
技术摘要:
一种基于车辆状态信息的无人车队控制方法,通过第一辆车即头车且具有加速减速控制权,后续为从车且没有独立控制权,即不能够进行加速减速的处理,头车通过无线信道向后广播包括各辆从车的加速度控制信息的指派数据包;从车通过无线信道接收指派数据包,解析出各自对应 全部
背景技术:
车联网未来会成为物联网技术的重要组成部分。在车联网场景中,车辆会频繁地 传输状态信息,比如车辆的位置、与前车的距离、速度等状态信息。这些信息会被用于车联 网业务,比如编队行驶等等。车联网是延时敏感网络,因为车辆是高速移动的终端,且安全 是第一标准。传输重要的车辆状态信息的延时过高对于安全的驾驶是危险的。这些状态信 息在车联网中会通过无线接口进行发送和接收。无线信道是无线设备共享的。使用信道的 设备越多,无线信道资源就越可能不够,最终导致接收设备失败接收。 在车联网场景中,每一辆车都会接入车辆网络。通常认为车辆的信号发送的范围 是半径400m左右的圆。在交通密集的场景下,这个范围内会出现上百辆车辆。这么多车辆要 在低延时的情况下还能不冲突地使用无线信道,是一个艰难的任务。 欧洲电信标准化协会(ETSI)指出状态信息是周期产生发送的。这在众多研究文献 中都是按照找个标准进行实验的。所以状态信息在现有技术中是周期发送的,为了安全可 靠,这个发送的频率在ms这个级别。在LTE-V2V使用的Sidelink Mode 4中(这是LTE中专门 用于车到车通信的物理层技术),这个周期最小20ms最大1000ms。随着车辆数量的上升,频 繁地通信车辆状态信息会导致信道的拥塞,进而影响无线传输的可靠性,最终导致车辆网 驾驶的安全出现问题。
技术实现要素:
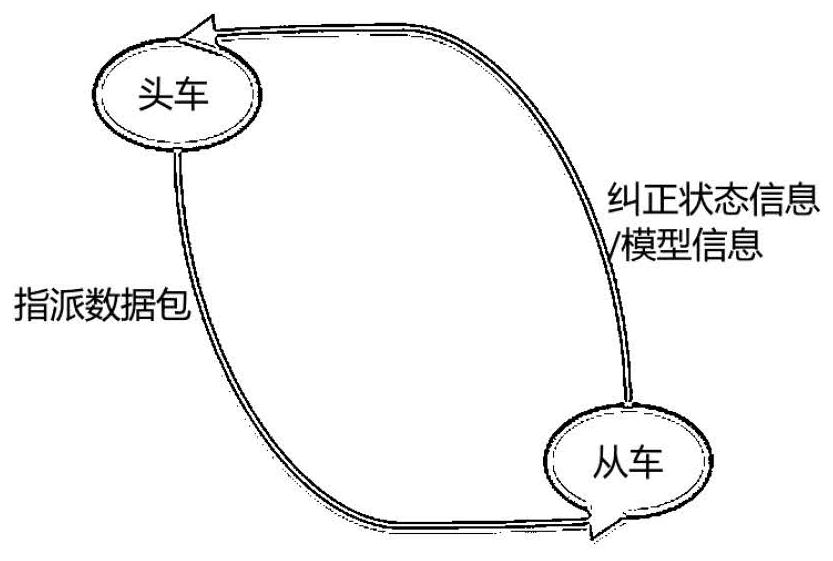
本发明针对现有技术存在的上述不足,提出一种基于车辆状态信息的无人车队控 制方法,通过传输模型来做到估计状态信息,通过状态信息纠正包来避免估计误差过大。 本发明是通过以下技术方案实现的: 本发明涉及一种基于车辆状态信息的无人车队控制方法,以车队方式行驶,第一 辆车即头车且具有加速减速控制权,后续为从车且没有独立控制权,即不能够进行加速减 速的处理,其中:头车通过无线信道向后广播包括各辆从车的加速度控制信息的指派数据 包;从车通过无线信道接收指派数据包,解析出各自对应的加速度信息并控制各自行驶状 态的同时将各自的纠正状态信息与模型信息周期地发送至头车。 所述的纠正状态信息是指:用于纠正的状态信息。状态信息是指:车辆运动过程中 的状态,包括但不限于:与前车的距离、本车辆的当前速度、本车辆的当前加速度。 所述的模型信息包括平行模型和模型参数。 本发明涉及一种实现上述方法的系统,包括:设置于头车的指派数据生成单元、指 派数据发送单元、状态信息接收单元、模型信息解析单元、误差纠正单元以及设置于从车的 平行模型参数生成单元、模型信息发送单元、状态检测单元,状态信息误差检测单元,状态 4 CN 111554083 A 说 明 书 2/4 页 信息发送单元,其中:误差纠正单元与状态信息接收单元相连并传输纠正状态信息,模型信 息解析单元与状态信息接收单元相连并传输估计状态信息,状态信息接收单元与指派数据 生成单元相连并传输结果状态信息,指派数据生成单元与指派数据发送单元相连并传输指 派数据包;平行模型参数生成单元与模型信息发送单元相连并传输模型信息,平行模型参 数生成单元与状态信息误差监测单元相连并传输模型信息,状态检测单元与状态信息误差 检测单元相连并传输状态信息,状态信息误差检测单元与状态信息发送单元相连并发送纠 正状态信息。 技术效果 本发明整体解决了在车辆编队行驶的场景下,减少上述状态信息的发送频率,同 时保证状态信息的准确,快速的传输的技术问题。 与现有技术相比,本发明减少状态信息发送频率,以此减少与现有技术相同的车 辆节点数量条件下的无线信道占用情况。 附图说明 图1为实施例编队行驶下车辆通信数据环示意图; 图2为实施例误差和数据包发送时刻图。











