
技术摘要:
本发明提供了基于稀疏驱动ALE的支持向量机的水下目标检测方法及系统,所述方法包括:将水下无人平台的阵列接收数据进行波束形成;形成波束信号;对波束信号进行稀疏驱动ALE处理,得到增强后的波束域信号;将增强后的波束域信号通过离散傅里叶变换转化为波束声谱,计算 全部
背景技术:
随着减振降噪技术的发展,舰船辐射噪声水平大幅度降低,对于水下无人平台被 动检测低噪声、安静型水下目标带来更大挑战。水下目标包含的线谱一般具有较好的相位 稳定性以及更高强度,但弱目标的线谱受噪声连续谱方差的影响容易淹没在连续谱分量 中,需要滤除信号中的宽带干扰及背景噪声。 常规的自适应线谱增强器(Adaptive Line Enhancer,ALE)可以增强线谱信号并 抑制宽带噪声,但由于自适应滤波的稳态误差问题限制了其性能;基于自动阈值的能量检 测方法受非均匀噪声背景、强干扰等影响严重,弱目标检测能力难以满足水下无人平台要 求的环境自主适应性。
技术实现要素:
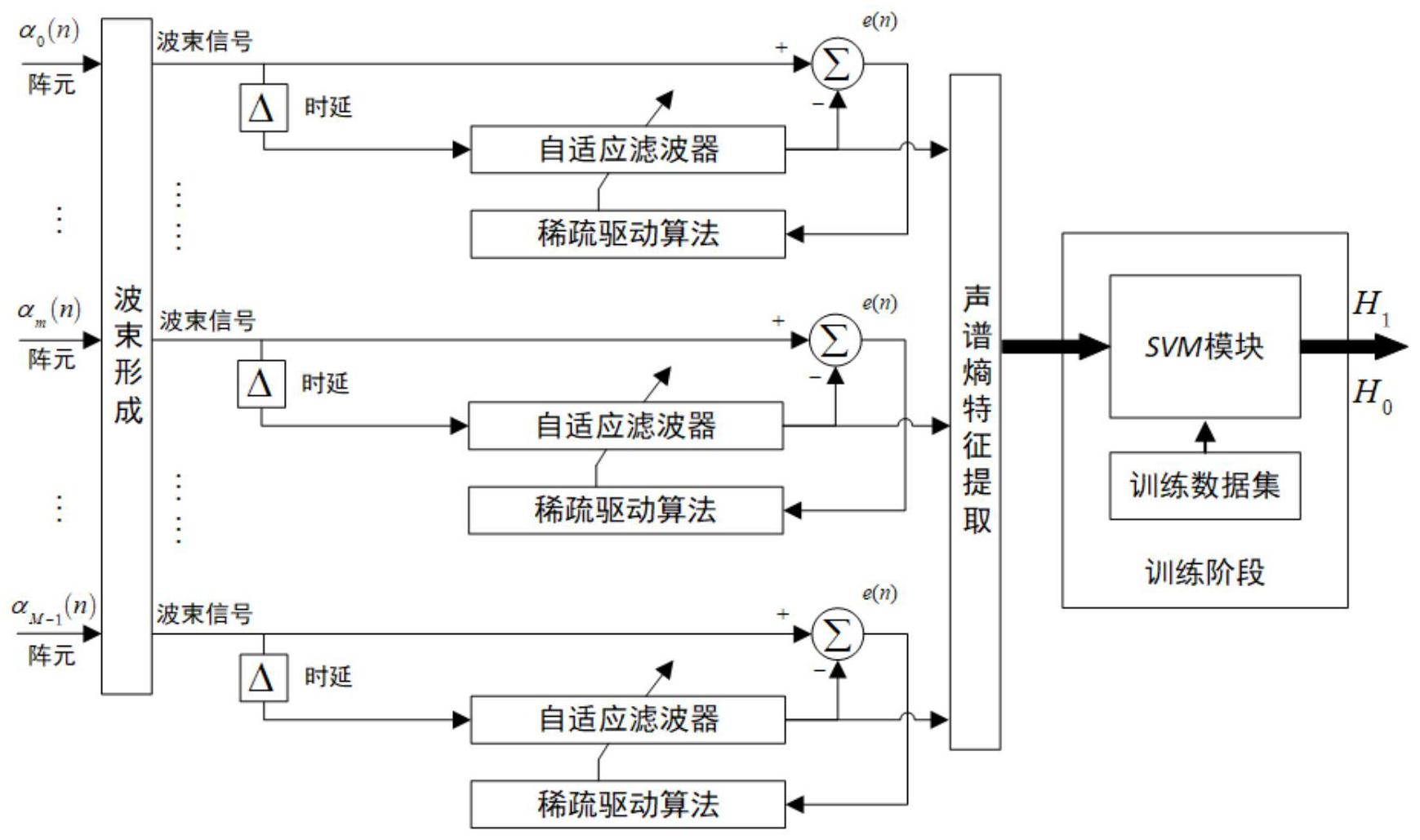
本发明的目的在于克服上述技术缺陷,提供基于稀疏驱动ALE的支持向量机的水 下目标检测方法,用以解决水下无人平台在非均匀噪声背景、宽带强干扰等复杂环境中对 弱目标检测能力的不足,提高对线谱弱目标的检测概率。 为实现上述目的,本发明的实施例1提供了基于稀疏驱动ALE的支持向量机的水下 目标检测方法,所述方法包括: 将水下无人平台的阵列接收数据进行波束形成;形成波束信号; 对波束信号进行稀疏驱动ALE处理,得到增强后的波束域信号; 将增强后的波束域信号通过离散傅里叶变换转化为波束声谱,计算波束声谱的熵 特性并绘制熵特性曲线;计算熵特性曲线的均值和标准差,构建二维熵特征; 将二维熵特征输入预先训练好的支持向量机,输出目标检测的判别结果。 作为上述方法的一种改进,所述对波束信号进行稀疏驱动ALE处理,得到增强后的 波束域信号,具体包括: 步骤S1)自适应滤波器的初始频域权值wF(0)表示为: wF(0)=[wF,0(0) ,wF,1(0) ,...,w TF,L-1(0)] 令n表示迭代次数,初值为0; 步骤S2)第n次迭代自适应滤波器的时域输出y(n)表示为: 其中,wF(n)=[wF,0(n) ,wF,1(n) ,...,w TF,L-1(n)] 为第n次迭代自适应滤波器的频域 权值;x(n-Δ)为时延后的波束信号: x(n-Δ)=[x(n-Δ),x(n-Δ-1),...,x(n-Δ-L 1)]T 其中,x(n)是参考信号,Δ为时延,L为滤波器阶数; 6 CN 111582026 A 说 明 书 2/9 页 步骤S3)计算第n次迭代自适应滤波器的输出估计误差e(n): e(n)=x(n)-y(n) 步骤S4)计算第n 1次自适应滤波器的频域权值wF(n 1): 根据梯度下降原理,通过l1/2范数正则化的稀疏驱动ALE处理,第n 1次迭代自适应 滤波器的频域权值wF(n 1)为: 其中, 表示向量的按位相乘运算,|·|-3/2表示对向量按位取模的-3/2次方,μ为 步长,ρ=μκ为常数,κ为常数;xF(n-Δ)为x(n-Δ)的离散傅里叶变换; 步骤S5)若||wF(n 1)-wF(n)||小于阈值,则进入步骤S6),否则,n加1后,转入步骤 S2); 步骤S6)计算经稀疏驱动ALE处理后,最终的增强后的波束域信号y(n 1): 其中,x(n 1-Δ)=[x(n 1-Δ),x(n-Δ),...,x(n-Δ-L 2)]T,xF(n 1-Δ)为x(n 1-Δ)的离散傅里叶变换。 作为上述方法的一种改进,所述将增强后的波束域信号通过离散傅里叶变换转化 为波束声谱,计算波束声谱的熵特性并绘制熵特性曲线,具体包括: 将增强后的波束域信号y(n 1)通过离散傅里叶变换转化为波束声谱; 设第m个时间窗的波束声谱包含N个频点,其幅值分别为c1 ,c2,…cN,则第n个频点 的权重pn为其幅值与该时间窗内全部频点幅值之和的比值: 根据其幅值权重,第m个时间窗的香农熵值Entropym为: Entropym为波束声谱的熵特性; 以时间窗m为横坐标,Entropym为纵坐标,绘制熵特性曲线。 作为上述方法的一种改进,所述计算熵特性曲线的均值和标准差,构建二维熵特 征,具体包括: 计算熵曲线的均值Eave及标准差Estd: 7 CN 111582026 A 说 明 书 3/9 页 其中,M为熵特性曲线中的熵值个数; 将熵曲线的均值Eave及标准差Estd组成二维特征向量,作为二维熵特征。 作为上述方法的一种改进,所述方法还包括:对支持向量机进行训练的步骤,具体 包括: 建立训练集,包括:水下无人平台的阵列接收数据和其标签; 对训练集的水下无人平台的阵列接收数据进行波束形成;形成波束信号;对波束 信号进行稀疏驱动ALE处理,得到增强后的波束域信号;将增强后的波束域信号通过离散傅 里叶变换转化为波束声谱,计算波束声谱的熵特性并绘制熵特性曲线;计算熵特性曲线的 均值和标准差,构成二维熵特征; 选取高斯核函数作为支持向量机的二分类器;其输出为0时,代表假设检验H0:不 存在目标;其输出为1时,代表假设检验H1:存在目标; 将训练集的二维熵特征输入支持向量机进行训练,并根据训练数据的特征分布优 化支持向量机的参数。 本发明的实施例2提供了基于稀疏驱动ALE的支持向量机的水下目标检测系统,其 特征在于,所述系统包括:水下无人平台、训练好的用于目标检测的支持向量机、波束形成 模块、稀疏驱动ALE处理模块、二维熵特征构建模块和目标检测模块; 所述波束形成模块,用于将水下无人平台的阵列接收数据进行波束形成;形成波 束信号; 所述稀疏驱动ALE处理模块,用于对波束信号进行稀疏驱动ALE处理,得到增强后 的波束域信号; 所述二维熵特征构建模块,用于将增强后的波束域信号通过离散傅里叶变换转化 为波束声谱,计算波束声谱的熵特性并绘制熵特性曲线;计算熵特性曲线的均值和标准差, 构建二维熵特征; 所述目标检测模块,用于将二维熵特征输入预先训练好的支持向量机,输出目标 检测的判别结果。 作为上述系统的一种改进,所述稀疏驱动ALE处理模块的具体实现过程为: 步骤S1)自适应滤波器的初始频域权值wF(0)表示为: wF(0)=[wF,0(0) ,wF,1(0) ,...,wF,L-1(0)]T 令n表示迭代次数,初值为0; 步骤S2)第n次迭代自适应滤波器的时域输出y(n)表示为: 其中,wF(n)=[wF,0(n),wF,1(n),...,w (n)]TF,L-1 为第n次迭代自适应滤波器的频域 权值;x(n-Δ)为时延后的波束信号: x(n-Δ)=[x(n-Δ),x(n-Δ-1) ,...,x(n-Δ-L 1)]T 其中,x(n)是参考信号,Δ为时延,L为滤波器阶数; 步骤S3)计算第n次迭代自适应滤波器的输出估计误差e(n): e(n)=x(n)-y(n) 步骤S4)计算第n 1次自适应滤波器的频域权值wF(n 1): 根据梯度下降原理,通过l1/2范数正则化的稀疏驱动ALE处理,第n 1次迭代自适应 8 CN 111582026 A 说 明 书 4/9 页 滤波器的频域权值wF(n 1)为: 其中,表示向量的按位相乘运算,|·|-3/2表示对向量按位取模的-3/2次方,μ为 步长,ρ=μκ为常数,κ为常数;xF(n-Δ)为x(n-Δ)的离散傅里叶变换; 步骤S5)若||wF(n 1)-wF(n)||小于阈值,则进入步骤S6),否则,n加1后,转入步骤 S2); 步骤S6)计算经稀疏驱动ALE处理后,最终的增强后的波束域信号y(n 1): 其中,x(n 1-Δ)=[x(n 1-Δ),x(n-Δ),...,x(n-Δ-L 2)]T,xF(n 1-Δ)为x(n 1-Δ)的离散傅里叶变换。 作为上述系统的一种改进,所述二维熵特征构建模块的具体实现过程为: 将增强后的波束域信号y(n 1)通过离散傅里叶变换转化为波束声谱; 设第m个时间窗的波束声谱包含N个频点,其幅值分别为c1 ,c2,…cN,则第n个频点 的权重pn为其幅值与该时间窗内全部频点幅值之和的比值: 根据其幅值权重,第m个时间窗的香农熵值Entropym为: Entropym为波束声谱的熵特性; 以时间窗m为横坐标,Entropym为纵坐标,绘制熵特性曲线; 计算熵曲线的均值Eave及标准差Estd: 其中,M为熵特性曲线中的熵值个数; 将熵曲线的均值Eave及标准差Estd组成二维特征向量,作为二维熵特征。 本发明的优势在于: 通过本发明所提供的水下目标检测方法,降低了ALE的稳态误差,提高了稀疏驱动 ALE的线谱输出信噪比,提高了对线谱弱目标的检测概率,在非均匀噪声背景、宽带强干扰 下提升了水下无人平台进行目标检测的环境适应性。 9 CN 111582026 A 说 明 书 5/9 页 附图说明 图1是本发明的基于稀疏驱动ALE的支持向量机的水下目标检测方法的流程图; 图2是本发明的稀疏驱动ALE处理的流程图; 图3是仿真常规ALE与稀疏驱动ALE的稳态误差对比; 图4是仿真常规ALE加权向量与最优维纳权值的幅频特性对比; 图5是仿真稀疏驱动ALE加权向量与最优维纳权值的幅频特性对比; 图6是仿真常规ALE输出LOFAR图; 图7是仿真稀疏驱动ALE输出LOFAR图; 图8是本发明的海上试验数据训练与测试结果示意图。











