
技术摘要:
机器人离线编程工作时长控制及安全保护设备,它涉及一种机器人安全控制保护设备的改进,具体涉及一种机器人离线编程工作时长控制及安全保护设备。在线检测模块的检测信号输出端分别连接在线确认模块和离线确认模块,离线时长确认模块的信号输出端连接中央处理模块,机 全部
背景技术:
机器人(Robot)是一种能够半自主或全自主工作的智能机器,具有感知、决策、执 行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量, 服务人类生活,扩大或延伸人的活动及能力范围。随着人们对机器人技术智能化本质认识 的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特 点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器 人。现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把 握:机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程 序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作。 它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务 业、建筑业甚至军事等领域中均有重要用途。 现有机器人的用途越来越广泛,这些机器儿最大的共同点是他均由软件程序来控 制,随着互联网、物联网的高速发展。这些工作机器人大多采用在线工作或者云端进行运算 工作,这需要强大的互联网和物联网进行支撑。但是机器人工作场景常常有很多环境恶劣, 甚至没有物联网的环境,这会导致机器人无法连上网络导致离线,导致机器人失去控制,这 会导致各种不可预判的后果,有时候甚至造成恶劣或者无法承担的后果。
技术实现要素:
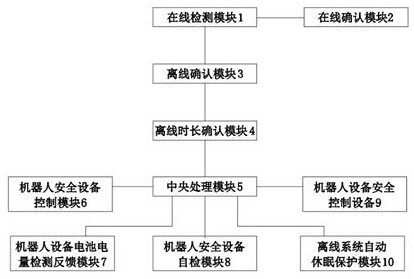
本发明的目的在于针对现有技术的缺陷和不足,提供一种机器人离线编程工作时 长控制及安全保护设备,它能在离线状态下保证机器人安全稳定的运行,并保持安全工作, 它能适应各种恶劣的工作环境,特别是野外环境、地下环境、密闭无网络信号的小范围空间 等情况下,保持机器人离线稳定运行,也能对机器人起到安全保护作用,确保机器人在离线 状态下也能保持安全稳定。 为实现上述目的,本发明采用以下技术方案是:它包括在线检测模块1、在线确认 模块2、离线确认模块3、离线时长确认模块4、中央处理模块5、机器人安全设备控制模块6、 机器人设备电池电量检测反馈模块7、机器人安全设备自检模块8、机器人设备安全控制设 备9、离线系统自动休眠保护模块10,在线检测模块1的检测信号输出端分别连接在线确认 模块2和离线确认模块3,在线确认模块2的信号确认端连接中央处理模块5;离线确认模块3 的离线信号输出端连接离线时长确认模块4,离线时长确认模块4的信号输出端连接中央处 理模块5,机器人设备电池电量检测反馈模块7的信号输出端连接中央处理模块5,机器人安 全设备自检模块8的信号输入端和控制信号输入端连接中央处理模块5,机器人设备安全控 制设备9的信号输入端连接中央处理模块5,离线系统自动休眠保护模块10的控制端连接中 3 CN 111571643 A 说 明 书 2/4 页 央处理模块5; 具体离线检测及控制过程如下:线检测模块1通过向网络基站发出信号,网络基站无信 号反馈则表示机器人设备不在线;在线确认模块2通过向网络基站发出信号,网络基站能反 馈信号,表示设机器人设备在线;离线确认模块3,通过对网络基站无反馈信号时长t,当时 长t超过设定的时间,则确认机器人设备离线,确认机器人设备离线后离线时长确认模块4 自动计时离线时长,并设定离线时长单位为t;待到达设定离线时长单位时,离线时长确认 模块4发出确认信号给中央处理模块5,中央处理模块5根据设定首先启动机器人安全设备 控制模块6,启动机器人设备电池电量检测反馈模块7监测机器人设备的电池电量,当电池 电量低于安全值时则通过中央处理模块5启动离线系统自动休眠保护模块10;当电池电量 在安全范围内时中央处理模块5启动机器人安全设备自检模块8对设备进行自检,监测设备 在离线状态下的各部件状态,并启动机器人设备安全控制设备9使得机器人设备在安全控 制范围内作业、工作。 启动机器人安全设备控制模块6是指定机器人设备在离线状态下自身的安全保 护,包括环境监测、作业工作速度降低。确保机器人设备在离线状态下的安全。 所述的中央处理模块5为多向输入输出控制芯片。 所述的机器人安全设备控制模块6包括停止作业指令、机器人部件收回并保护安 全指令。 所述的设定离线时长单位t,设定时长为3mit、5mit、10mit,根据设定的时长单位 t,进而通过中央处理模块5控制后续的工作程序:启动机器人安全设备自检模块8、启动机 器人设备安全控制设备9、启动离线系统自动休眠保护模块10等模块。 本发明的工作原理:本发明通过对机器人设备是否联网在线,并对在线进行多重 确认保证在线检测的准确率,然后根据离线时长通过中央处理模块启动个对应模块,从而 对机器人设备进行自检、重启、保护、并启动对应的保护设备,从而保护机器人设备在离线 状态下的工作和保护。 采用上述技术方案后,它能在离线状态下保证机器人安全稳定的运行,并保持安 全工作,它能适应各种恶劣的工作环境,特别是野外环境、地下环境、密闭无网络信号的小 范围空间等情况下,保持机器人离线稳定运行,也能对机器人起到安全保护作用,确保机器 人在离线状态下也能保持安全稳定。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可 以根据这些附图获得其他的附图。 图1是本发明的结构示意框图。 附图标记说明:在线检测模块1、在线确认模块2、离线确认模块3、离线时长确认模 块4、中央处理模块5、机器人安全设备控制模块6、机器人设备电池电量检测反馈模块7、机 器人安全设备自检模块8、机器人安全控制设备9、离线系统自动休眠保护模块10。 4 CN 111571643 A 说 明 书 3/4 页











