
技术摘要:
本发明涉及一种智能送餐车,所述智能送餐车包括:行走机构,所述行走机构能够沿云轨运动,所述行走机构包括供电电源及与所述供电电源连接的充电配合件;载物机构,所述载物机构包括控制电路、电池,以及与所述控制电路或所述电池连接的充电件;以及升降机构,所述升降 全部
背景技术:
随着自动化、智能化技术的发展,自动引导运输车(AGV小车)被广泛应用于各个行 业,可实现物品的搬运、放置、转移等作业。在餐饮行业中,基于AGV小车而衍生出来的智能 送餐车,可代替人工进行送餐作业,不仅可以减轻餐饮服务人员的劳动强度,提升送餐效 率,还能够有效缓解市场上劳动力短缺的问题。其中,可沿架设在餐饮场所高空位置的云轨 行驶的智能送餐车是一类应用前景较好的智能送餐车。 传统的与云轨配合的智能送餐车在进行送餐作业时,通常是先沿云轨运动至上菜 口,通过上菜口机构将餐品传送到送餐车上,然后送餐车沿云轨运动至位于顾客餐桌上方 的下菜口,再通过下菜口机构将餐品传输至顾客餐桌上,从而完成自动送餐作业。然而,上 述送餐过程,餐品需要在上菜口机构、送餐车及下菜口机构等多个设备之间进行传递,不仅 成本较高,并且很难避免不同设备之间的传递误差,因而存在较大的餐品掉落风险。另外一 些智能送餐车配备有可升降的载物机构,当送餐车运动至下菜口时,将载物机构下降至顾 客餐桌上,顾客直接进行取餐即可,此类智能送餐车虽然能够在一定程度上避免不同设备 之间的传递误差,但载物机构的充电问题一直是较难解决的问题。
技术实现要素:
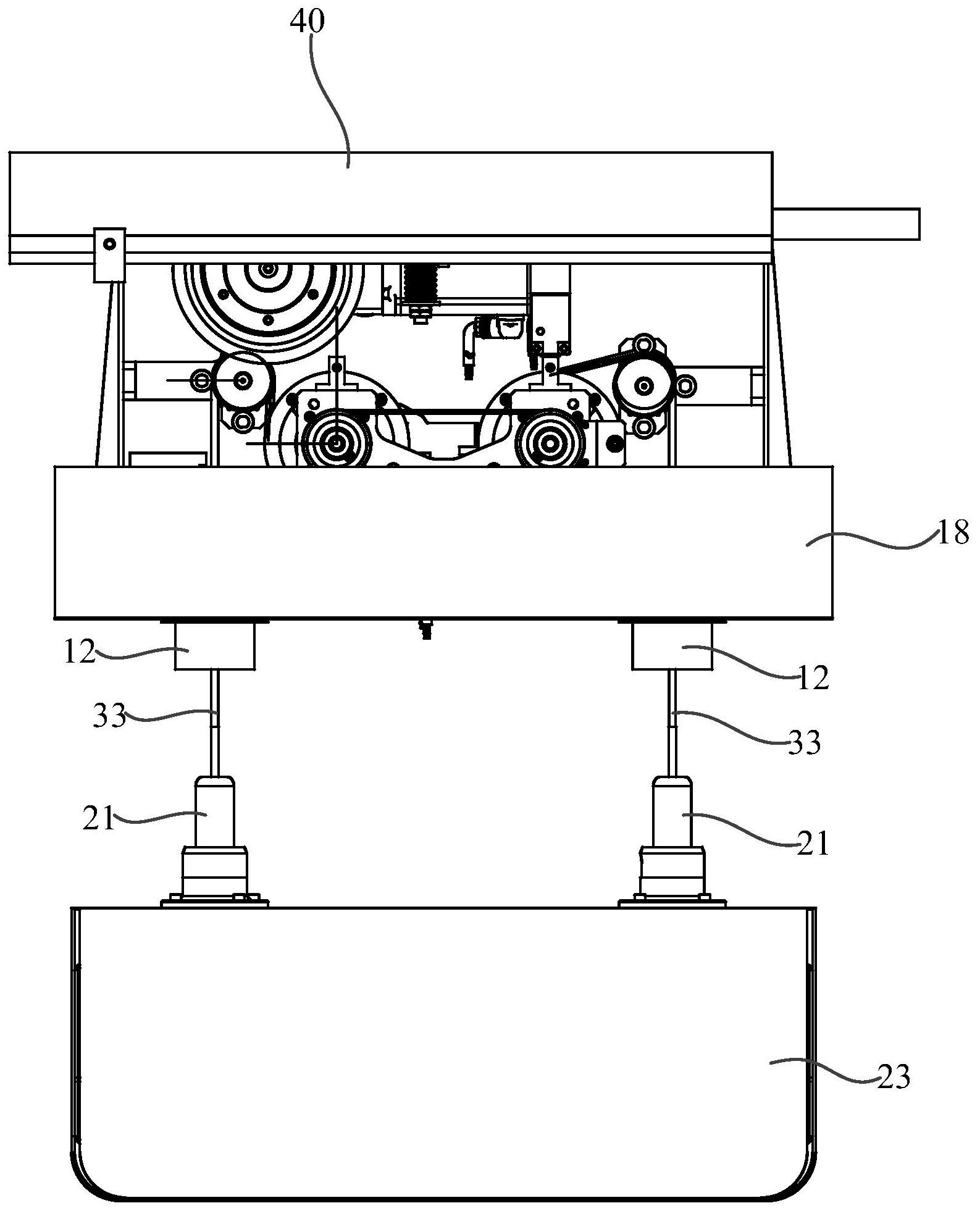
基于此,有必要针对上述问题,提供一种智能送餐车,该智能送餐车能够有效避免 不同设备之间的传递误差,降低餐品掉落风险,并且还能够很好地解决载物机构充电困难 的问题。 一种智能送餐车,所述智能送餐车包括: 行走机构,所述行走机构能够沿云轨运动,所述行走机构包括供电电源及与所述 供电电源连接的充电配合件; 载物机构,所述载物机构包括控制电路、电池,以及与所述控制电路或所述电池连 接的充电件;以及 升降机构,所述升降机构安装于所述行走机构上,所述升降机构用于驱动所述载 物机构进行升降;当所述载物机构上升至预设高度时,所述充电件能够与所述充电配合件 接触导通,以使所述控制电路或所述电池与所述供电电源导通形成充电回路。 上述智能送餐车在进行送餐时,通过服务人员或机器人将餐品放置于载物机构 内,通过升降机构驱动载物机构上升至预设高度,然后行走机构沿云轨运动直至将载物机 构移送至位于顾客餐桌上方位置,再通过升降机构驱动载物机构下降至顾客餐桌上,顾客 直接进行取餐即可,整个送餐过程由智能送餐车独立完成,无需再设置上菜口机构和下菜 口机构等中间传递设备,能够有效避免不同设备之间的传递误差,降低餐品掉落风险,并且 还可有效降低成本。另外,当载物机构上升至预设高度时,载物机构上的充电件与行走机构 4 CN 111543836 A 说 明 书 2/9 页 上的充电配合件接触导通,使载物机构的控制电路或电池与行走机构的供电电源导通形成 充电回路,从而能够为载物机构的控制电路或电池进行充电,以保证载物机构电量充足,如 此,在进行送餐的同时能够很好地解决载物机构充电困难的问题。 在其中一个实施例中,所述充电件为朝向所述行走机构一侧延伸的充电桩,所述 充电配合件为朝向所述载物机构一侧开口的充电套,所述充电桩能够与所述充电套插接并 导通。 在其中一个实施例中,所述升降机构包括动力组件、绕绳组件及牵引绳,所述牵引 绳的一端与所述充电桩连接,另一端穿过所述充电套而与所述绕绳组件连接,所述动力组 件与所述绕绳组件驱动连接以使所述绕绳组件缠绕或展开所述牵引绳,进而带动所述载物 机构升降。 在其中一个实施例中,所述充电桩间隔设置有两个,分别为与所述控制电路的正 极连接的正极充电桩,以及与所述控制电路的负极连接的负极充电桩;所述充电套间隔设 置有两个,分别为与所述供电电源的正极连接的正极充电套,以及与所述供电电源的负极 连接的负极充电套;所述正极充电桩能够与所述正极充电套插接并导通,所述负极充电桩 能够与所述负极充电套插接并导通。 在其中一个实施例中,所述行走机构还包括车架、支撑轮组件和驱动轮组件,所述 车架通过所述支撑轮组件可活动地安装于所述云轨的轨道槽内,所述驱动轮组件连接于所 述车架,所述驱动轮组件包括驱动轮和驱动件,所述驱动轮用于与所述轨道槽的顶壁滚动 配合,所述驱动件用于驱动所述驱动轮转动,以带动所述车架沿所述云轨运动。 在其中一个实施例中,所述驱动轮组件还包括啮合齿轮,所述啮合齿轮与所述驱 动件驱动连接,所述啮合齿轮用于与设于所述云轨上的齿条相啮合。 在其中一个实施例中,所述车架包括在垂直于所述车架的行进方向上相对设置的 两个侧支撑板,所述支撑轮组件包括可绕横向枢轴转动的第一支撑轮,以及可绕竖向枢轴 转动的第二支撑轮,各所述侧支撑板均可转动地安装有至少一个所述第一支撑轮和至少一 个所述第二支撑轮,所述第一支撑轮用于与所述轨道槽的底壁滚动配合,所述第二支撑轮 用于与所述轨道槽的侧壁滚动配合。 在其中一个实施例中,所述行走机构还包括安装于所述车架上的制动器,所述制 动器能够对所述第一支撑轮和/或所述第二支撑轮进行制动。 在其中一个实施例中,所述车架在行进方向的相对两侧分别设有第一碰撞梁和第 二碰撞梁,所述第一碰撞梁和所述第二碰撞梁用于在与障碍物发生碰撞时进行缓冲。 在其中一个实施例中,所述行走机构还包括碰撞检测开关,所述碰撞检测开关能 够在所述第一碰撞梁和/或所述第二碰撞梁发生碰撞时触发制动操作。 在其中一个实施例中,所述行走机构还包括防撞检测元件,所述防撞检测元件用 于对所述行走机构行进方向前侧的障碍物情况进行检测,并将检测信息反馈至所述智能送 餐车的控制系统。 在其中一个实施例中,所述行走机构还包括设于所述车架上的位置检测元件,所 述位置检测元件用于识别所述行走机构当前所在位置信息,并将所述当前所在位置信息反 馈至所述智能送餐车的控制系统。 在其中一个实施例中,所述载物机构还包括箱体、箱门、驱动器和自锁组件,所述 5 CN 111543836 A 说 明 书 3/9 页 箱体设有取放口,所述箱门与所述箱体可活动连接,所述箱门用于打开或关闭所述取放口, 所述驱动器用于驱动所述箱门在开门位置和关门位置之间进行切换,所述自锁组件用于将 所述箱门与所述箱体之间进行锁合或解锁,所述驱动器和所述自锁组件分别与所述控制电 路电性连接,所述充电件设于所述箱体的顶部。 附图说明 构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实 施例及其说明用于解释本发明,并不构成对本发明的不当限定。 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1为本发明一实施例的智能送餐车与云轨配合的结构示意图; 图2为图1中的智能送餐车与云轨配合的主视图; 图3为图1中的智能送餐车与云轨配合的侧视图; 图4为本发明一实施例的智能送餐车的剖面示意图; 图5为本发明一实施例的智能送餐车的行走机构的结构示意图; 图6为图5中的行走机构的侧视图; 图7为图5中的行走机构的主视图; 图8为图5中的行走机构的俯视图; 图9为本发明一实施例的智能送餐车的升降机构的结构示意图; 图10为本发明一实施例的智能送餐车的载物机构的结构示意图; 图11为图10中的载物机构另一状态的结构示意图; 图12为图10中的载物机构去掉顶盖后的结构示意图。











