
技术摘要:
本发明公开了一种阵列式声波扫描的高精度钻孔成像装置,扫描头位于保护壳体的底部,导向盖设置在扫描头底部,保护壳体由定位台板分隔为电路模块腔和扫描动力腔,扫描头的下部周向均匀布设有N个声波探头,本发明还公开了一种阵列式声波扫描的高精度钻孔成像方法,本发明 全部
背景技术:
岩体是由裂隙、节理、层理、断层等不连续结构面组成的复杂地质结构体。长期以 来,对这些不连续结构面的研究构成了工程地质研究的基础,它不仅在描述或揭示地质特 征的形成或构造方面,而且更重要地在于研究岩体的工程地质都有着重要意义。目前,在钻 孔的岩体结构勘察方面,钻孔电视一直是最佳的探测工具,能够直观的呈现钻孔岩壁的岩 体结构特征,对工程地质研究提供重要数据。针对实际的钻孔工程探测环境,由于钻井液的 影响,或者泥浆护壁等因素,致使钻孔内部通常为肮脏或浑浊的介质,从而采用声学成像原 理的钻孔电视更适合。 在声学钻孔电视的实际探测过程中,由于深部钻孔难以完全垂直,或者电缆下放 存在位置偏移,均会造成钻孔声学探头难以居中的现象。在声学扫描成像过程中,声学设备 实时记录各方位的是探头发射声学信号到接收钻孔岩壁反射回波信号的声时和声幅参数, 若声学探头偏离钻孔中心,声学设备所记录的声时和声幅参数均不能反映实际的钻孔岩体 结构特征,形成的钻孔图像也会存在误差,甚至形成错误的钻孔图像。为此,有部分声学钻 孔电视为了提高钻孔声学成像精度,在仪器的中间部位或者首尾部分增设了探头对中器或 者探头扶正器,通过对设备的改进,能够在一定程度上改进钻孔成像质量,但是,通过增设 探头对中器或者探头扶正器,声学探头的长度会明显增加,增加了探头卡孔的探测风险,同 时,也相应的增加了探测成本,此外,通过仪器增设探头对中器或者探头扶正器,也难以确 保声学探头完全居中,微小的偏差,将会对成像质量有较大影响。 鉴于现有声学钻孔成像探测技术存在的问题,本发明提出了一种阵列式声波扫描 的高精度钻孔成像方法及装置,从根本上解决了因仪器探头不居中而导致钻孔声学图像出 现失真或者低精度的探测难题,该装置通过在同一断面布设多个声波探头,并根据不同探 头获取的数据综合分析和反算出仪器探头与真实钻孔之间的实时位置关系,同步结合首次 回波的声时参数与声幅参数,有效提高了声波扫描的钻孔成像精度,由于本文算法能够有 效实时计算出声波扫描位置的传播介质声速,能够对不同钻孔的深度以及不同钻孔环境介 质进行实时校正,即适应能力更强,此外,由于本装置不需要探头对中器或者探头扶正器, 能够有效缩短孔内探头的长度,降低探测过程中卡孔的风险。阵列式声波扫描的高精度钻 孔成像装置的优点在于:1)探测精度高。探测装置能够根据不同探头获取的数据综合分析 和反算出仪器探头与真实钻孔之间的实时位置关系,同步结合首次回波的声时参数与声幅 参数,有效提高了声波扫描的钻孔成像精度;2)探测数据丰富。探测装置在同一断面布设了 多个声波探头,同一次扫描可以获得多个方位的声学参数,获取的数据通过有效筛查,能够 4 CN 111608644 A 说 明 书 2/10 页 降低局部数据对整体数据的干扰,其内含信息更加丰富;3)探测适应能力强。通过综合分析 不同阵列探头获取的数据,根据几何对应关系,能够有效实时计算出钻孔内流体介质的传 播声速,不会因钻孔内流体介质的差异以及钻孔深度的差异,而影响到钻孔成像的结果及 精度;4)结构小巧,布局灵活,连接简洁,易于实施。
技术实现要素:
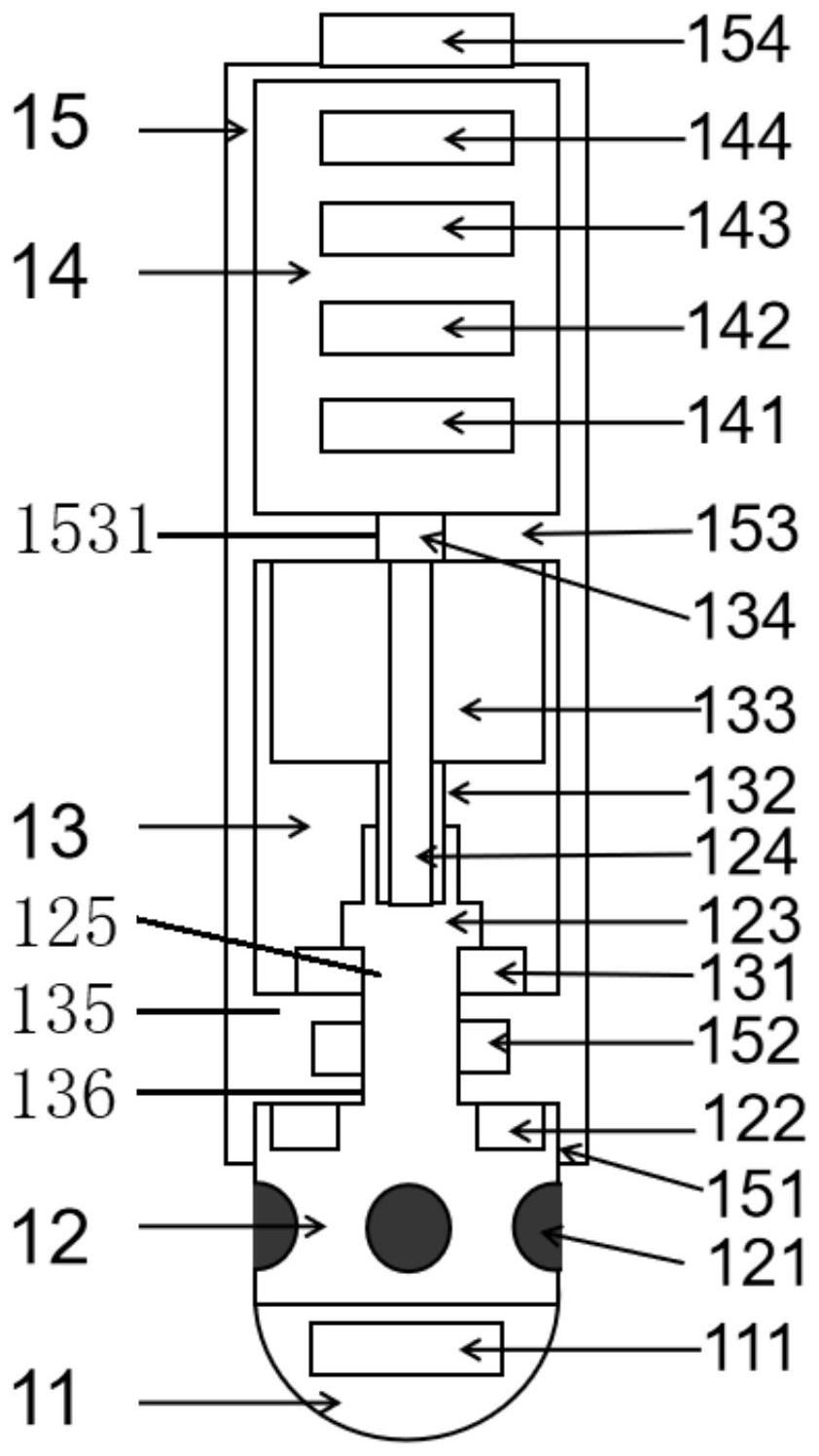
本发明的目的就是为了克服以往因仪器探头不居中而导致的声波钻孔成像结果 失真和低精度的探测问题,提出一种阵列式声波扫描的高精度钻孔成像装置,还提供一种 阵列式声波扫描的高精度钻孔成像方法,实现对不同钻孔的深度以及不同钻孔环境介质进 行实时校正,有效提高声波扫描的钻孔成像精度。该装置构思新颖、设计巧妙、尺寸合理、实 施容易,是声学钻孔成像技术的新一代装置,具有广阔的应用前景。 为了实现上述目的,本发明采用以下技术措施: 一种阵列式声波扫描的高精度钻孔成像装置,包括孔内探头,孔内探头包括导向 盖、扫描头、扫描动力腔、电路模块腔和保护壳体, 扫描头位于保护壳体的底部,导向盖设置在扫描头底部,保护壳体由定位台板分 隔为电路模块腔和扫描动力腔, 扫描头的下部周向均匀布设有N个声波探头,N个声波探头布设在同一水平面上,N 的数量大于等于3, 扫描动力腔底部设置有导向台板,导向台板和扫描动力腔底部边沿构成圆形的导 向槽,导向台板中心开设有导向孔,导向孔的内壁设置有旋转密封圈,保护壳体、导向槽、导 向孔的中心轴线共线,扫描头顶部设置在导向槽内,扫描头的顶面设置有端面轴承,导向杆 底端与扫描头的顶面中心连接,导向杆的顶部穿过导向孔且设置有限位台,限位台与导向 台板顶面之间设置有推力轴承,导向杆内设置有导线孔,N个声波探头的导线和电子罗盘的 导线从导线孔中引出。 如上所述的电路模块腔内安装有声学模块、控制模块、信号调制模块和电路稳压 模块,控制模块分别与声学模块和信号调制模块连接。 如上所述的扫描动力腔的顶部安装有动力电机,动力电机为空心轴步进电机,动 力电机的空心轴下端与动力连接轴的顶端连接,动力连接轴的底端与导向杆顶端连接。 如上所述的动力电机的空心轴上端与电滑环的滑动导线部固定,电滑环的滑动导 线部通过导线分别与电子罗盘、动力电机、以及N个声波探头电性连接, 电滑环的固定导线部与定位台板的穿线孔1531固定,电滑环的固定导线部通过导 线分别与声学模块、控制模块和电路稳压模块电性连接。 一种阵列式声波扫描的高精度钻孔成像方法,包括以下步骤: 步骤1、通过扫描头对钻孔的各个深度进行扫描,扫描头的周向均匀布设有N个位 于同一水平面的声波探头,在同一深度,扫描头旋转不同角度测量;建立H*P行,4列的矩阵 Dn,H为深度的总个数,P为每个断面的采样次数, 矩阵Dn的第k行数据为[hq,n,i,aq,n,i,tq,n,i,vq,n,i],k=(q-1)×P i; q为当前钻孔断面的序号,q∈{1~H};n为声波探头的序号,n∈{1~N};i为同一断 面的采样次数的序号,i∈{1~P}; 5 CN 111608644 A 说 明 书 3/10 页 hq,n,i为第q个钻孔断面的第n个声波探头的第i次采样对应的深度; aq,n,i为第q个钻孔断面的第n个声波探头的第i次采样的方位角; tq,n,i为第q个钻孔断面的第n个声波探头的第i次采样的首波声时; vq,n,i为第q个钻孔断面的第n个声波探头的第i次采样的声幅; 步骤2、进行钻孔轮廓重构,具体包括以下步骤: 步骤2.1、对同一测量深度的同一次采样的各个探测头获得声时数据进行比较,获 得最大声时数据、最小声时数据和中间声时数据,以及最大声时数据、最小声时数据和中间 声时数据对应的声波探头的方位, 步骤2.2、根据传播声速speedqi,获得最大声时数据、最小声时数据和中间声时数 据对应的钻孔孔壁扫描点相对于扫描头中心原点的距离,进而获得最大声时数据、最小声 时数据和中间声时数据对应的钻孔孔壁扫描点相对于扫描头中心原点的坐标,此时的扫描 头中心原点位于当前测量深度的扫描头剖面中心, 步骤2.3、根据最大声时数据、最小声时数据和中间声时数据对应的钻孔孔壁扫描 点相对于扫描头中心原点的坐标,获得当前测量深度的当次采样对应的钻孔断面圆的关于 传播声速speedqi的圆形方程,进而获得当前测量深度的当次采样对应的钻孔断面圆的直 径,由于钻孔断面圆的直径为D,进而求取当前测量深度的当次采样对应的传播声速 speedqi, 步骤2 .4、获得当前测量深度的各次采样对应的钻孔断面圆的关于传播声速 speedqi的圆形方程,将当前测量深度的各次采样对应的钻孔断面圆的圆心坐标求平均,获 得当前测量深度的钻孔断面的圆心坐标; 步骤2.5、依次获得的各个测量深度的各次采样对应的传播声速speedqi构成矩阵 SPEED,矩阵SPEED为H行×P列的矩阵。 一种阵列式声波扫描的高精度钻孔成像方法,还包括重组步骤,具体为: 定义N个与声波探头对应的矩阵An,n∈{1~N},矩阵An为H行×P列, An(q,i)=(ln(Pm/Dn(k,4)))/(Dn(k,3)*SPEED(k,1)); k=(q-1)×P i; 其中,An(q,i)为矩阵An的第q行第i列;Dn(k,4)为矩阵Dn的第k行第4列;Dn(k,3)为 矩阵Dn的第k行第3列。 一种阵列式声波扫描的高精度钻孔成像方法,还包括重建步骤,具体为: 定义N个与声波探头对应的矩阵Bn,n∈{1~N},矩阵Bn为H行×P列, Bn(q,i)=An(q,u); 若i (n-1)*int(P/N)<=P,u=i (n-1)*int(P/N); 若i (n-1)*int(P/N)>P,u=i (n-1)*int(P/N)-P; 其中,Bn(q,i)为矩阵Bn的第q行第i列;An(q,u)为矩阵An的第q行第u列;int( )为取 整运算符;u∈{1~P}; 建立钻孔图像矩阵G, λn为各个声波探头获取数据的权重值, 6 CN 111608644 A 说 明 书 4/10 页 对钻孔图像矩阵G的每行进行归一化处理获得钻孔图像矩阵G1,钻孔图像矩阵G1* 256获得钻孔图像矩阵G2,重建结束。 本发明利用了多个声波探头,实现了阵列式声波探头钻孔扫描的合理布置,采用 扫描动力腔实现了钻孔的全方位声波扫描探测,形成了阵列式声波扫的高精度钻孔成像体 系,解决了因仪器探头不居中而导致的声波钻孔成像结果失真和低精度的探测难题,实现 了探测数据丰富,探测适应能力强,并在钻孔成像的探测精度问题上具有突破性和实质性 进展,并具有显著的科学意义和经济实用价值。 本发明相对于现有技术具有以下优势: 1、本发明能够根据不同声波探头获取的数据综合分析和反算出声波探头与真实 钻孔之间的实时位置关系,同步结合首次回波的声时参数与声幅参数,有效提高了声波扫 描的钻孔成像精度; 2、本发明在同一断面布设了多个声波探头,同一次扫描可以获得多个方位的声学 参数,获取的数据通过有效筛查,能够降低局部数据对整体数据的干扰,其内含信息更加丰 富; 3、通过综合分析不同声波探头获取的数据,根据几何对应关系,能够有效实时计 算出钻孔内流体介质的传播声速,不会因钻孔内流体介质的差异以及钻孔深度的差异,而 影响到钻孔成像的结果及精度; 4、本发明不需要对中器或者扶正器,简化了孔内探头的结构部件,实现了机械结 构的简便化; 5、本发明装置操作方便,容易实现,获得的数据更加丰富,取得的结果更加可靠, 大大地提高了探测效率; 6、本发明的构思严密、设计巧妙、尺寸合理; 7、本发明的结构体系和总体布局简单,易于实施。 总之,本发明提供了一种利用了多个声波探头,实现了阵列式声波探头钻孔扫描 的合理布置,采用扫描动力腔实现了钻孔的全方位声波扫描探测,形成了阵列式声波扫的 高精度钻孔成像体系,解决了因仪器探头不居中而导致的声波钻孔成像结果失真和低精度 的探测难题,实现了探测数据丰富,探测适应能力强,并在钻孔成像的探测精度问题上具有 突破性和实质性进展,提高了探测的可靠性和应用范围。该方法设计巧妙,构思严密,结构 体系简单,易于实施。 附图说明 图1为本发明结构示意图; 图2为孔内探头结构示意图; 图3为钻孔轮廓重构示意图; 图中:1-孔内探头;2-传输电缆;3-深度编码器;4-集成控制箱;5-工业计算机;11- 导向盖;12-扫描头;13-扫描动力腔;14-电路模块腔;15-保护壳体;111-电子罗盘;121-声 波探头;122-端面轴承;123-限位台;124-导线孔;125-导向杆;131-推力轴承;132-动力连 接轴;133-动力电机;134-电滑环;135-导向台板;136-导向孔;141-声学模块;142-控制模 块;143-信号调制模块;144-电路稳压模块;151-导向槽;152-旋转密封圈;153-定位台板; 7 CN 111608644 A 说 明 书 5/10 页 154-电缆连接头;1531-穿线孔。











