
技术摘要:
本发明公开了一种六自由度视觉位姿相对误差测量装置及测量方法,属于隧道建设管片拼装机技术领域。本发明通过在管片上设置ArUco码作为相机的靶标,并使其与角位台共面,调节角位台与旋转台使靶标坐标系与相机坐标系对齐。对比X向滑动模组、Y向滑动模组、Z向滑动模组、 全部
背景技术:
盾构机是一种用于隧道施工的专用工程机械,盾构施工法成本比较低、非常安全、 速度快、土方量少、机械化水平高,在一些地质复杂的情况下只能依托盾构。盾构集中了光 电技术、液压技术、传感器、电控技术为一体的大型机械设备,对周围的环境影响小,在城市 的地下综合管廊以及隧道建设过程中应用广泛。当盾构机向前推进一环,推进油缸缩回,盾 构机进入管片拼装模式,这时候暴露出来的土体需要及时的进行支护,管片拼装机将预制 好的混凝土管片以一定的顺序安装到刚开挖好的隧道表面形成衬砌,为盾构机在下一环掘 进的时候提供支撑点。作为盾构机重要的一部分,管片拼装的精度高低将直接影响着整个 地下掘进施工效率的提升。 在盾构法建设隧道中,管片的拼装一直是建设中十分重要的一个环节,它不仅起 到对已挖隧道的结构形状进行保护,防止隧道沉降,同时还可以防止地下水渗漏以及提供 施工更为安全的空间等作用。然而,目前国内大部分管片的拼装,其运输拼装全过程均需要 人工操纵管片拼装机,管片拼装的速度与精度都依赖于人的熟练程度。因此,管片拼装机的 自动化需求就逐渐呈现出来。管片的自动化拼装对于提高隧道的建设速度和减轻人的工作 强度具有重要意义。视觉测量技术是以计算机视觉为基础的新型测量技术,具备了非接触 式、测量范围广、信息量大、是其他类型的传感器所无法比拟的,在管片的自动化拼装领域 有广泛的应用。但视觉测量的精度难以保证,故提出一种六自由度视觉位姿相对误差测量 装置及测量方法。
技术实现要素:
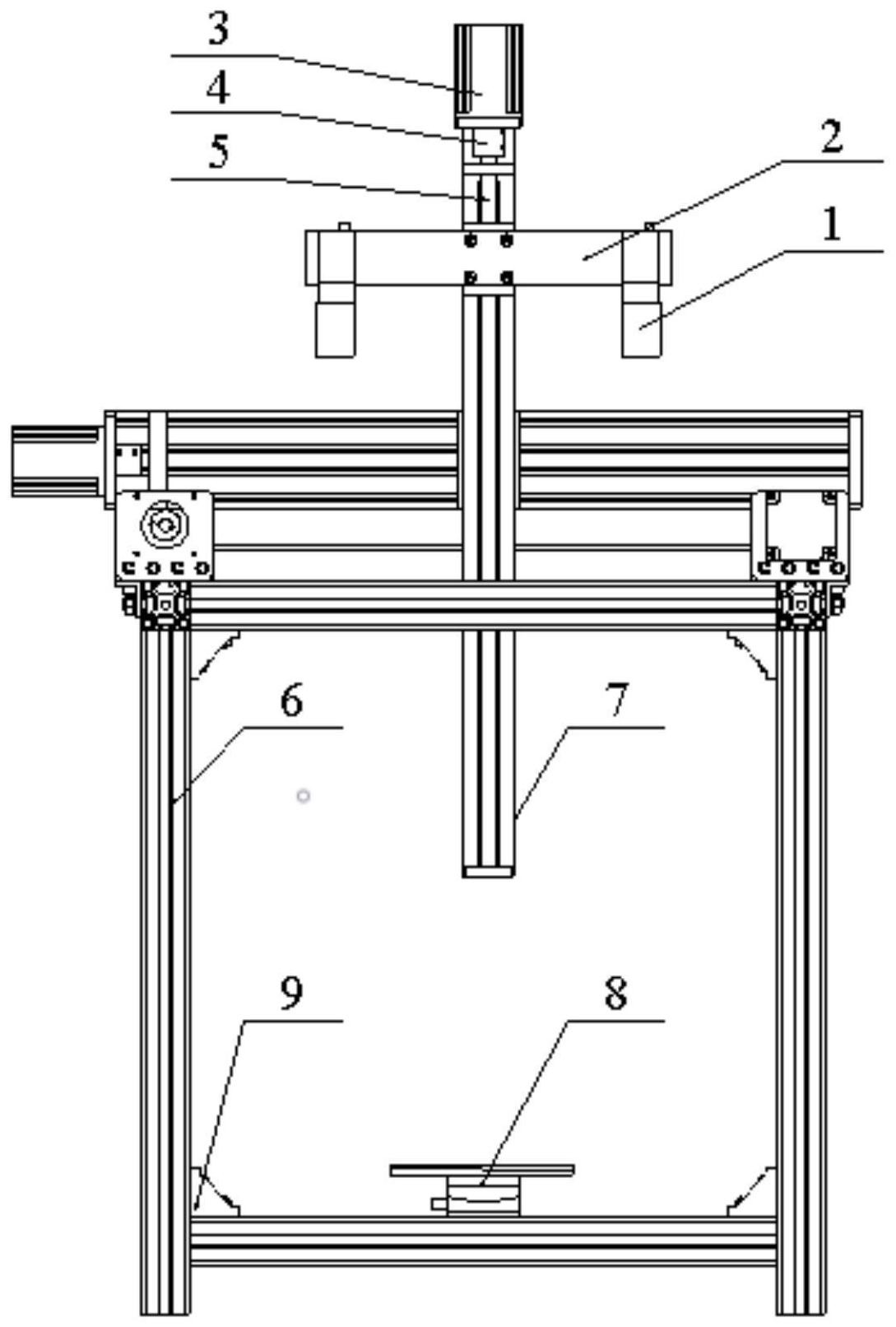
本发明提供了一种六自由度视觉位姿相对误差测量装置及测量方法,通过在管片 上设置ArUco码作为相机的靶标,并使其与角位台共面,调节角位台与旋转台使靶标坐标系 与相机坐标系对齐。对比X向滑动模组、Y向滑动模组、Z向滑动模组、角位台及旋转台与相机 测量的六自由度数值,即得到视觉相对测量误差。 为实现上述目的,本发明采用的技术方案是: 一种六自由度视觉位姿相对误差测量装置,所述的六自由度视觉位姿相对误差测 量装置包括X向滑动模组、Y向滑动模组、Z向滑动模组、工业相机1、支架6、旋转台、角位台和 放置板14。 所述的支架6为框架结构,支架6的每个顶角安装有支架连接角件9,用于增强结构 稳定性。 所述的X向滑动模组,共有两组,每组X向滑动模组包括X向滑块、丝杠5和模组底板 7;X向滑动模组通过连接件11固定安装在支架6上端;其中一组X向滑动模组安装有步进电 5 CN 111595235 A 说 明 书 2/5 页 机3,步进电机3通过联轴器4与丝杠5连接;步进电机3用于驱动丝杠5转动,丝杠5的转动带 动安装在丝杠5上的X向滑块沿X方向移动;每一组X向滑动模组的端部均安装有同步齿轮 12,同步齿轮12与丝杠5固定连接,两个同步齿轮12之间安装有同步带13;通过步进电机3驱 动、同步齿轮12和同步带13传动,实现两个X向滑块同步移动; 所述的Y向滑动模组包括Y向滑块、丝杠5和模组底板7,Y向滑动模组安装在两个X 向滑块上;Y向滑动模组上安装有步进电机3,步进电机3通过联轴器4与丝杠5连接,步进电 机3用于驱动丝杠5转动,丝杠5的转动带动安装在丝杠5上的Y向滑块沿Y方向移动。 所述的Z向滑动模组包括Z向滑块、丝杠5和模组底板7,Z向滑动模组通过连接板10 安装在Y向滑块上,Z向滑动模组上安装有步进电机3,步进电机3通过联轴器4与丝杠5连接, 步进电机3用于驱动丝杠5转动,丝杠5的转动带动安装在丝杠5上的Z向滑块沿Z方向移动。 所述的X向滑动模组、Y向滑动模组和Z向滑动模组的滑动方向两两垂直。 所述的工业相机1共有两台,安装在相机连接板2两端,相机连接板2中部与Z向滑 块连接。 所述的旋转台包括旋转台底座15、锁紧螺丝16、粗精调切换螺丝17、微分头18、刻 度盘19和旋转手柄20;旋转台底座15安装在支架6底端;旋转台底座15的侧边上设置有粗精 调切换螺丝17、刻度盘19和旋转手柄20。粗精调切换螺丝17的两侧安装有锁紧螺丝16和微 分头18。所述的锁紧螺丝16用于锁紧旋转台;所述的粗精调切换螺丝17用于切换调节模式, 当粗精调切换螺丝17松开时旋转手柄20处于工作状态,当粗精调切换螺丝17锁紧时微分头 18处于工作状态。所述的刻度盘19安装在旋转台底座15上。 所述的角位台安装在旋转台上,角位台设置有用于驱动角位台转动的角位台Y轴 调节螺丝21和角位台X轴调节螺丝22。 所述的放置板14安装在角位台之上。 进一步地,所述的X向滑动模组通过12个直角连接件与支架连接。 进一步地,所述支架6由40x40mm规格的铝型材组成,用于安装T型螺栓。 进一步地,所述的步进电机3步距角为1.8度,为减弱消除步进电机的低频振动,驱 动器细分为2000。 进一步地,所述的工业相机1为1920x1200分辨率的RGB相机,镜头为8mm定焦镜头。 进一步地,所述的角位台调整范围为-10~10度,精度为0.1度。 进一步地,所述的旋转台调整范围为0~360度,精度为0.1度。 本发明实例采用两个工业相机对靶标同时对靶标进行测量,即双目测量。关于靶 标坐标原点在相机坐标系位置的求取采用基于射线交汇法的双目模型。以下对该方法作进 一步说明。设世界坐标系为OXYZ,设世界坐标系任一点P点的坐标为(Xw,Yw,Zw),点P在左右 相机的成像平面的坐标分别为P1和P2,两摄像机的投影矩阵分别为: 6 CN 111595235 A 说 明 书 3/5 页 由相机坐标系与世界坐标系之间的转换关系: 其中M1=m1R1T1,M2=m2R2T2;m1、m2分别为左右摄像机的内参矩阵,R1、T1分别为左摄 像机坐标系相对于世界坐标系的旋转矩阵和相对于原点之间的平移向量,R2、T2分别为右摄 像机坐标系相对于世界坐标系的旋转矩阵和相对于原点之间的平移向量,z1和z2分别为空 间点P在两台相机的光心坐标系中沿光轴方向的坐标值。 设左摄像机坐标系与世界坐标系重合,则此时: 将(5)(6)式代入(3)(4)式即可求得靶标坐标原点在左相机坐标系下的坐标。 关于靶标坐标系相对相机坐标系三个轴转角的测量采用n点透视问题的解决方 案,具体的是通过相机识别靶标图像并获取靶标的四个特征点,即可得到四个特征点在图 像坐标系的坐标,靶标特征点的世界坐标已知,采用透视问题即可解得靶标坐标系相对相 机坐标系三个轴转角。 通过以上双目汇聚模型和n点透视问题即可求得靶标相对于相机坐标系的六自由 度姿态,由于靶标固定于角位台的放置板14之上,故角位台旋转台的姿态即为靶标的姿态。 以上所述模组与旋转台在安装时不可避免存在安装误差,在具体的测量过程中可先由相机 获取靶标的六自由姿态,在测量一个自由的的误差时,可调节旋转台、角位台、X向滑动模 组、Y向滑动模组和Z向滑动模组使其剩余的无关自由度数值为零,即可精确的测量出每个 自由度的相对误差。 本发明具有以下有益效果: 1、相机可通过特定算法测量出靶标的六自由姿态,由于模组及支架安装的误差不 可避免会产生系统误差。通过调节角位台和旋转台可将靶标坐标系与相机坐标系对齐。 7 CN 111595235 A 说 明 书 4/5 页 2、由于系统具有较高的测量精度,故可为视觉六自由姿态测量相对误差,提高视 觉测量的精度和可靠性。 附图说明 图1为本发明实施例整体结构主视图; 图2为本发明实施例整体结构左视图; 图3为本发明实施例整体结构俯视图; 图4为本发明实施例整体结构后视图; 图5为本发明实施例旋转台和角位台视图; 图6为本发明实施例旋转台和角位台补充视图。 图7为本发明实施例相机识别的靶标ArUco码。 图中:1工业相机;2相机连接板;3步进电机;4联轴器;5丝杠;6支架;7模组底板;8 角位台和旋转台;9支架连接角件;10连接板;11连接件; 12同步齿轮;13同步带;14放置板;15旋转台底座;16锁紧螺丝; 17粗精调切换螺丝;18微分头;19刻度盘;20旋转手柄;21角位台Y轴调节螺丝;22 角位台X轴调节螺丝。











