步长 因子ρ变化曲线。 图7显示为本发明的具体示例中进行无模型自适应控制器参数自整定仿真的分发 给两台逆变器的控制输入有功功率波形图。 图8显示为本发明的具体示例中进行无模型自适应控制器参数验证仿真的系统频 率波形图。 图9显示为本发明的具体示例中进行无模型自适应控制器参数验证仿真的分发给 两台逆变器的控制输入有功功率波形图。 图10显示为本发明的微电网调频控制方法的服务装置的框图。











