
技术摘要:
本发明涉及机械采样领域,具体公开一种工业机器人专用取样机械手,包括机械手部件、第一关节臂、第二关节臂和第二液压缸,所述第一关节臂左端活动连接机械手部件,所述第一关节臂另一端活动连接第二关节臂,所述第二液压缸一端活动连接第一关节臂后端,所述第二液压缸 全部
背景技术:
机械手臂是一种用于机械加工与生产的常见设备,能够代替人们完成零件放置, 螺丝锁定,电路板切割等工作,在增加工作效率的同时还能大大降低了人们的劳动强度。在 目前的机械行业中,对产品的取样以及送样越发频繁,可是产品的取样以及送样大多都是 利用人工操作,机械手虽然可做到对产品进行取样,但大多效率较为低下,且取样之后不能 进行送样。 现有技术中采用不同的技术手段来改善取样机械手,比如CN201720374924.7提出 一种智能取样机械手,包括支架,所述支架上安装第一电机安装架,所述第一电机安装架内 安装第一旋转电机,所述第一旋转电机驱动端安装第一安装块,所述第一安装块上固定旋 转板,所述旋转板上固定第二电机安装架,所述第二电机安装架内安装第二旋转电机,所述 第二旋转电机驱动端安装第二安装块,所述第二安装块上固定第一驱动架,所述第一驱动 架内安装第一液压缸,所述第一液压缸驱动端固定延展臂,所述延展臂另一端固定第一配 装件,所述第一配装件内安装第二液压缸,所述第二液压缸底端固定第二配装件,所述第二 液压缸驱动端安装承载架。 该技术方案通过先将装置空闲处安装可编程系列控制器和2台电机驱动器和3台 继电器,以MAM-200的控制器为例,将该型号控制器的输出端通过导线分别与2台电机驱动 器和3台继电器的输入端连接,本领域人员在将2台电机驱动器通过导线分别与第一旋转电 机和第二旋转电机的接线端连接,同时将3台继电器通过导线分别与第一液压缸、第二液压 缸和第三液压缸自带的电磁阀连接。本领域人员通过控制器编程后,完全可控制各个电器 件的工作顺序,具体工作原理如下:首先启动第一旋转电机3,第一旋转电机3驱动端带动旋 转板5旋转,调整承载架15的方向,同时启动第二旋转电机7,第二旋转电机7驱动端带动第 一液压缸10进行转动调整,同时启动第一液压缸10调整第二液压缸13和承载架15的位置, 同时启动第三液压缸18,第三液压缸18驱动端推动第二配装件14,调整第二液压缸13的角 度,再启动第二液压缸13,第二液压缸13驱动端带动承载架15进行取样,然后在启动第一旋 转电机3、第二旋转电机7、第一液压缸10、第二液压缸和第三液压缸18进行组合移动将样品 移动至存放位置。 该技术方案的缺陷在于:机械手操作工作范围小,不能根据抓取的物体形状大小 调节机械手指,特别是针对性物体在较高位置时,机械手抓取不到的情况,效率低。
技术实现要素:
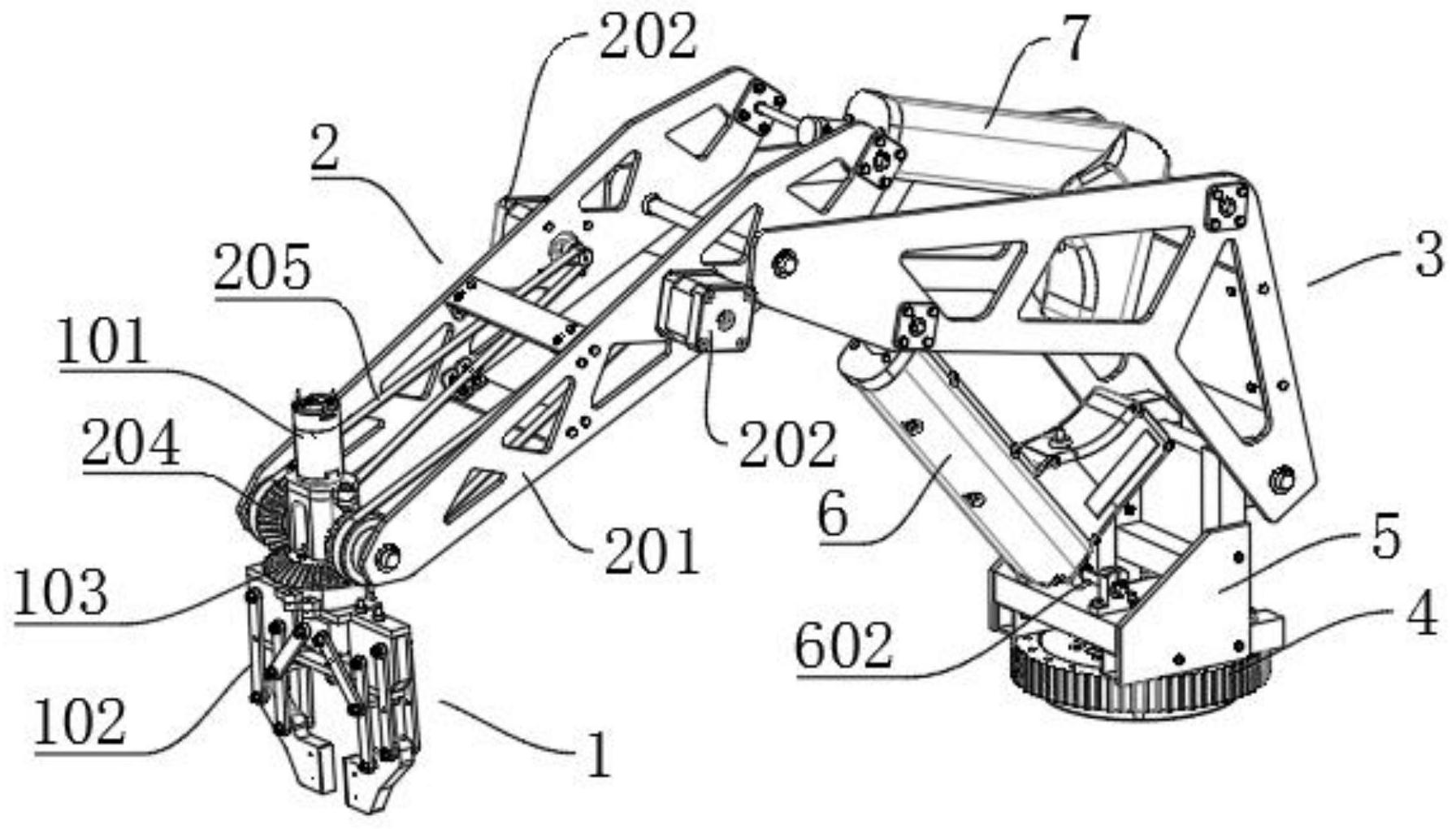
本发明所要解决的技术问题:提供一种工业机器人专用取样机械手,设置两部分 关节臂和机械手部件,灵活调节操作取样形态适应不同工作场景,提高取样效率。 本发明的基本方案为:一种工业机器人专用取样机械手,包括机械手部件、第一关 3 CN 111604896 A 说 明 书 2/4 页 节臂、第二关节臂和第二液压缸,所述第一关节臂左端活动连接机械手部件,所述第一关节 臂另一端活动连接第二关节臂,所述第二液压缸一端活动连接第一关节臂后端,所述第二 液压缸另一端连接所述第二关节臂中间部; 还包括第一液压缸和固定支架,所述固定支架的上端连接第二关节臂和所述第一 液压缸,且第一液压缸的另一端活动连接所述第二关节臂,所述固定支架的下端设置有旋 转齿轮。 传统的机械手,多采用抓取部位调节张合的大小达到适应各种物体,只适用于连 续抓取特定位置的样本,但大多数实际情况由于需取样的物品存放地方有可能不一致,对 机械手可调位置要求教高,通过在装置上设置第一关节臂、第二关节臂和机械手部件,可实 现上下灵活调节机械手,旋转齿轮的设置可以整体调节操作取样形态适应不同工作场景, 提高取样效率。 优选地,还包括传动皮带,所述第一关节臂两边均为第一关节臂侧板,所述两块第 一关节臂侧板中部均设置有第二电机,所述第一关节臂侧板前端设置有第二锥齿轮,所述 第二锥齿轮通过传动皮带与第二电机连接。 两个电机的设置,带动两条传动皮带,形成力偶,高效实现精确控制。 优选地,还包括轴一和轴二,所述轴一穿过第一液压缸的上端,所述轴一的两端与 第二关节臂两侧连接,所述轴二穿过第一液压缸的下端,所述轴二的两端与固定支连接。 优选地,还包括轴三和轴四,所述轴三穿过第二液压缸的上端,所述轴三的两端与 第一关节臂两侧连接,所述轴四穿过第二液压缸的下端,所述轴四的两端与第二关节臂两 侧连接。 优选地,还包括连接固定条和连接固定板,所述固定连接条左右两边连接第一关 节臂侧板,所述连接固定板左右连接第二关节臂两侧面。 优选地,所述机械手部件包含第一电机组件、连接块和抓取手指,所述连接块的顶 端连接所述第一电机组件,所述连接块外壁设置有多个手指连接条,所述手指连接条的下 端连接抓取手指。 当操作取样物体瞄准后,该方案可以让机械手部件单独根据物件调整抓取手指的 张合度,实现精确抓取。 优选地,所述电机组件设置有与第二锥齿轮咬合的第一锥齿轮,且第一锥齿轮与 第二锥齿轮垂直咬合。 锥齿轮相对于其它类型的齿轮而言,锥齿轮传动效率更高,能耗损失更小,所承载 的力矩更大,可靠性能更好。 优选地,所述旋转齿轮与所述固定支架的中心轴线重合。 通过在固定支架设置旋转齿轮,整个机械手可以实现360°旋转,对机械手四周需 要取样的物体迅速高效地做出操作反应,该技术方案比普通的机械手更高效,在现实作业 中更为实用。 优选地,所述第一关节臂侧板开设有多个三角形通孔。 多个三角形通孔的开设,在不影响机械手整体可靠性的情况下,第一关节臂得到 轻量化,在机械手操作时更为灵活,也便于生产、组装和检修。 优选地,所述第二关节臂呈倒三角形。 4 CN 111604896 A 说 明 书 3/4 页 倒三角形的设计,使第二关节臂更加稳固。 本发明的工作原理及优点在于:该工业机器人专用取样机械手,不仅可以实现对 产品的取样,也可在取样过程中根据取样物的位置,大小灵活调整机械手形态,适用范围 广,另外该装置在利用机械手抓取样品时其稳定性也有所改进,大大降低了在抓取样品过 程中样品从机械爪中滑落的机率。 附图说明 图1为本发明一种工业机器人专用取样机械手立体图(视角一); 图2为本发明一种工业机器人专用取样机械手立体图(视角二); 图3为本发明一种工业机器人专用取样机械手正视图; 图4为本发明一种工业机器人专用取样机械手俯视图; 图5为本发明一种工业机器人专用取样机械手仰视图; 图6为本发明机械手部件立体图; 图7为本发明第一电机组件正视图; 图8为本发明第二关节臂正视图; 图9为本发明第一关节臂侧板正视图。 附图中涉及到的附图标记有: 机械手部件1,第一电机组件101,连接块102,第一锥齿轮103,抓取手指104,手指 连接条105,滑动块106,螺杆107,第一关节臂2,第一关节臂侧板201,第二电机202,三角形 通孔203,第二锥齿轮204,传动皮带205,连接固定条206,第二关节臂3,连接固定板301,多 边形通孔302,旋转齿轮4,固定支架5,第一液压缸6,轴一601,轴二602,第二液压缸7,轴三 701,轴四702。











