
技术摘要:
本申请公开了一种平行驾驶车辆控制参数自适应标定方法及系统,涉及控制参数标定技术领域,该方法包括:驾驶模拟器发送模拟信号参数至平行驾驶控制器;平行驾驶控制器控制实车根据模拟信号参数行驶,并获取行驶数据发送至服务器;服务器根据整车参数和行驶数据,构建卡 全部
背景技术:
平行驾驶最初想法形成于20世纪90年代中期,近年来,随着互联网、大数据、云计 算、物联网以及人工智能等技术的发展,也推动了平行驾驶的发展。平行驾驶系统中的车辆 可以是多种类型的车辆,如载人观光车,载货的无人贩卖车,工程车等。 相关技术中,通常利用实车测试直接确定平行驾驶舱台架的模拟参数与实际被控 车辆控制参数的关系,然后根据该关系进行平行驾驶。但并未考虑实际行车过程中,不同整 车质量和行驶坡度对实际控制参数的影响。 实际驾驶过程中,如载货的无人贩卖车等,其整车质量会随着时间而产生较大的 变化,而远程操纵车辆的驾驶员因处在不真实的驾驶环境下,对整车质量变化无直接感觉, 则容易出现转向,与加减速不合理的操作,从而引发安全事故或是低效行车。 另外,远程操纵车辆的驾驶员也不处于真实的道路环境中,靠环境视频的感观,无 法获知道路坡度信息,也容易在上下坡,尤其是下坡时,出现如加速过猛的危险操作,或是 加速过缓的低效操作。
技术实现要素:
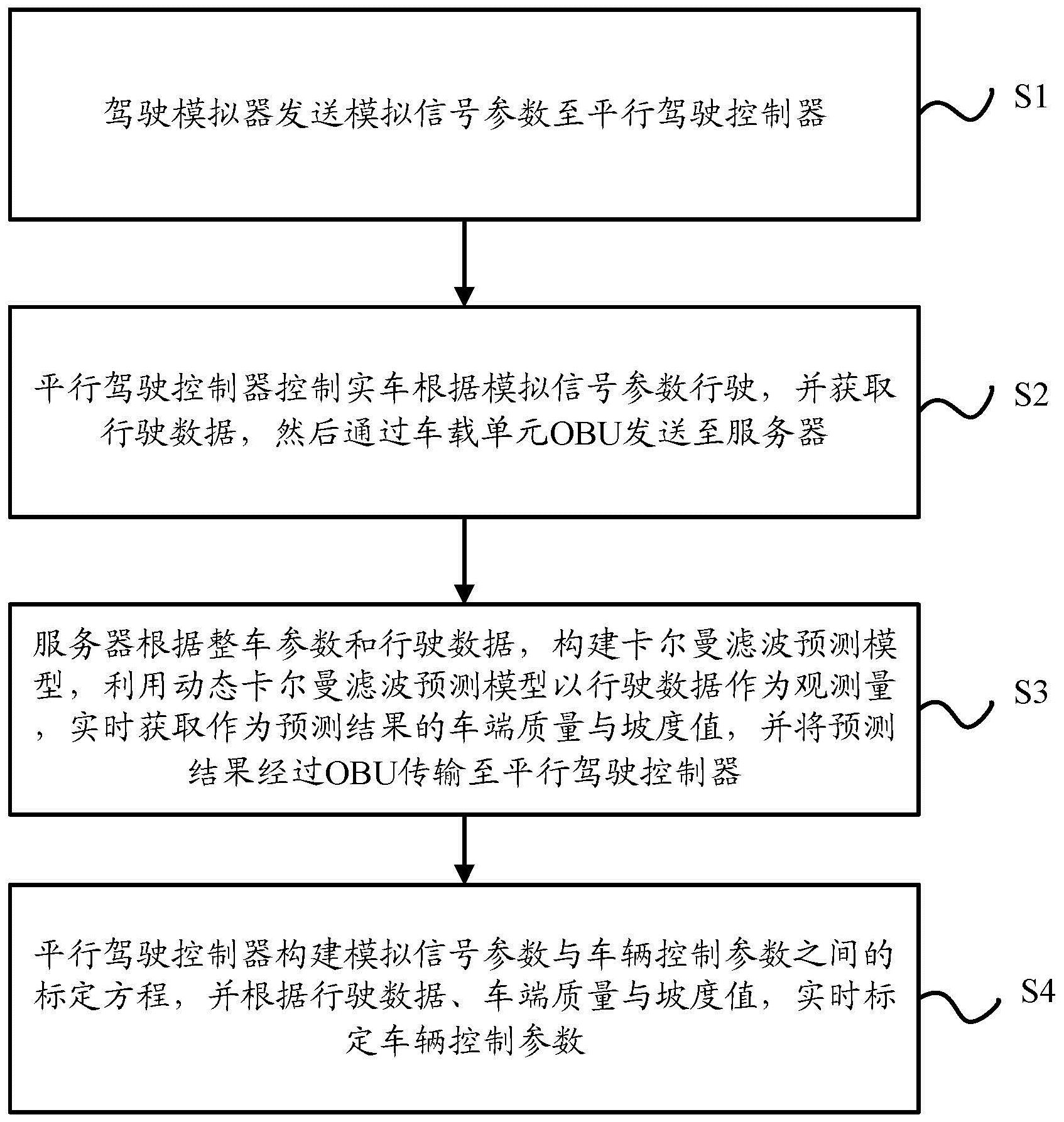
针对现有技术中存在的缺陷之一,本申请的目的在于提供一种平行驾驶车辆控制 参数自适应标定方法及系统以解决未考虑整车质量和行驶坡度对车辆控制参数影响的问 题。 本申请第一方面提供一种平行驾驶车辆控制参数自适应标定方法,其包括步骤: 驾驶模拟器发送模拟信号参数至平行驾驶控制器; 所述平行驾驶控制器控制实车根据所述模拟信号参数行驶,并获取行驶数据,然 后通过车载单元OBU发送至服务器; 所述服务器根据整车参数和所述行驶数据,构建卡尔曼滤波预测模型,利用卡尔 曼滤波预测模型以所述行驶数据作为观测量,实时获取作为预测结果的车端质量与坡度 值,并将预测结果经过所述OBU传输至平行驾驶控制器; 所述平行驾驶控制器构建所述模拟信号参数与车辆控制参数之间的标定方程,并 根据所述行驶数据、车端质量与坡度值,实时标定所述车辆控制参数。 一些实施例中,还包括:当所述车辆控制参数超出预设范围时,重新标定所述模拟 信号参数与车辆控制参数之间的映射关系。 一些实施例中,所述行驶数据包括行驶速度和加速度; 所述加速度通过采集得到或通过行驶速度微分计算得到。 一些实施例中,还包括: 5 CN 111580494 A 说 明 书 2/8 页 当所述实车达到停止条件时,停止预测,并以前一时刻得到车端质量与坡度值作 为终值。 一些实施例中,所述停止条件包括至少以下之一: 所述实车的制动压力大于制动压力阈值; 所述实车的变速箱处于换挡过程中,换挡标志位为真; 所述实车的当前车速小于车速阈值; 所述实车的发动机扭矩小于扭矩阈值; 在滤波后,所述实车的发动机扭矩变化率大于变化率阈值; 所述实车的当前档位为空档或倒挡。 一些实施例中,以所述行驶数据作为观测量,实时获取作为预测结果的车端质量 与坡度值,具体包括: 以汽车系统动力学方程为状态方程,将加速阻力假设为过程噪音, ∑F=Fair Fg Fμ G 其中,Fair为空气阻力,Fg为加速阻力,Fμ为滚动阻力,G为系统噪音,F为辆行驶驱动 力,Twheel为发动机扭矩,rwheel为车轮半径; 基于车辆纵向动力学模型转化成离散状态空间的形式,选取行驶速度、车端质量 的倒数以及滚阻系数的三角函数作为状态量,状态方程可以描述如下, 其中, 为k时刻的状态量估计值,μ为滚阻系数,β为坡度,Vk为行驶速度,m为车端 质量,βμ为滚阻系数的反切值, 为三个状态分量; 将所述状态方程离散化,得到一步预测方程如下, 其中,α1为风阻相关量,ρ为空气密度,Cd为空气动力学系数,Af为迎风面积,α2为滚 阻相关量,g为重力加速度, 为车辆速度的微分, 为在k时刻对k 1时刻的状态量预测 值,Ts为EKF运算时间步长; 建立卡尔曼滤波预测模型的观测方程如下, 6 CN 111580494 A 说 明 书 3/8 页 其中,Zk 1为k 1时刻的观测量(系统输入值),ak为加速度的测量值; 利用k时刻对k 1时刻的状态量预测值 和k 1时刻的观测量Zk 1,估算得到k 1 时刻的状态量估计值,得到实时的车端质量与坡度值。 一些实施例中,实时标定所述车辆控制参数之前,还包括: 将所述行驶数据中的行驶速度、车端质量与坡度值进行归一化处理,使其置于[0, 1]区间。 本申请第二方面提供一种平行驾驶车辆控制参数自适应标定系统,其包括: 驾驶模拟器,其用于发送模拟信号参数; 平行驾驶控制器,其用于控制实车根据所述模拟信号参数行驶,并获取行驶数据; 服务器,其用于根据整车参数和所述行驶数据,构建卡尔曼滤波预测模型,以及利 用动态卡尔曼滤波预测模型以所述行驶数据作为观测量,实时获取作为预测结果的车端质 量与坡度值; 所述平行驾驶控制器还用于构建所述模拟信号参数与车辆控制参数之间的标定 方程,并根据所述行驶数据、车端质量与坡度值,实时标定所述车辆控制参数。 一些实施例中,当所述车辆控制参数超出预设范围时,所述平行驾驶控制器还用 于重新标定所述模拟信号参数与车辆控制参数之间的映射关系。 一些实施例中,还包括: 车载单元OBU,其通过5G客户终端设备CPE与服务器进行通讯连接,所述OBU用于将 所述平行驾驶控制器获取的行驶数据发送至服务器,以及将服务器获取的预测结果发送至 平行驾驶控制器。 本申请提供的技术方案带来的有益效果包括: 本申请的平行驾驶车辆控制参数自适应标定方法及系统,由于平行驾驶控制器控 制实车根据模拟信号参数行驶,并获取行驶数据,以便于服务器根据整车参数和行驶数据, 实时获取车端质量与坡度值,供平行驾驶控制器进行实时标定,因此,可实现结合远程被控 车辆的质量和所处道路的坡度信息,实时标定车辆控制参数,以便于远程驾驶员安全、高效 地控车。 附图说明 图1为本申请实施例提供的平行驾驶车辆控制参数自适应标定方法的流程图; 图2为本申请实施例提供的车端质量和坡度值的计算流程图; 图3为本申请实施例提供的车辆纵向动力学模型的示意图; 图4为本申请实施例提供的平行驾驶车辆控制参数自适应标定系统的示意图。











