
技术摘要:
本发明涉及机械设备技术领域领域,具体公开一种工业机器人专用液压手腕,包括前后移动装置、上下移动装置、旋转装置、抓紧放松装置和底座支架,所述前后移动装置底端铰连接底座支架,所述前后移动装置顶端铰连接上下移动装置,所述上下移动装置的另一端活动连接旋转装 全部
背景技术:
在现代化的建筑施工过程中,液压手腕(也称万向快接)是一种新型挖掘机功能属 具,安装在挖掘机工作装置和工具头之间,其功能特点:利用液压缸实现下接属具绕X轴± 40°摆动功能。利用液压马达驱动蜗轮蜗杆实现绕Z轴±360°回转功能,并具备自锁性能。利 用快换装置实现与液压剪、液压夯、液压钻、挖斗等不同用途的工具头快速更换连接。主机 作业范围扩大、功能得到延展,改善工作环境、减轻劳动强度,显著提高工作效率和经济效 益。整机主要由机械本体,液压系统和控制系统组成,左右手柄向控制器发送信号,控制器 实现各项性能调节并控制液压阀组,实现左右旋转、倾斜等复合动作。液压马达驱动蜗轮蜗 杆实现下接机具±360°全回转,由于导程角的合理选择使蜗轮具有一定的自锁性能,液压 油缸的伸缩实现下接机具±40°摆动。通过油缸带动快换机构伸缩,实现与属具的快换功 能,并附加液压锁或安全弹簧,确保油缸在卸压状况下,属具不会脱落,提高产品安全性。 现 有技术中 采 用不同的 技术手段来改 善施工设备 作业效 率 ,比 如 , CN201621272518.1提出一种水下液压机械手,包括底座支架、前后移动装置、上下移动装 置、抬头摆动装置和抓紧放松装置,所述底座支架是固定整个机械手的部件; 所述前后移动装置包含前后移动臂铰支座(2)、短轴(3)、前后移动臂(4)、前后移 动液压缸(27)、短轴十四(26)、短轴十五(28)和前后移动液压缸铰支座(29);前后移动液压 缸(27)和前后移动臂(4)通过短轴十四(26)、轴承连接;前后移动臂(4)通过短轴(3)与前后 移动臂铰支座(2)进行连接;前后移动液压缸(27)通过前后移动液压缸铰支座(29)、短轴十 五(28)与底座支架(1)连接;所述上下移动装置包含上下移动液压缸(6)、上下移动液压缸 执行杆(7)、短轴三(8)、短轴四(9)和上下移动臂(10);上下移动液压缸(6)和上下移动臂 (10)通过短轴三(8)和轴承连接;上下移动臂(10)与前后移动臂(4)通过短轴四(9)连接;所 述抬头摆动装置包含抬头摆动液压缸(12)、抬头摆动臂(14)、短轴六(13)和短轴十三(25); 抬头摆动液压缸(12)和抬头摆动臂(14)通过短轴六(13)、轴承进行连接;抬头摆动臂(14) 和上下移动臂(10)通过短轴十三(25)、轴承进行连接;所述抓紧放松装置包含松紧液压缸a (15)、松紧机械爪a(18)、松紧机械爪b(19)、松紧液压缸b(22)、短轴七(16)、短轴八(17)、短 轴九(20)、短轴十(21)、短轴十一(23)和短轴十二(24);松紧机械爪a(18)和松紧液压缸a (15)通过短轴七(16)和轴承与安装在抬头摆动臂上的铰支座进行连接;松紧机械爪b(19) 和松紧液压缸b(22)也通过短轴十(21)和轴承与安装在抬头摆动臂上的铰支座进行连接; 两组松紧机械爪相对运动实现抓紧或者放松。 该技术方案的缺陷在于,由于液压手腕抓取物体时自由度较少,对抓取放置在复 杂区域的物体时不能有效完成操作。 3 CN 111604876 A 说 明 书 2/4 页
技术实现要素:
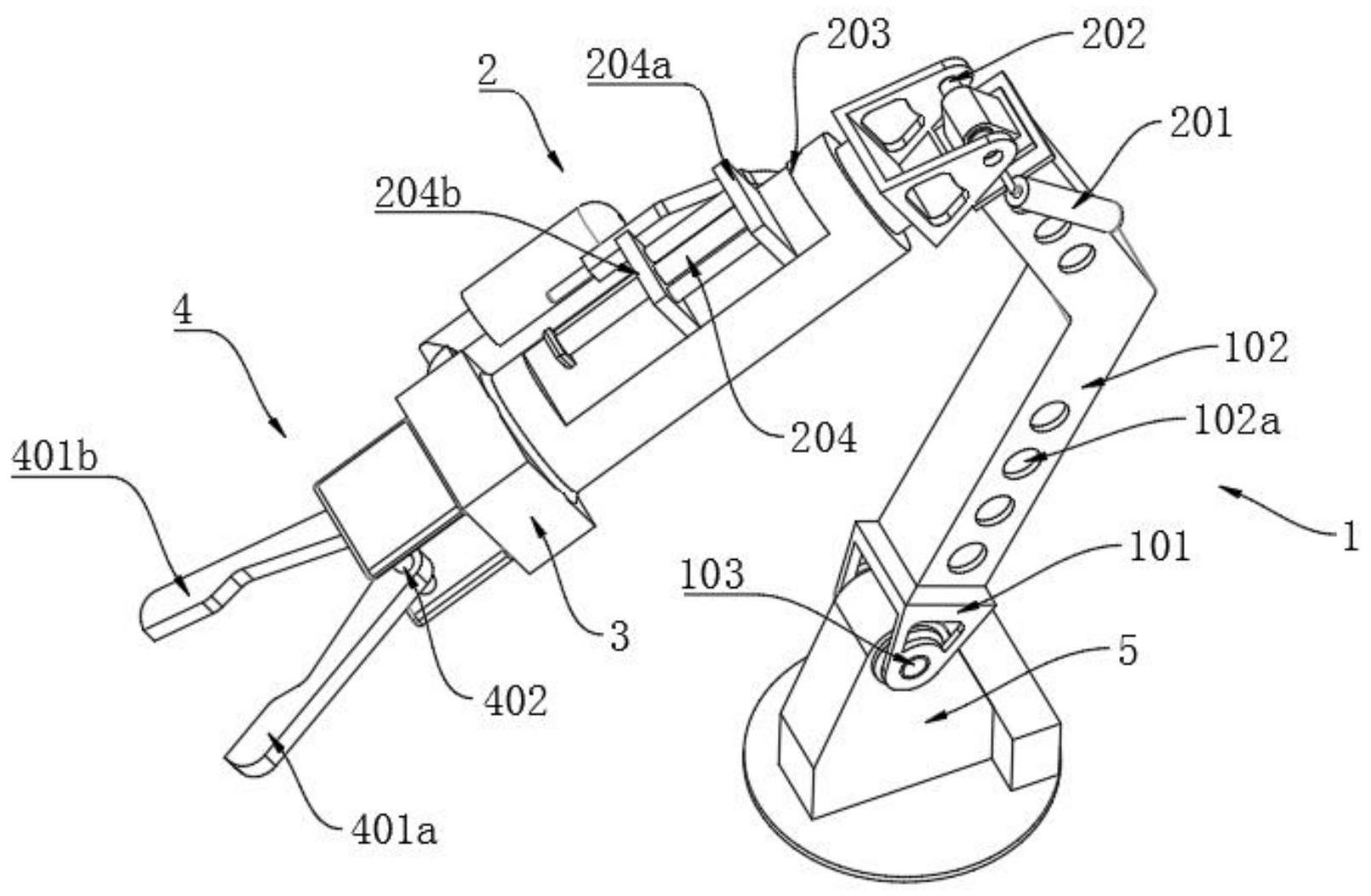
本发明所要解决的技术问题:提供一种工业机器人专用液压手腕,旋转装置的加 入提升液压手腕旋转自由度,能够多方位抓取物体。 本发明的基本方案为:一种工业机器人专用液压手腕,包括前后移动装置、上下移 动装置、旋转装置、抓紧放松装置和底座支架,所述前后移动装置底端铰连接底座支架,所 述前后移动装置顶端铰连接上下移动装置,所述上下移动装置的另一端活动连接旋转装置 的上端,所述旋转装置的下端活动连接抓紧放松装置,所述底座支架连接于车体上端。 该方案可通过前后移动装置、上下移动装置、旋转装置和抓紧放松装置几个部分 的协同合作,实现可移动,多方位抓取物体。 优选地,前后移动装置包含前后移动臂支座、短轴一和前后移动臂,所述前后移动 臂支座通过短轴一与底座支架铰连接。 优选地,所述上下移动装置包含上下移动液压缸、上下移动液压缸执行杆、短轴二 和上下移动臂,所述上下移动液压缸和上下移动臂与前后移动臂通过短轴二连接,所述上 下移动液压缸执行杆设置在上下移动臂中部。 优选地,所述抓紧放松装置包含左松紧机械爪、右松紧机械爪和短轴三,所述左松 紧机械爪和右松紧机械爪通过短轴三安装在旋转装置下端,两松紧机械爪相对运动实现抓 紧或者放松。 优选地,所述前后移动臂为中空柱形,且所述前后移动臂两侧开设有圆形通孔,所 述前后移动臂呈弯折状,且弯折角度为45°。 优选地,还包括顶块和底块,所述顶块固定连接于所述上下移动臂中部,所述上下 移动液压缸执行杆的上端连接于所述顶块,所述上下移动液压缸执行杆的另一端垂直穿过 所述底块,且上下移动液压缸执行杆另一端可在所述底块内来回伸缩。 优选地,所述车体下方设有车轮,所述车轮外形呈为齿轮状。 齿轮状的车轮设计可以使得机器人在复杂的地形地貌中作业,提升了设备的可靠 性。 优选地,所述车体上方设有摄像头,所述摄像头可360°旋转,所述车体前端设置有 两个对称的探照灯。 全景摄像头和探照灯的加入让远程操作人员随时观察设备作业的情况,便捷性更 强。 优选地,所述车体表面有一层防腐和防氧化层。 在深水或者含水量较多的恶劣环境当中,对于需要拾取相应的目标物存在一定的 技术难题,还有水的腐蚀和水底压力等不利的因素干扰,通过在车体表面有一层防腐和防 氧化层可以有效的防止设备被水腐蚀或氧化。 本发明的工作原理及优点在于:提供一种工业机器人专用液压手腕,在车体上部 安装机械液压手腕,可通过前后移动装置、上下移动装置、旋转装置和抓紧放松装置几个部 分的协同合作,实现可移动,多方位抓取物体。发明结构简单、性能好、工作效率高,本发明 可以有效的防止设备被水腐蚀或氧化。 4 CN 111604876 A 说 明 书 3/4 页 附图说明 图1为本发明一种工业机器人专用液压手腕立体图; 图2为本发明一种工业机器人专用液压手腕正视图; 图3为本发明一种工业机器人专用液压手腕俯视图; 图4为本发明一种工业机器人专用液压手腕立体图(包含车体); 图5为上下移动臂俯视图; 图6为前后移动臂立体图。 附图中涉及到的附图标记有: 前后移动装置1,前后移动臂支座101,前后移动臂102,圆形通孔102a,短轴一103, 上下移动装置2,上下移动液压缸201,短轴二202,上下移动臂203,上下移动液压缸执行杆 204,顶块204a,底块204b,旋转装置3,抓紧放松装置4,左松紧机械爪401a,右松紧机械爪 401b,短轴三402,底座支架5,车体6,车轮601,摄像头602,探照灯603。











