
技术摘要:
本发明涉及一种用于确定机动车辆的内部空间的至少一个部分区域中的信息的设备,其中所述机动车辆具有用于照明所述内部空间的光源,并且该照明借助于由所述光源发射的光束来进行,其中所述光束遵循从所述光源到所述内部空间的待照明部分区域的发射路径,其特征在于,所 全部
背景技术:
机动车辆越来越多地配备有辅助系统、安全系统或甚至自主驾驶系统。在这种部 分或高度自动驾驶的背景下,车辆内部空间观察变得越来越重要。理想情况下,在此应当检 测所有乘员的3D数据。这些数据的检测尤其是与被动安全性(Passive Safety)有关。例如, 安全气囊的展开方式应当与要保护的乘员适配。仅当有人实际上坐在相应的座位上时,才 能激活安全带提醒装置(Seat Belt Reminder)。安全带的该功能应当与极端身体姿势(脚 在仪表盘上,膝盖夹到前排座椅的靠背,躺下……)适配。此外,如果识别出并且已知相应的 乘员,则舒适度和信息娱乐功能可以自动地与这些乘员适配。此外,在新的HMI概念的范围 内越来越多地使用手势控制,对于所述手势控制,检测高分辨率的3D数据是有利的。检测这 样的数据的一种可能性是使用ToF摄像机(飞行时间(Time-of-Flight)摄像机),所述摄像 机利用近红外范围内的光,例如波长为850nm或940nm的光工作。 汽车制造商拒绝在车顶内衬中间安装带有鱼眼透镜的光学传感器,因为这样的概 念不适用于具有全景车顶的车辆或敞篷车。相反,安装在后视镜位置处的光学传感器由于 几何原因无法检测整个后排座椅,更不用说可能的其他成排座椅了,因为前排座椅遮挡了 很大的空间区域。然而,例如识别后排座椅上的、必要时在朝后取向的儿童座椅中的儿童是 重要的和难以解决的应用情况。 从光学器件中已知全息元件。与常规的光学器件不同,对于被实现为体积全息图 的全息光学元件来说,光束偏转不是通过折射预给定,而是通过在体积光栅处的衍射来预 给定。所述全息光学元件能够以透射和反射方式制造,并且通过自由选择入射角和出射角 或衍射角,所述全息光学元件可以实现新的构造形式。在此,全息衍射光栅被曝光到薄膜中 (全息材料6μm-200μm 载体衬底>60μm),在那里形成布拉格光栅,并且理论上达到100%的 效率。通过体积衍射,附加地还可以为所述全息光学元件分配特征性的波长和角度选择性 或滤光器功能。依据记录条件(波长,角度),仅来自限定方向并具有限定波长的光在该结构 处被衍射。 4 CN 111615639 A 说 明 书 2/7 页
技术实现要素:
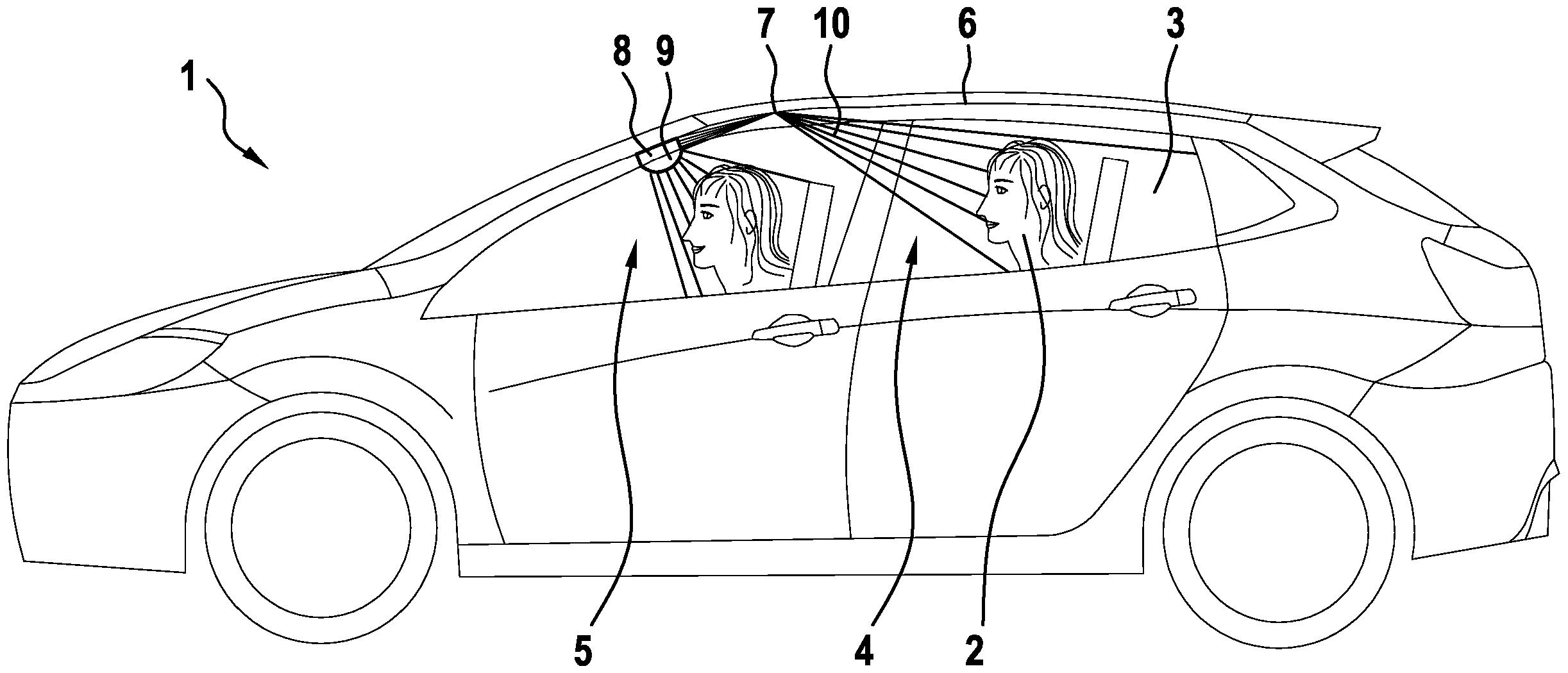
有利地,根据本发明的设备使得传感器的记录范围能够扩展到内部空间的多个附 加的部分区域。 根据本发明,通过在独立专利权利要求中说明的特征使这成为可能。本发明的其 他构型是从属权利要求的主题。 根据本发明的用于确定机动车辆的内部空间的至少一个部分区域中的信息的设 备,其中所述机动车辆具有用于照明所述内部空间的光源并且所述照明借助于由所述光源 发射的光束来进行,其中所述光束遵循从所述光源到所述内部空间的待照明部分区域的发 射路径,其特征在于,所述机动车辆具有用于信息检测的传感器,并且所述信息检测借助于 包含与所述内部空间的所述部分区域有关的数据的光束来进行,其中所述光束遵循从所述 内部空间的被照明的部分区域到所述传感器的接收路径,并且其中存在用于对所述光束进 行衍射的全息图并且所述全息图被定位成,使得所述全息图能够实现所述光束既沿着所述 发射路径又沿着所述接收路径的衍射。 这被理解为检测来自所述内部空间的部分区域的数据。在此情况下,这例如可以 是关于所述内部空间的一般信息(例如,座位占用)或是对乘员的确定(例如,识别)和/或是 对所述乘员的身体姿势、手势、头部取向、面部表情等的观察(监视)。在此,所确定的数据也 可以是三维数据。为了确定这些数据例如使用3D摄像机,例如飞行时间摄像机。此外,作为 全息图可以使用任何类型的全息光学元件,尤其是反射全息图。全息图也被理解为多个全 息图的整个系统(例如多个全息图的层复合体)和/或集成到车辆部件中(例如将全息图涂 敷到车顶内衬中的玻璃板上)。此外,对所述全息图的定位与所述摄像机和照明设备的位置 协调地进行。同样考虑要观察的部分区域、波和角度选择性以及计划的光波长。定位被理解 为既指局部位置又指以特定角度进行的可能安装。考虑到所述内部空间的已知几何关系和 元件的位置,可以例如借助于计算机单元从光波中确定期望的信息,例如与乘员在部分区 域中的位置有关。除了术语“发射路径”和“接收路径”之外,经常还谈及“发射方向”或“发射 通道”,类似的还有接收方向或接收通道。在此,所述发射路径从所述光源延伸到要确定的 对象,并且所述接收路径从要确定的对象延伸到所述传感器。发出的光束既可以是用于纯 照明所述内部空间的光束,也可以是用于记录所述内部空间的光束。当然,以正确的物理方 式,代替光束地也只会谈及术语“光”,为了支持该想法的图像表示使用术语“光束”。 由此,可以有利地创建用于观察所述内部空间的特殊的部分区域的系统。尤其是, 由此使得能够利用简单的手段来观察内部空间,所述内部空间由于所述摄像机的位置而不 能直接被检测到。此外,灵活使用该系统是可能的,因为所述全息图可以适配于具有不同几 何尺寸的车辆。通过所述全息图在两个方向上的作用,所述全息图既可以用于照明沿所述 发射路径的部分区域,也可以用于沿所述接收路径返回引导所述光束。该系统使得可以降 低成本,因为仅使用一个(或少量的)传感器即可检测所有部分区域或乘员。此外,在要分析 的部分区域中不需要额外的光源。通过部件数量减少还得出安装空间减小。由于通过所述 系统不仅可以识别前排的乘客,得出了后排座椅上乘员的舒适度的提高——例如通过自动 适配信息娱乐和舒适功能。此外,所提出的解决方案的特征在于低的成本结构——除了部 件数量减少之外,所使用的全息图也相对便宜。此外,所述全息图的角度和波选择性减少了 通过环境光引起的干扰光,从而所确定的数据具有高质量。 5 CN 111615639 A 说 明 书 3/7 页 在有利的实施方式中,所述设备的特征在于,用于信息检测的所述传感器包括3D 摄像机。 这被理解为确定关于所述部分区域的三维数据。为此使用所谓的3D摄像机。例如 可以使用飞行时间摄像机。所述飞行时间摄像机具有带特殊像素的特殊成像器,并确定光 束在发射和返回之间所需的时间,从中可以确定距离。通过完全地以三维方式检测所有部 分区域和乘员,可以进一步提高安全性,例如通过在被动安全性方面的特殊适配。 在一种可能的构型中,所述设备的特征在于,所述全息图定位在车辆顶蓬处。 如已经提到的,术语“定位”应该在广义上理解,例如全息图如何被引入、涂敷、安 装、集成等。有利地,通过这种定位——例如借助于安装在后视镜位置处的摄像机,可以在 几何上完全检测后排座椅。不会通过前排座椅遮挡光路。有利地,所述全息图即使在具有全 景车顶的车辆中也可以定位在所述全景车顶处,因为所述全景车顶对可见光保持透明。 在优选的实施方式中,所述设备的特征在于,由所述光源发射的光束在光学元件 处向着所述全息图的方向偏转。 光学元件应被理解为具有特殊形状或特殊材料组合的物镜或其他光学器件,并因 此能够实现限定的入射角和出射角。所述光学元件被定位和/或安装到照明设备和/或传感 器处或紧邻所述照明设备和/或所述传感器的地方。所述光学元件同样在多个方向上起作 用,也就是说,它们使得光波能够沿着所述发射路径和所述接收路径进行传导和偏转。在此 情况下,在发射方向上将所述光束向所述全息图的方向偏转。此外,在接收方向上将所述光 束基本上向所述传感器的方向偏转。替代地,也可以借助于光学元件向远离发送方的空间 上已知的接收方的方向进行偏转。由此可以有利地改善所述系统的功能。由此也得到关于 所述传感器和所述光源的定位和取向的扩大的设计余地以及安装空间优点。 在替代的扩展方案中,所述设备的特征在于存在多个全息图,并且尤其是,不同的 全息图对不同的光波长进行衍射。 这被理解为可以借助于不同的全息图来照明或观察所述内部空间的不同部分区 域。例如,为此可以利用多色光来进行照明。在每个全息图处仅衍射特殊光波长或特殊光波 长范围的光波。对应于相应衍射全息图的角度选择性,特殊光波长范围的相应光束以相应 的出射角被转发到所述内部空间的特定部分区域中。有利地,通过使用多个全息图可以检 测例如在公共汽车中的其他成排座椅,例如第三或其他成排座椅。所述全息图的定位可以 例如在车辆中的相同位置处进行。当然,有利地也可以设想将至少一个或多个全息图定位 在第二位置和/或其他位置处。 在有利的构型中,所述设备的特征在于,所述全息图被构造为多重全息图或层堆 叠-个体全息图,或者被构造为多重全息图和层堆叠-个体全息图的组合。 这被理解为存在多个全息图用于对所述光束进行衍射。在此,每个全息图都有它 自己的特征。这些全息图可以在空间上位于同一位置处。该实施方式例如作为个体全息图 的层堆叠进行。具有不同特征(例如波选择性)的多个全息图的使用尤其适合于与发射不同 光波长或不同光波长范围的光源的多色光的使用相结合。因此,可以有利地将个体全息图 的效率与所述系统适配。在多重全息图的情况下,效率随着全息图的数量增加而降低。在层 堆叠的情况下,所述层堆叠处的散射效果会出现问题,或者存在不切实际的层堆叠。此外, 可以有利地在所述传感器前面使用滤色器。 6 CN 111615639 A 说 明 书 4/7 页 在一种可能的实施方式中,所述设备的特征在于,为了照明而发射的光束具有不 同的光波长。 这被理解为使用具有不同光波长的光束。通过全息图的相应特征,于是导致在所 述全息图处以特定的角度衍射特定的光波长。例如,多个全息图可以定位在同一位置处作 为堆叠全息图。在此情况下,入射光束(发射路径)具有相同的入射角。限定的光波长在相关 联的全息图处被衍射,并以特定的出射角输出。在此,不同的光波具有不同的出射角。被反 射的光束(接收路径)的衍射或偏转以类似的方式进行。可以通过使用滤色器以及与滤色器 组合来分离传感器处的信息。有利地,通过所述全息图的高度的角度和波选择性可以进行 在所述内部空间的不同区域中的信息确定。由此,例如可以观察所述内部空间的不同部分 区域。 在优选的扩展方案中,所述设备的特征在于,所述光束被构造为多色光,尤其是使 用频谱宽的光源来产生所述多色光,或者使用具有多个限定的光波长的光源来产生所述多 色光,或者使用频谱窄带地发射的光源来产生所述多色光,所述光源的光波长可以被调谐。 有利地,通过将多色光与具有不同光波长和角度选择性的多个全息图结合,可以 使用仅一个光源和仅一个摄像机来记录和观察所述内部空间的不同部分区域。 在替代的实施方式中,所述设备的特征在于存在多个光源,并且尤其是,存在多个 发射具有不同光波长的光的光源。 有利地,通过使用多个例如具有不同光波长的光源,可以单独照明所述内部空间 的要记录的每个部分区域。由此可以实现在安装空间和安装体积方面的优点。 在一种可能的扩展方案中,所述设备的特征在于存在滤色器,尤其是存在用于选 择限定的光波长的可开关的滤色器。 这被理解为存在并且使用滤色器,以便在传感器前面从具有不同光波长的光束中 选择性地提取信息。滤色器尤其是被定位和/或安装在所述传感器处或紧邻所述传感器的 地方。例如,也可以存在并且使用多个滤色器。此外,有利地将滤色器分配给所述传感器的 限定的像素。替代地,还可以在对所述传感器中接收到的光束进行同步评估的情况下顺序 地操控所述光源。 在优选的实施方式中,所述设备的特征在于,存在多个传感器,并且尤其是,存在 多个用于检测不同光波长的传感器。 这被理解为存在并且使用一个或多个其他传感器——至少其他成像器,以观察所 述内部空间的不同部分区域。这些附加传感器被定位为与原始传感器(成像器)略有位移地 布置。此外,有利地,不仅可以使用一个或多个其他传感器,而且也可以为每个摄像机使用 相对应的光源。 此外,根据本发明规定了一种用于确定机动车辆的内部空间的至少一个部分区域 中的信息的方法,其中所述机动车辆具有用于照明内部空间的光源并且所述光源发射沿着 发射路径照明所述内部空间的部分区域的光,在该部分区域中应当确定所述信息。根据本 发明,该方法的特征在于所述机动车辆具有用于信息检测的传感器,并且所述传感器接收 沿着接收路径传输与所述内部空间的所述部分区域有关的数据的光,并且其中光在全息图 处衍射以确定所述部分区域的信息,其中所述全息图被设计为使得所述光既沿着所述发射 路径又沿着所述接收路径在所述全息图处衍射。 7 CN 111615639 A 说 明 书 5/7 页 关于所述方法的进一步解释和优点,参考前面的说明。 在有利的实施方式中,所述方法的特征在于,借助于3D摄像机确定所述内部空间 的所述部分区域的三维数据,其中所述3D摄像机在发射方向上以及在接收方向上的光路都 在所述全息图处偏转,其中所述全息图尤其是定位在车辆顶蓬处。 这被理解为使用至少一个(或多个)3D摄像机来例如观察所述内部空间的所述部 分区域或识别人或人的身体姿势或手势。例如,为此使用飞行时间摄像机。所述全息图定位 在车辆顶蓬处,例如,在车柱A-B之间和/或B-C之间和/或C-D之间和/或A-C之间。当然,也可 以设想将所述全息图安装到不同区域和/或还跨多个区域地安装。 在可能的构型中,所述方法的特征在于,借助于在所述全息图处衍射的光确定来 自所述内部空间的一个部分区域的信息,并且附加地,借助于采取直接路径的光确定来自 所述内部空间的另外的部分区域的信息。 这被理解为,借助于全息图来观察部分区域,这些部分区域只能借助于光束的衍 射来观察,但不能借助于直接的光束来观察。因此所述方法使得能够借助于在全息图处衍 射的光束来确定来自所述内部空间的部分区域的信息,其中不能借助于直接的光束来检测 所述部分区域。但是,此外还直接观察其他部分区域。由此,可以有利地显著扩大传感器的 记录区域,并且可以节省其他部件。 在优选的实施方式中,所述方法的特征在于,确定来自内部空间的不同部分区域 的信息,其中使用多个全息图并且不同的全息图衍射不同波长的光,并且通过具有分别限 定的光波长的光为每个部分区域进行信息确定。 这被理解为每个全息图都会衍射特定波长(实际上是小波长范围)的光(波长选择 性)。此外,通过所述全息图以特征性的方式衍射所述特定波长的光(角度选择性)。也就是 说,例如全息图将特殊波长的光以10°的入射角偏转到30°的出射角。另外的光波长不被衍 射或没有被衍射到该出射方向。相反,第二全息图将不同波长的光以10°的入射角衍射到 40°的出射角。但是,再次地,所述第二全息图不衍射第一光波长。该特征当然是限定的和已 知的。该特征可以通过材料参数(全息层的厚度和折射率调制)与相应的系统/要求相适配。 与已知的全息图定位组合,可以非常精确地确定可以使用哪些波长的光来观察所述内部空 间的哪个部分区域。 附图说明 应当指出,说明书中单独列出的特征可以以任何技术上有意义的方式相互组合, 并且示出了本发明的其他构型。本发明的其他特征和适宜性由基于附图对实施例的描述得 到。 在附图中: 图1示出了借助于全息图的信息确定的示意图;和 图2示出了单色光束在全息图处的衍射行为;和 图3示出了多色光束在全息复合体处的衍射行为;和 图4示出了具有由HOE偏转的光束的ToF摄像机的接收路径;和 图5示出了具有多个光束和示例性的光学元件以及滤色器的ToF摄像机的接收路径,所 述多个光束分别由HOE复合体适当地偏转;和 8 CN 111615639 A 说 明 书 6/7 页 图6示出了所述方法的示例性表达的方法步骤。











