
技术摘要:
本发明涉及一种多功能搓澡机,包括升降机构,该机构包括机架、升降构件;驱动装置,与该升降机构连接;多功能搓澡头和与该头连接的作业头电机;该升降机构有且仅有一套;该升降机构具有自锁性或/和所述驱动装置为正反转驱动装置并装设有与该正反转互锁的脉冲式正反转控 全部
背景技术:
[中国实用新型]专利号:CN201220385008.0专利名称《:遥控自动洗澡机》提供了 一种洗澡机,该专利采用不具有自锁性的齿条--齿轮升降机构,该升降构件在作业时只具 有“上升”或“下降”两种运动状态,不上则下,不下则上,洗澡过程差强人意。[中国实用新 型]专利号:CN201721377164 .1专利名称:《洗澡机》虽然采用了丝杆-螺母升降机构,但丝 杆-螺母副仍不一定能保证其具有良好的宜人性。
技术实现要素:
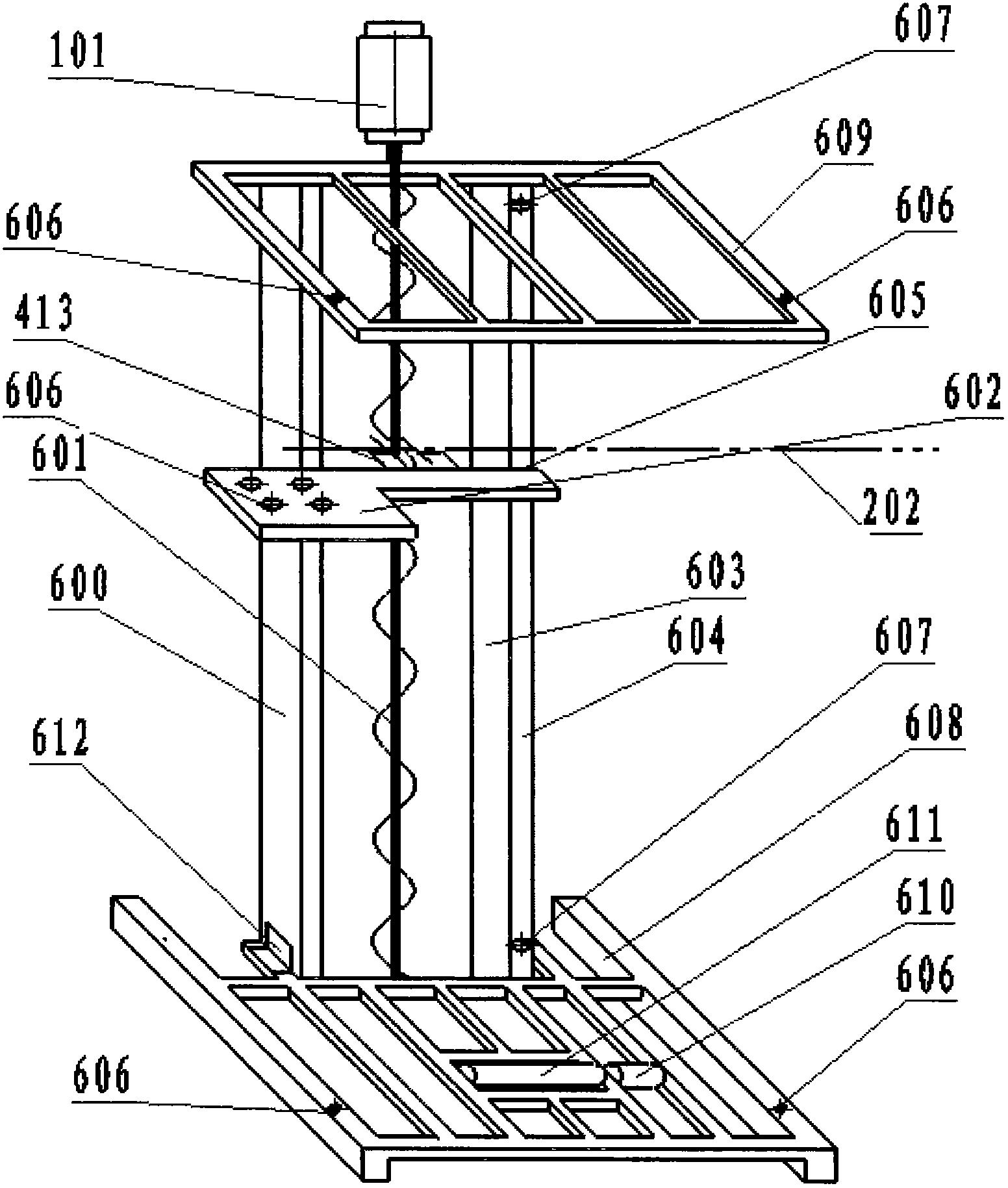
本发明的目的是:提供一种结构简约,宜人性好的立式洗浴或/和健身设备。 本发明采用下述技术方案来实现: 一种多功能搓澡机,包括 升降机构,所述机构包括机架、升降构件; 驱动装置,与所述升降机构连接; 多功能搓澡作业头总成,所述总成包括多功能搓澡作业头和与所述作业头连接的 作业头电机; 所述升降机构有且仅有一套; 所述升降机构具有自锁性、刹车装置或所述驱动装置为正反转驱动装置并装设有 与所述正反转互锁的脉冲式正反转控制装置; 所述作业头电机直接或通过支架与所述升降构件连接,使多功能搓澡作业头总成 的支撑结构为悬臂支撑或近似单点支撑。 所述多功能搓澡机包括搓澡、按摩或拍打等功能。 所述驱动装置又称为原动机。 所述具有自锁性的升降机构除后述的之外还包括: A.分度圆导程角小于当量摩擦角的蜗杆-蜗轮升降机构; B.各种升降机构 锥角小于当量摩擦角的圆锥滑动轴承副构成的复合机构等。 所述刹车装置,譬如安装在滑轮组的主动滑轮轮毂两侧或轮毂内侧的连杆刹车片 装置或电磁离合刹车片装置,或采用吊车吊钩的停顿控制装置。 脉冲式正反转控制装置通过对正反转电路反复地机械切换、电子切换或微电脑I/ O的切换等,使驱动装置产生等角位移或等转数的正反转运动,升降构件在任意指定的高度 产生上下震荡,形成近似“停顿”状态。 正反转运动与脉冲式正反转运动两种互锁状态通过按钮或声控等方式切换。 所述最佳技术方案是在自锁的基础上添加脉冲式正反转控制装置,且脉冲峰值可 调。 4 CN 111588294 A 说 明 书 2/10 页 升降机构具有自锁性、刹车装置或驱动装置具有脉冲式正反转控制装置的多功能 搓澡机具有以下优点: A.升降机构的自锁性使升降构件不仅具有“升”、“降”,还具有“停顿”运动状态,增 加了所述机构运行的柔性。 B.不论作业头在上升或下降途中,人、声控或人工智能可随时控停升降驱动装置 的运行,作业头随之停留、停顿在瞬间对应的高度位置,不产生下滑现象,方便地实现对人 体的特定部位(如:人体四肢的分叉处)或重点部位(如:人体重点穴位处的反复按摩,人体 较脏部位的反复搓洗)持续、重复作业,不需要频繁地操控“升”、“降”。 C.操控简便,宜人性好。多功能搓澡过程是人体大脑和肢体放松的过程,尤其对于 大脑反应较慢、肢体动作迟缓的老弱人群,升降机构如果不能停顿,要对自身的特定部位或 重点部位持续、重复作业,就得频繁操控升降驱动装置,累心、累脑、累肢体。升降机构有“停 顿”运动状态,即使多功能搓澡没停留在某个准确的高度位置,人体可轻松地通过踮脚、弯 曲膝关节或点动升降驱动装置来找准作业部位。 D.安全性好。可有效防止升降部件(包括作业头)在重力和惯性力的作用下损伤限 位装置、升降部件本身或脚踏板等。 近似单点支撑是指在机构运动简图上可视为单点支撑,区别于大跨度的两点双支 撑。 所述悬臂支撑或近似单点支撑均指在铅垂平面而非水平平面而言。 作业头总成采用悬臂支撑或近似单点支撑相对两点支撑有以下优点: A.两点支撑需要两套升降机构 两个驱动装置 两套轴承 两套轴承座,虽然两套 升降机构或可以共用一机架,但连接结构相对复杂,制作成本几乎成倍增加。悬臂支撑或近 似单点支撑只需要一套升降机构和一个驱动装置,结构简约、成本低廉。 B.作业头总成的重心实际靠近作业头电机(尤其是加装了齿轮减速箱的电机),作 业部位于辊身的作业头虽然力臂长,但相对于作业头电机重量并不大,且作业力和作业力 矩也不需要太大,悬臂支撑或近似单点支撑足以胜任。 C.悬臂支撑或近似单点支撑的重点是作业部位于辊身或头部的作业头与作业头 电机之间的连接部的强度问题,而非作业头总成的变形问题,变形对作业没任何影响,对 此,只需保证该连接部强度即可。 优选地,所述多功能搓澡作业头包括: 横置的转轴,与所述作业头电机连接; 柔性体作业部,直接或是通过径向支撑与所述转轴轴身沿轴向的至少两处连接; 柔性体作业部部身呈悬置状分布在所述转轴轴身外周或外侧。 所述悬置状指柔性体作业部的部身空悬在横置的转轴轴身外周或外侧,除连接处 外作业部的部身与转轴轴身呈分离状态。 所述柔性体作业部的形状包括筒状、带状或绳状作业部等。筒状是空悬在所述转 轴外周的闭合曲面;绳状是宽度尺寸与厚度尺寸近视相等;带状是宽度尺寸大于厚度尺寸 且宽度介于筒状与绳状之间。 柔性体包括弹性体,柔性材料包括弹性材料。 柔性体材料包括各种橡胶、合成树脂、纤维织物、动物皮、柔性金属结构体等。 5 CN 111588294 A 说 明 书 3/10 页 作为柔性体作业部的柔性体材料优先采用可作为捆绑带的橡胶、乳胶、硅胶或丁 基胶等材料或尼龙、 PV塑料或PU塑料等柔性材料。 所述柔性体作业部可以是网状、波纹管等。 柔性体作业部表层可分布有刷毛、凸点、凸齿、凸条、凸花纹图案或孔群,或是柔性 体作业部表面有增大摩擦力的覆盖层或缠绕层。 网状包括编织网、压制成型网或注射成型网。所述网包括金属网、树脂网、橡胶网、 植物纤维网。凸齿、凸点、凸条、凸花纹为柔性、弹性、硬质或半硬质。凸点、凸齿、凸条包括气 泡、液泡及连接到柔性体作业部表面或表层的半圆头螺钉或金属球头件等。增大摩擦力的 覆盖层或缠绕层为毛巾、编织网条、布条橡胶带等。所述缠绕层是带状以螺旋线方式缠绕在 柔性体作业部表面。 作为绳状柔性体的柔性管、麻绳、圆柱弹簧、链条、传动链条、软轴、皮带、传动皮带 等直接或通过缠绕层、覆盖层或外套层与人体接触。 分布在转轴轴身外周或外侧的绳状或带状的柔性体作业部可以有数条。不同功能 的绳状、带状的柔性体作业部可以组合在同一转轴上。 所述径向支撑包括轴套、支撑轮、支撑盘、支撑杆或支撑管。 优点: 1 .以包括筒状、带状或绳状等构成的柔性体作业部,对人体曲线贴合的变形阻力 小、力学模型简单、作业力均匀,其对人体曲线的拟合性与拟合精度远远优于实体辊。 2.柔性体作业部的取材广泛、灵活、方便。 3.多功能搓澡作业头结构简约、制造容易、成本低廉。 优选地,所述柔性体作业部的轴向长度大于所述连接处之间的距离。 柔性体作业部的轴向长度大于所述连接处之间的距离,一则可增加对人体的包络 范围;二则以产生作业所需的离心运动和离心力。 为了产生足够的离心力,柔性体作业部可采用重质柔性结构或重质材料。 重质柔性结构包括:连接重质柔性结构的材料、采用内装液体的柔性管体结构、采 用内装增重物料并有阻止增重物料跨段移动的若干分段界隔的柔性管体结构、采用内装增 重物料并有阻止增重物料跨区移动的若干分区界隔的柔性双层结构等。 所述增重物料包括球体、碎石、液体或固液混合体等。 柔性体作业部也可采用在绳上穿按摩球、在绳上栓螺母或在离所述连接处一定距 离装设重锤等。 为防止在离心力作用下,柔性体作业部的离心运动半径太大,可以在柔性体作业 部与转轴之间拴限位拉线或绳状柔性体作业部与筒状柔性体作业部组合并连接。 所述作业头电机至少有在作业区由下往上的旋向,以便对人体分肢处的作业。 采用离心运动作业的优点是: 1.当作业部局部的离心力>其局部或需弯折处的弯曲抗力时,柔性作业部可只需 两个支撑或沿转轴轴向只需两处连接,作业部在离心运动的作用下形成轴向外突,对人体 正面或背面进行搓洗的同时实现对外侧部位或内侧部位的搓洗,简化了作业头的结构; 2.减少来回搓洗次数,提高作业效率; 3.增重物料为钢球或大颗粒碎石时,可产生强按摩效果; 6 CN 111588294 A 说 明 书 4/10 页 4.采用内装增重物料的管体结构或双层结构,对人体同时产生拍打、按摩和搓洗 三种作用,有利于放松肌肤、疏通血脉、按摩穴位,有明显的保健作用; 5.作业力大小的调节方便,除了改变作业头电机转速外,还可通过改变人体与转 轴的距离来调节。 优选地,所述径向支撑之间有调整轴向距离的结构或装置或/和有更改所述柔性 体作业部在两径向支撑之间长度的调节结构。 柔性体作业部也可在人体挤压力作用下产生作业所需的张力。当作业部局部的离 心力<其局部或需弯折处的弯曲抗力时或所述柔性体作业部采用张力作业时,需要径向支 撑。 所述径向支撑之间调距的目的是便于适应人体内外侧间的距离。该调距的结构或 装置包括: A、一支撑与转轴固结,另一支撑空套在转轴上;或一支撑与转轴构成滑移副,另一 支撑与转轴构成转动副;其中一支撑及与之连接的柔性体作业部的连接端由转轴直接驱动 旋转,另一支撑由柔性体作业部的另一端带动产生滞后旋转,在滞后的时间段内,柔性体作 业部产生扭曲现象,缩短柔性体作业部两端的距离,从而使空套的支撑或滑移副的支撑与 另一支撑的距离缩短,使两支撑紧靠人体相关部位。当人体离开柔性体作业部时,柔性体作 业部在离心运动的作用下,消除扭曲现象;当人体靠紧柔性体作业部时可重新规定两支撑 之间调整轴向距离;该原理也可推广应用到多支撑结构中; B、一端支撑与转轴固结,另一端支撑与转轴构成滑移副连接;一端支撑与圆环连 接,该圆环另一端串接有至少两个圆环,另一端支撑与弹性拉绳连接,该弹性拉绳另一端有 与圆环连接的挂钩,该挂钩挂在与支撑不同距离的圆环上,可规定两端支撑弹性距离,使支 撑在弹性力的作用下紧靠人体相关部位;位于中间的支撑与转轴或基础件之间采用滑移副 连接,中间的支撑之间也可采用该结构,中间的支撑与相邻的端支撑之间可加装压缩弹簧; C、支撑A与转轴固结,支撑B与转轴构成滑移副;在转轴上紧靠支撑B安装一压缩弹 簧,该弹簧的另一端安装一与转轴构成螺旋副的螺母,该螺母与转轴作相对运动,通过压缩 弹簧推移支撑B,改变两支撑(A、B)之间的轴向距离,使两支撑紧靠人体相关部位;或 D、转轴为管状,所述转轴的一端B内安装液压缸,由B端向中部方向有轴向通槽;支 撑A与转轴固结,支撑B通过一螺栓穿过所述轴向通槽与转轴构成滑移副连接;液压缸端部 紧靠所述螺栓侧面,活塞杆有供自来水流入活塞与液压缸内腔之间的轴向通孔,活塞杆与 转轴B端固结;进水管一端与活塞杆可进行转动副连接(比如,采用洗衣机进水管与水龙头 的连接头),另一端与自来水龙头连接,当打开水龙头,自来水进入液压缸内,推动液压缸、 螺栓及支撑B向支撑A方向移动;进水管管路上连接有低压溢流阀(直动式溢流阀),当两支 撑作用于人体的接触力达到一定值,溢流阀开启,并保持该接触力不变;调整或改变溢流阀 弹簧力,可调整两支撑作用于人体的接触力的大小。 更改柔性体作业部在两径向支撑之间长度的调节结构,以适应人体骨骼大小或胖 瘦尺寸不同的人群。所述调节结构包括: A、增加一支撑,在端部支撑与中间支撑之间,设置一包络柔性体作业部的径向绑 带,缩放绑带的长度,改变柔性体作业部在该包络点的径向尺寸,调节柔性体作业部工作长 度;中间支撑的外沿附近可以有供带状或绳状作业部通过或移动的轴向过孔、轴向过缝或 7 CN 111588294 A 说 明 书 5/10 页 轴向凹槽;或运动结构的中间支撑采用外沿有环形槽的支撑轮,可采用绑带在该环形槽将 柔性体作业部松套,提供柔性体作业部在环形槽内沿轴向滑移的通道; B、沿转轴轴向或基础件横向设置几个插孔,端部的支撑通过插销与插孔连接,插 销选择不同位置的插孔,调节柔性体作业部工作长度;中间支撑的外沿附近可以有供带状 或绳状作业部通过或移动的轴向过孔、轴向过缝或轴向凹槽;或运动结构的中间支撑采用 外沿有环形槽的支撑轮,可采用绑带在该环形槽将柔性体作业部松套,提供柔性体作业部 在环形槽内沿轴向滑移的通道;或 C、端部支撑与转轴之间采用滑移副连接,端部支撑的内侧设置一装设在转轴上并 与之构成螺旋副的螺母,转动螺母推动端部的支撑移动,调节柔性体作业部工作长度;中间 支撑的外沿附近可以有供带状或绳状作业部通过或移动的轴向过孔、轴向过缝或轴向凹 槽;或运动结构的中间支撑采用外沿有环形槽的支撑轮,可采用绑带在该环形槽将柔性体 作业部松套,提供柔性体作业部在环形槽内沿轴向滑移的通道。 优选地,所述升降机构为螺纹升角λ小于等于当量摩擦角ρυ的升降螺母与立式螺 杆构成的螺旋机构; 所述驱动装置由所述机架支撑,所述立式螺杆上端与所述驱动装置的输出轴连 接,螺杆下端采用无支撑或采用轴向浮动的支撑; 所述驱动装置采用具有正反转特性电机作为升降电机并和作业头电机均采用转 速≤888转/分或/和调速电机。 所述升降机构为螺纹升角λ小于等于当量摩擦角ρυ的螺母与立式螺杆构成的螺旋 机构,即λ≤ρυ,ρυ=arctg(f/cosβ)。式中:f——螺旋副摩擦系数,β——牙形斜角;螺旋机 构满足上式条件,即具有自锁性。 为了简化结构,改善力学状态,可采用彼此有一定距离的双螺母替代单螺母,双螺 母之间采用减震性好的木材、胶木或尼龙等材料连接。 作业头的重力和作业力对螺杆构成偏置力矩,螺杆的所述连接与支撑结构使螺杆 改常用的压杆为拉杆,避免了压杆稳定性问题的顾虑;同时可在保证螺杆及螺母强度的前 提下减小螺杆的直径;还简化了连接与支撑结构;改常用的压杆为拉杆,改变了力传递链, 压杆的力传递链是封闭链,链中任一构件的变形都会导致其它构件的变形或损坏;拉杆的 力传递链是开式链,受拉的螺杆的变形不会对链内其它构件任何影响。 所述升降电机的最佳转速或调速范围为28转/分~188转/分,功率为38瓦~88瓦; 所述作业头电机的最佳转速或调速范围为48转/分~428转/分,功率为48瓦~268瓦。 所述电机优先采用机械减速 调速电机。机械减速可采用齿轮减速箱。机械减速具 有小功率、小体积、大转矩的优点;调速可调整离心力及作业力的大小及离心运动的速度或 升降速度。调速包括微电脑调速、可控硅无级调速、电阻无级调速、分档调速等。 所述导轨为立柱或机壳其一侧壁的通孔导轨槽; 所述壳体为机架,当机壳内有导轨时,所述侧壁上的通孔导轨槽可以仅是供转轴 升降通过的通孔长槽。 优选地,所述升降机构由液压缸与活塞配合构成,所述活塞为升降构件并采用至 少两层嵌套的下端开口的管状活塞; 液压缸与活塞之间活塞与活塞之间有密封圈和限程止口; 8 CN 111588294 A 说 明 书 6/10 页 所述驱动装置由泵与具有保压位的电磁换向阀或液体方向控制回路与液压缸连 接构成; 所述作业头电机采用转速≤888转/分或/和调速电机。 所述泵优选封液性好的齿轮泵,当泵暂停工作且两位四通电磁换向阀处于保压位 时,所述活塞处于停顿(自锁)状态。 电磁换向阀采用具有保压位的两位四通、三位四通、三位五通电磁换向阀等;方向 控制回路采用换向回路或锁紧回路。 所述导轨为立柱、机壳其一侧壁的通孔导轨槽或液压缸与活塞之间采用销头与轴 向槽配合构成的导轨副。 所述壳体或/和液压缸为机架,当机壳内有导轨时,所述侧壁上的通孔导轨槽可以 仅是供转轴升降通过的通孔长槽。 所述作业头电机的最佳转速或调速范围为48转/分~428转/分,功率为48瓦~268 瓦。所述电机优先采用机械减速 调速电机。 优选地,所述机架上安装有规定所述升降构件上、下行程止点的限位装置。 限位装置包括机械式行程开关、光电探测装置等。升降构件触碰到限位开关或光 电探测装置探测到升降构件时即停止原有运动。限位装置也是安装在多功能搓澡机上的各 种设施启、停的发讯或切变点。 优选地,所述机架设置有贴地支撑架、脚踏板或洗浴健身房地基;在所述脚踏板或 所述地基上设置有与机械减速电机连接的脚底搓洗或/和按摩或/和拍打辊。 脚底搓洗或/和按摩或/和拍打辊的辊面开设有齿状、凸带状或缠绕有网状条等。 脚底按摩或搓洗辊既可对足底众多穴位进行按摩、健身,又可去除足底老皮。尤其当足底皮 层泡软后,可获得较好的去老皮的效果。 优选地,该机至少还包括下述结构之一: A.所述支撑架或脚踏板上装设有“开”字形构件或与增压泵连接的花洒; B.所述电机设置有绝缘支撑或所述电机的输出轴连接有绝缘过渡头; C.所述机架上装设有测量转轴速度的转速表或频率计; D.所述作业头或柔性作业部采用可拆装结构。 该“开”字形构件两竖为立杆,中间一横为防跌倒护腰杆,上面一横为浴霸安装条。 人体位于多功能搓澡作业头与防跌倒护腰杆之间。 转速表或频率计是防止搓澡作业部对人体拍打或按摩的频率与心脏的跳动频率 成倍数关系而引发心跳的共振危及人身安全。 绝缘过渡头或绝缘支撑采用胶木或尼龙等合成树脂材料或木材。 作业时,在人体的隐私部可配戴硬质安全罩。 所述作业头与作业头电机采用套接 插销式螺栓连接或直接螺纹连接;柔性作业 部与转轴连接或与径向支撑连接采用不锈钢螺旋紧固绑带连接;径向支撑与转轴采用插销 式螺栓连接,根据作业目的或需要随心所欲地更换不同功能特点的作业头或柔性作业部, 快速、灵活、方便。 所述机架、防跌倒护腰杆及脚踏板均可采用不锈钢管、木质、竹质或塑料材料制 成;采用木质或塑料材料的导轨设置有不锈钢条作为导轨面。所述外壳可采用金属皮、合成 9 CN 111588294 A 说 明 书 7/10 页 树脂、铸塑、铝塑、纤维板等材料制成,壳体的支撑骨架可有可无。 优选地,所述多功能搓澡机,还包括下述A、B、C、D或E所述的控制装置: A、语音控制装置,包括 麦克风,通过I/O口与语音芯片模块连接;采集人嗓发出的各种命令; 语音芯片模块,包括语音芯片电路、振荡电路、I/O口组和存储器;识别和执行人嗓 发出的各种命令; 适配器模块,包括功率适配电路或/和通信信号耦合电路,通过有线或无线方式连 接I/O口组和多功能搓澡机电气设施; 电源模块,与所述各组成部分连接,为各组成部分提供工作所需的电压和电能; B、语音控制装置,包括 智能音响,采集人嗓发出的各种命令; 智能设备,识别和执行人嗓发出的各种命令; 智能开关,与多功能搓澡机电气设施连接; 适配器模块,包括功率适配电路或/和通信信号耦合电路,通过有线或无线方式连 接智能设备与多功能搓澡机电气设施; 电源模块,与所述各组成部分连接,为各组成部分提供工作所需的电压和电能; C、人工智能(AI)控制装置,包括 AI芯片模块,包括AI芯片电路、振荡电路、I/O口组和存储器; 传感设备,安装在多功能搓澡机输出各物理量的部位; 适配器模块,包括功率适配电路或/和通信信号耦合电路,通过有线或无线方式连 接传感设备与I/O 口组及I/O口组与多功能搓澡机电气设施; 电源模块,与所述各组成部分连接,为各组成部分提供工作所需的电压和电能; D、人工智能(AI)控制装置,包括 智能设备; 传感设备,安装在多功能搓澡机输出各物理量的部位; 适配器模块,包括功率适配电路或/和通信信号耦合电路,以有线或无线方式构成 传感设备、智能设备及多功能搓澡机电气设施三者之间的连接; 电源模块,与所述各组成部分连接,为各组成部分提供工作所需的电压和电能; E、设置在机架上的由按钮、旋钮组成的手动控制装置。 所述语音控制装置与语音控制代码结合,构成多功能搓澡机语音控制系统;人工 智能(AI)控制装置与人工智能(AI)控制代码结合,构成多功能搓澡机人工智能(AI)控制系 统。 多功能搓澡机电气设施,包括多功能搓澡机正、反双向驱动装置、作业头电机、脚 底按摩电机、电吹风、淋浴喷头水泵和电磁阀等。所述控制系统可控制该机所有电机的启、 停、变向及变速,还可调控淋浴喷头的水温、水流量、电吹风温度、淋浴喷头和电吹风摆角大 小等各种物理量。 所述智能设备包括智能手机、电脑及含智能芯片的微电脑设备等。无线连接方式 包括WIFI、蓝牙或红外线等。 手动控制装置可以单独使用或配合所述语音控制系统、人工智能(AI)控制系统使 10 CN 111588294 A 说 明 书 8/10 页 用。 优点: 1.采用语音控制或人工智能(AI)控制系统,充分解放人的手脚,宜人化程度高; 2.多功能搓澡过程控制流畅、方便、高效; 3.采用人工智能(AI)控制系统,可进一步对多功能搓澡过程中的电机转速、水温、 风温、摆角等调控,减少人工干预,科学、智能。 4.多功能搓澡过程成为一种享受过程。 附图说明 图1是由轮状和盘状混合支撑构成的多功能搓澡作业头结构示意简图; 图2是图1的B向旋转示意图; 图3是利用离心原理构成的多功能搓澡作业头结构示意简图; 图4是多功能搓澡机(移除多功能搓澡作业头)的结构示意图。 图5是多功能搓澡机的外观示意图。 图中:多功能搓澡作业头电机100、正、反转双向机械减速电机101、转轴200、轴向 槽201、多功能搓澡作业部300、圆柱弹簧301、柔性多功能搓澡条304、绑绳308、绑扎带309、 过孔310、支撑轮311、圆盘支撑400、轴套401、滑移槽402、定卡槽403、弹簧过孔404、螺母 413、拆装槽415、柱销500、圆环501、挂钩502、立式机架600、丝杠601、水平支架602、立柱 603、柱面604、后端面605、连接孔606、行程挡块607、脚踏板608、顶架609、脚底按摩电机 610、脚底按摩辊611、立体角度角码612、机壳800、通孔导轨槽801、按钮和旋钮802、旋开门 803、花洒支撑座804、扶手805、门把手806。











