
技术摘要:
本发明公布了一种利用涡轮叶片和机匣辐射信号差异测量叶片径向应变方法,属于航空发动机测量技术领域。通过安装在机匣上一个采集辐射信息的光学探头和转轴端部的转速同步传感器采集叶片转速信息和辐射信息,根据光学探头经过叶片和机匣壁时接收到的光强会发生明显变化 全部
背景技术:
随着航空发动机推重比的不断增加,涡轮进口温度不断攀升,目前涡轮叶片进口 温度最高达到2000~2250K。承受着高温度、高转速、复杂气动激振力和较大离心载荷复合 作用的航空发动机涡轮叶片,容易发生断裂故障,从而导致发动机和飞机严重事故。随着低 循环疲劳基础试验技术水平的提升,发动机涡轮叶片主要失效模式已由传统的静强度失效 转换为高温下的蠕变疲劳失效。在高温高转速的条件下,由于离心力极的作用涡轮叶片易 发生蠕变伸长,一旦蠕变缺陷达到某一程度,叶片的疲劳寿命缩短,甚至发生断裂,整个发 动机内部都会收到破坏。如果涡轮叶片纵向的蠕变伸长应变长度大于初始长度的0.5%,则 确定涡轮叶片已经超出其疲劳寿命。 因此,为了确保涡轮叶片工作在正常的工作状态,必须进行涡轮叶片径向应变测 量。为此国内外进行了广泛研究。现有技术中,测量应变的装置基本都是基于将应变计固定 于待测物体表面或两端的接触式测量装置。如专利200410002434.1中采用的径向应变测量 方法是将叶片尖端与底端固定测量伸长距离,这在高速旋转的涡轮叶片上是无法实施的。 遥测或滑环电阻应变仪是应用在实际工况中最广泛的方法,但由于热漂移和仪表附着技术 问题,该技术的应用范围被限制在900K左右。而且应变片安装费时费力,工作寿命较短,传 感器自身荷重与体积会影响叶片的空气动力学特性等原因,使得该技术的应用受到很大的 限制。传统的接触式应变测量方法也都存在引线困难的问题。
技术实现要素:
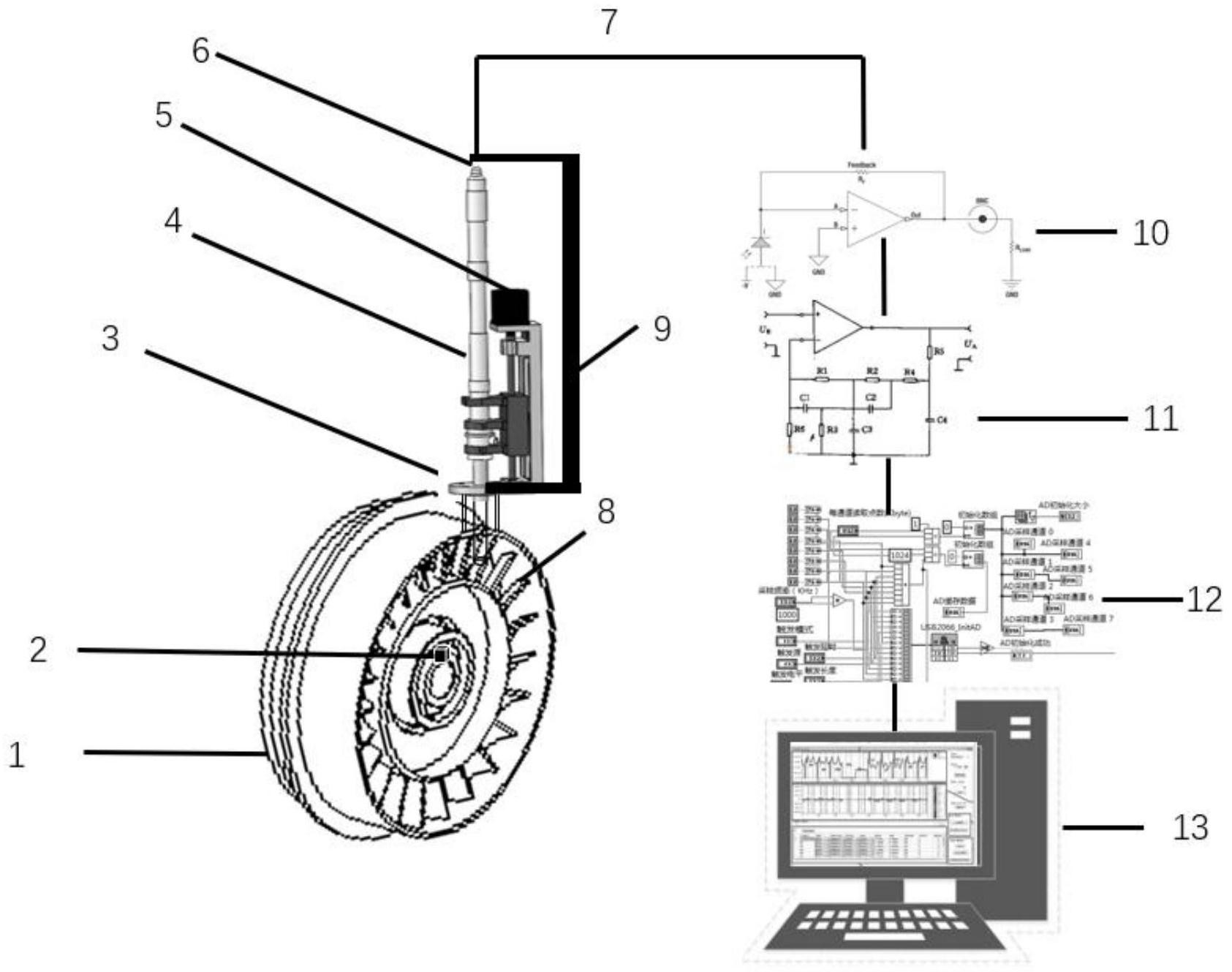
本发明所要解决的技术问题是采用光学监测的方法监测涡轮叶片叶尖径向应变, 实时分析实际工况下的涡轮叶片的热载荷及振动疲劳状况。测量装置包括一个安装在外机 匣上带有精密私伺服电机控制伸缩功能的用于收集辐射信号的光学探头、安装在转轴端部 的转速同步传感器、光电转换模块、放大滤波模块及数据采集与处理模块。采用光学探头深 入机匣实时采集辐射信息,经光纤传输至光电传感器转换成电信号并进行后续数据处理, 结合转速同步传感器的输出信号,得到涡轮叶片叶尖径向应变信息。 本发明所要实现的径向应变测量原理为:涡轮叶片在高温燃气的冲击下高速旋 转,安装在机匣上的光学探头接收来自旋转叶片的热辐射,由于转子叶片间的温度比叶片 温度低,每当光学探头采集到的光强会发生明显变化,探测器得到一组随时间变化的均匀 脉冲波形,如图2所示。一旦探针前端离开叶尖,反射镜正对的是温度较低的机匣壁,原来的 叶片高电平辐射信号变为了机匣壁的低电平信号,由此判断叶片径向伸长量。 当探针从叶根向外拔出的过程中,到探头前端正对叶尖时,采集到的依然是一组 3 CN 111551138 A 说 明 书 2/4 页 随时间变化的均匀脉冲波形,在探针继续向外拔出的过程中,由于各个叶片纵向伸长量不 一样,没有产生应变的叶片或者应变较小的叶片发出的辐射信号将不会被采集到,信号显 示为机匣壁的低电平,而应变较大的涡轮叶片辐射信号依然能被探头捕捉到,显示为高脉 冲信号,如图3所示。因此,显示为高脉冲信号所代表的涡轮叶片就是存在径向应变的叶片。 而叶片的顺序及索引可以根据转速同步信号判定。当探头从叶尖不断向外拔出的过程中, 高脉冲信号不断消失,将此时波形与上一次波形比较,就能知道哪一个叶片在上一次采集 过程中是叶尖位置,如图4所示,记录下当时安装探针在机匣上的法兰盘到探针后端的距离 Li,将这个距离与探针伸到叶位置时法兰盘到探针后端的距离L做差值,再减去叶片原长 L0,计算叶片发生蠕变的伸长距离。当探头拔出到当探头完全探测不到叶片表面时,即探头 完全暴露在燃气环境中,前端反射镜正对机匣壁,此时采集到的辐射信号只有图1的低脉冲 部分,如图5所示。最后,将叶片伸长距离代入应变计算公式,得到叶尖应变情况。 因而本发明技术方案为:一种利用涡轮叶片和机匣辐射信号差异测量叶片径向应 变方法,该方法包括: 步骤1:静止状态下测量出涡轮叶片叶根到叶尖的原始长度; 步骤2:待涡轮工作稳定,采用探头采集涡轮叶片叶根位置处的辐射信号,并记录 此时探头位置为初始位置; 步骤3:沿涡轮叶片径向方向向外移动探头,将探头移动靠近至按涡轮叶片原始长 度计算的叶尖位置,采集涡轮叶片旋转一周的辐射信号,确定出辐射信号中每个峰值对应 的涡轮叶片; 步骤4:将探头沿涡轮叶片径向方向向外移动一个步长,采集涡轮叶片旋转一周的 辐射信号,确定出此时辐射信号中每个峰值与上一次辐射信号的每个峰值的对应关系,确 定出是否有丢失的峰值;若有,执行步骤5,若没有,重复执行步骤4; 步骤5:确定出该丢失峰值对应的涡轮叶片,认为此时探头所处的位置为该丢失峰 值的涡轮叶片的叶尖位置,根据探头的初始位置和涡轮叶片原始长度计算出该涡轮叶片的 应变,然后重新执行步骤4,直到采集的辐射信号上不存在峰值,结束此次信号采集。 进一步的,步骤2中采样率大于160Khz,步骤3的具体方法: 步骤3.1:对采集到的信号进行傅里叶变化,首先滤除小于350Hz的信号,再滤除大 于13Khz的信号,最后采用幅度阈值计算出大于阈值的波峰所在位置区间; 步骤3.2:在步骤3.1得到的区间内计算每一个辐射电压减去该辐射电压值往前的 第三个辐射电压后再除以这两个辐射电压的采样时间间隔,得到曲线斜率,若斜率大于设 定的阈值0.5,认定此处为一个峰值; 步骤3.3:涡轮每转一圈获得一个转速同步信号,计算转速同步信号的两个脉冲之 间的时间间隔,除以叶片个数,为每个叶片信号对应的时间间隔;在得到峰值后,用每一个 峰值对应的时间减去上一个转速同步信号脉冲的时间,再除以每个叶片信号对应的时间间 隔值,得到对应叶片的编号。 本发明采用一个光学探头深入机匣,测量涡轮叶片叶尖辐射及燃气辐射脉冲波 形,由于机匣壁温度与叶片温度存在明显差异,据此来分离叶片信息,将叶片发生应变前的 距离与应变后的距离代入应变公式,计算出涡轮叶片纵向应变值。并根据每次采集过程的 低脉冲信号差异和转速同步信号相结合得到针对不同叶片的应变情况。 4 CN 111551138 A 说 明 书 3/4 页 附图说明 图1为应变测量装置示意图。 图2为探头采集到叶根到叶尖位置时的辐射信号图。 图3为探头在原叶尖位置后采集到的叶片发生纵向应变时的辐射信号图。 图4电机在图3采集信号后驱动到下一位置时的辐射信号图。 图5探头在全燃气环境中的辐射信号图。











