
技术摘要:
本发明公开了一种用于人工智能的仿生支撑结构和仿生机器人,所述仿生支撑结构用以支撑带动机体运动,所述仿生支撑结构包括:驱动组件和支撑组件,驱动组件包括第一驱动件和第二驱动件,第一驱动件和第二驱动件用以连接于机体;支撑组件包括第一支撑腿和第二支撑腿,第 全部
背景技术:
随着智能设备技术的快速发展,仿生类的机器人逐渐向生产生活的各个应用领域 扩展。但是目前的仿生类机器人能够执行的动作单一,随着应用领域的扩展,单一动作已经 无法适应使用环境的要求。 上述内容仅用于辅助理解本申请的技术方案,并不代表承认上述内容是现有技 术。
技术实现要素:
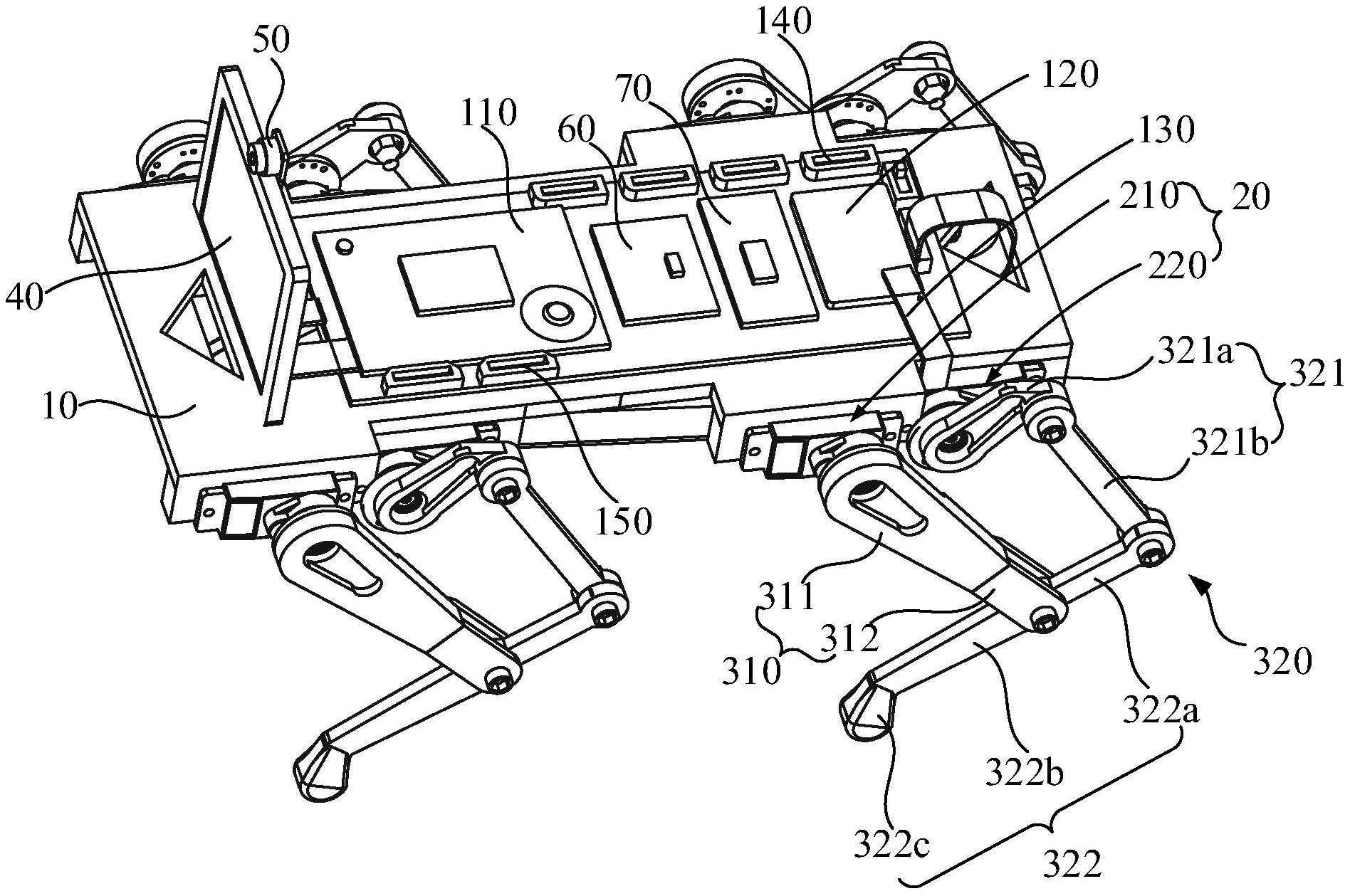
基于此,针对目前的仿生类机器人动作单一,无法适应复杂使用环境要求的问题, 有必要提供一种用于人工智能的仿生支撑结构和仿生机器人,旨在能够具有多个执行动 作,有效适应复杂使用环境的要求。 为实现上述目的,本发明提出的一种用于人工智能的仿生支撑结构,用以支撑带 动机体运动,所述仿生支撑结构包括: 驱动组件,所述驱动组件包括第一驱动件和第二驱动件,所述第一驱动件和第二 驱动件用以连接于所述机体;和 支撑组件,所述支撑组件包括第一支撑腿和第二支撑腿,所述第二支撑腿包括小 腿部、连接部以及连接于所述小腿部和所述连接部的第一关节部; 所述第一支撑腿的一端转动连接于所述第一驱动件,所述第一支撑腿的远离所述 第一驱动件一端转动连接于所述小腿部; 所述连接部的背离所述第一关节部的一端转动连接于所述第二驱动件,所述小腿 部背离所述第一关节部的一端用以与行走面抵接。 可选地,所述连接部包括摆杆和连杆、以及连接于所述摆杆和所述连杆的第二关 节部,所述摆杆背离所述第二关节部一端转动连接于所述第二驱动件,所述连杆背离所述 第二关节部一端转动连接于所述小腿部。 可选地,所述小腿部还包括连接段和支撑段,所述连接段一端转动连接于所述连 杆,所述连接段另一端连接于所述支撑段,所述支撑段的横截面积大于所述连接段的横截 面积,所述第一支撑腿转动连接于所述连接段和所述支撑段之间连接位置。 可选地,所述小腿部还包括足底,所述足底设置于所述支撑段远离所述连接段一 端,所述足底用于抵接行走面并承载所述机体的压力,所述足底施加于所述行走面的压力 的方向和所述行走面具有夹角,所述夹角为ɑ,则45°≤ɑ≤90°。 可选地,所述足底面向所述行走面的端面为半圆形。 可选地,所述摆杆、所述连杆和所述小腿部的延伸长度依次增加。 4 CN 111547155 A 说 明 书 2/8 页 可选地,所述第二支撑腿的长度长于所述第一支撑腿的长度。 可选地,所述第一支撑腿包括主腿部和夹持部,所述主腿部一端连接于所述第一 驱动件,所述夹持部设于所述主腿部背离所述第一驱动件一端,所述夹持部包括第一夹持 板和第二夹持板,所述第一夹持板和所述第二夹持板之间形成加持空间,所述小腿部设于 所述加持空间,所述第一夹持板和所述第二夹持板以及对应所述小腿部的位置设有转轴 孔,所述转轴孔内设有连接于所述第一夹持板和所述第二夹持板、以及所述小腿部的转轴。 可选地,所述第一驱动件包括设于所述机体的第一舵机,所述第二驱动件包括设 于所述机体的第二舵机,所述第一舵机和所述第二舵机沿所述机体的行进方向间隔排布, 所述驱动组件还包括主控板、舵机信号转接板和舵机信号线,所述主控板和所述舵机信号 转接板电性连接,所述舵机信号线一端连接于所述舵机信号转接板,所述舵机信号线另一 端连接于所述第一舵机和所述第二舵机。 此外,为了实现上述目的,本发明还提供一种仿生机器人,所述仿生机器人包括机 体和至少四个如上文所述仿生支撑结构,所述仿生支撑结构对称设置于所述机体两侧。 可选地,所述仿生机器人包括可转动云台,所述仿生机器人还包括第三驱动件,所 述第三驱动件转动设置于所述云台,所述仿生机器人还包括第四驱动件,所述第四驱动件 设置于所述第三驱动件,所述仿生机器人还包括显示屏幕和摄像头,所述摄像头设置于所 述显示屏幕,所述显示屏幕转动设置于所述第四驱动件,所述第四驱动件带动所述显示屏 幕上下转动,所述第三驱动件带动所述显示屏幕左右转动。 可选地,所述仿生机器人还包括设于所述机体的无线连接模块。 本发明提出的技术方案中,第一驱动件驱动第一支撑腿转动,第二驱动件驱动第 二支撑腿转动。第一支撑腿还转动连接于第二支撑腿的小腿部,也就是说,第一驱动件还能 够协助第二驱动件一同驱动第二支撑腿的小腿部转动。第二支撑腿还包括连接于小腿部和 连接部的第一关节部。也就是说,第一支撑腿、小腿部和连接部依次是转动连接的,在第一 驱动件驱动第一支撑腿转动不同角度,以及第二驱动件驱动连接部转动不同角度时,第一 支撑腿、小腿部和连接部形成多种形状,实现多个执行动作,进而有效适应复杂使用环境的 要求。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1为本发明用于人工智能的仿生支撑结构一实施例的结构示意图; 图2为图1中第一支撑腿和第二支撑腿的结构示意图; 图3为图1中用于人工智能的仿生支撑结构另一视角的结构示意图; 图4为图3中A部分放大的结构示意图; 图5为图1中用于人工智能的仿生支撑结构下蹲的结构示意图; 图6为图1中用于人工智能的仿生支撑结构跳跃的结构示意图; 图7为图1中足底在水平的行走面上的示意图; 5 CN 111547155 A 说 明 书 3/8 页 图8为图1中足底在倾斜的行走面上的示意图; 图9为本发明用于人工智能的仿生支撑结构另一实施例的结构示意图。 附图标号说明: 标号 名称 标号 名称 10 机体 312a 第一夹持板 110 主控板 312b 第二夹持板 120 舵机信号转接板 320 第二支撑腿 130 舵机信号线 321 连接部 140 第一接线口 321a 摆杆 150 第二接线口 321b 连杆 20 驱动组件 322 小腿部 210 第一驱动件 322a 连接段 220 第二驱动件 322b 支撑段 230 舵机输出轴 322c 足底 240 舵盘 330 第一关节部 250 第三驱动件 340 第二关节部 260 第四驱动件 40 显示屏幕 30 支撑组件 50 摄像头 310 第一支撑腿 60 加速度传感器 311 主腿部 70 无线连接模块 312 夹持部 90 行走面 本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。











