
技术摘要:
本公开实施例涉及控制装置。公开了用于从控制装置向要被控制的设备传送指令数据项的方法和装置。控制装置从设备接收针对至少一个指令数据项的请求,并且通过发送响应消息来响应该请求。该响应包括至少部分地基于对所请求的至少一个数据项先前是否已经被发送的确定,来 全部
背景技术:
设备可以通过经由通信链接发送控制指令而被远程控制。远程控制的一个示例是 通过单独的控制装置对无人设备的控制。无人设备可以被定义为不在人类操作者的直接控 制下的设备。无人设备的一个示例是无人载具,诸如飞行载具(例如,无人飞行器(UAV))、陆 上交通工具和水运工具。陆地交通工具的非限制性示例包括移动载具,诸如汽车(例如,无 人驾驶车辆、货车、重型货车、摩托车等)、工业自动引导载具、农业、林业、园艺、清洁、清理、 以及监视和/或本地控制设备等。无人设备的另外的非限制性示例包括诸如机器人、机械臂 的机器以及其他可以在没有人类操作者存在的情况下操作的机器。设备的其他示例包括可 以至少部分地基于经由数据通信链路从控制装置传达的指令而至少被控制的设备。 载具或其他设备可以被配置为接收与其将要执行的作业(task)有关的控制指令。 在本公开中,术语“任务”(mission)用于将要由设备执行的任何作业或操作,或者作业或操 作的一部分。设备可以基于从控制装置接收到的控制指令来自主地或半自主地操作。在任 务期间,控制指令可能需要不断地被提供给设备,以使得其能够以所期望的方式操作并且 完成任务。可能需要持续递送控制指令,例如,来控制移动设备的运动、响应于操作条件和/ 或计划的变化等。控制指令可以例如经由适当的数据通信系统被不断地提供给无人设备。 数据可以通过无线链路而被传达。 设备可以用来执行各种不同的作业或任务。例如,无人载具可以被部署成:从多个 不同区域采集数据以用于搜索操作,递送和/或采集对象,随着它们的移动和/或它们的周 围采集/流传输图像和视频数据,执行维护操作等。设备可以被配置为使用实时或近乎实时 的传感器数据来实现由针对作业的指令所指定的一组目标。传感器数据可以从位于无人设 备上的传感器、或从外部装置被接收。任务可以由单独的无人载具或其他设备来执行,或者 可以由为实现共同目标/任务而动作的一系列无人设备来执行。执行任务可变为复杂的作 业,并且可能包括控制装置与无人设备之间的大量数据和消息的传送。这可能导致时延和/ 或开销问题。
技术实现要素:
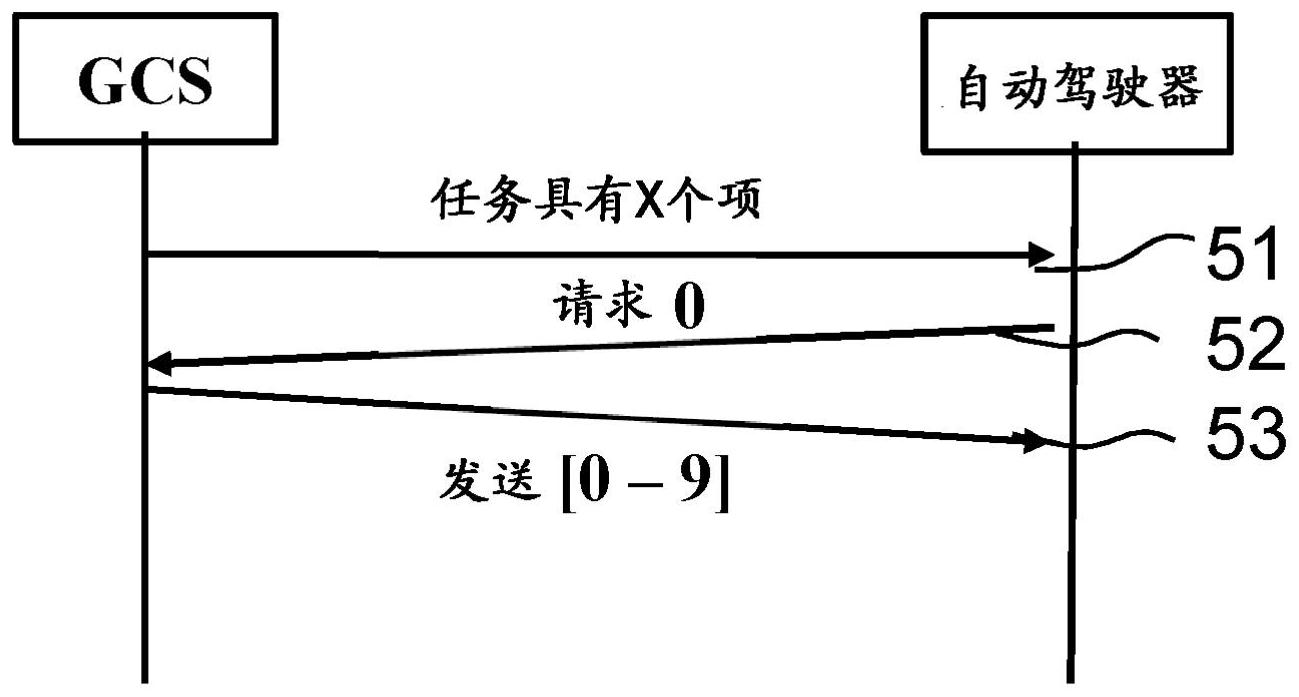
根据一个方面,提供了一种用于从控制装置传送指令数据项的方法,包括:由控制 装置从设备接收针对至少一个指令数据项的请求,以及由控制装置通过发送响应消息来响 应请求,该响应包括至少部分地基于对所请求的至少一个数据项先前是否已经被发送的确 定,在响应消息中选择性地包括至少一个指令数据项。 根据另一方面,提供了一种控制装置,该控制装置被配置为从设备接收针对至少 一个指令数据项的请求;以及发送对该请求的响应消息,该发送包括:至少部分地基于对所 5 CN 111552279 A 说 明 书 2/15 页 请求的至少一个数据项先前是否已经被发送的确定,在响应消息中选择性地包括至少一个 指令数据项。 根据一方面,提供了一种用于在设备处获取指令数据项的方法,该方法包括:从设 备向控制装置发送针对至少一个指令数据项的请求,由该设备从控制装置接收对该请求的 响应消息,所述响应信息包括一个或多个指令数据项,其中指令数据项的数目至少部分地 基于对所请求的至少一个数据项先前是否已经被发送到设备而已经被选择,以及基于响应 消息中接收到的一个或多个指令数据项,控制该设备的操作。 根据一个方面,提供了一种用于设备的控制装置,被配置为:向远程控制装置发送 针对至少一个指令数据项的请求;从该远程控制装置接收包括一个或多个指令数据项的响 应消息,其中指令数据项的数目至少部分地基于对所请求的至少一个数据项先前是否已经 被发送到设备的确定而已经被选择;以及基于响应消息中接收到的一个或多个指令数据 项,控制设备的操作。 根据更详细的方面,该控制装置可以响应于针对单个指令数据项的请求,选择性 地在响应消息中包括单个指令数据项或多个指令数据项。 根据另一更详细的方面,该控制装置可以动态地调整响应消息中的指令数据项的 数目。 根据另一更详细的方面,该控制装置可以在响应消息中包括该请求所没有请求的 至少一个指令数据项。 根据另一更详细的方面,控制装置可以通过在响应消息中包括多个指令数据项来 响应该请求。被包括在该响应消息中的指令数据项的数目可以大于该请求所指示的数据项 的数目。 根据另一更详细的方面,控制装置可以响应于确定请求涉及已经被发送到设备的 指令数据项,在响应消息中包括单个指令数据项。响应于确定该请求涉及尚未被发送到设 备的指令数据项,多个指令数据项可以被包括在响应消息中。 该响应消息可以包括该请求所没有请求的至少一个指令数据项。 根据一方面,从控制装置被传送给设备的第一响应消息包括多个指令数据项。接 收到的多个指令数据项中的一个指令数据项被用于设备的控制,并且多个指令数据项中的 其他指令数据项被保存在设备的存储器中。响应于从存储器获取所保存的指令数据项中的 一个指令数据项的失败,针对未被获取的指令数据项的第二请求被发送。作为响应,包括至 少一个指令数据项的第二响应消息被接收,该至少一个指令数据项与第二请求所请求的指 令数据项不同。设备的操作然后可以基于接收到的至少一个指令数据项而被继续。 该设备可以包括无人飞行器。该设备可以包括无人陆上交通工具。该设备可以包 括无人水运工具。该设备可以包括无人控制装置。该设备可以包括无人机器。该设备可以包 括在物联网环境中被操作的设备。 该控制装置和该设备可以被配置为基于Mavlink协议来处理请求和响应。用户数 据报协议可以用于消息。 该控制装置可以被配置为确定如何响应来自设备的、针对至少一个指令数据项的 请求。该控制装置可以决定以携带一个任务数据项的消息、或携带多个任务数据项的消息 来选择性地响应。该控制装置还可以确定多少数据项将被包括在响应消息中。 6 CN 111552279 A 说 明 书 3/15 页 可以做出对所请求的指令数据项中的一个或多个指令数据项是否已经被递送的 确定。如果该项尚未被发送,则该信息可被视为意味着请求被做出,因为受控设备处的缓冲 器是空的。控制装置可以发送携带接下来的多个数据项的响应消息。还可以确定的是,所请 求的项已经被发送到设备。然后可以做出该设备处的缓冲器很可能不为空的确定。这样的 确定可以基于以下假设来做出:由于对数据项的先前发送,因此缓冲器中还剩下一些项。为 了避免缓冲器溢出的风险,具有一个指令数据项、或具有少数项的响应消息被发送。 可以提供用于控制无人设备的控制站。该控制站可以包括如本文所描述的控制装 置。控制站可以包括地面控制站。控制站可以包括移动通信设备。 还可以提供一种用于控制无人设备的系统,该系统包括如本文所描述的控制装置 和/或控制站。 还可以提供体现本文所描述的功能的至少一部分的计算机软件产品。 附图说明 现在将仅通过示例的方式,参考以下示例和附图来更详细地描述一些方面,其中: 图1图示了控制装置以及由该控制装置控制的无人设备的一个示例; 图2示出了用于无人设备的控制装置的一个示例; 图3和图4是根据一些示例的远程控制装置的操作的流程图; 图5是响应消息的一个示例; 图6和图7是根据一些示例的在无人设备处的操作的流程图; 图8是一个示例的信令流程图; 图9是根据一个示例的由控制装置执行的动作的流程图; 图10是针对图9的示例的信令流程图; 图11是针对另一示例的信令流程图;以及 图12示出了另外的示例。











