
技术摘要:
本发明公开了一种基于扭转式机电惯容的横向稳定装置,包括:左稳定杆(1a)、右稳定杆(1b)、扭转式惯容器、电机(8)、壳体(9);其中,壳体(9)被中间隔板(90)分成第一腔体(91)和第二腔体(92);第一腔体(91)中设置有扭转式惯容器部分结构,第二腔体(92)中设置有飞轮(6)和电 全部
背景技术:
横向稳定装置是当前车辆底盘系统中极为重要的零部件,其用途为在车辆转弯时 或行驶在颠簸路面上时,车辆两侧悬架的跳动程度不同。而横向稳定装置可以发生扭转变 形从而产生抗扭转的反向力矩抑制车身的侧倾,减小车身侧倾角,提高车辆行驶时的稳定 性。 惯容器的概念由剑桥大学的Smith教授在2002年提出。作为一种两端点的质量元 件,惯容器突破了单端点质量元件“接地”的限制,弥补了机电相似理论中质量与电容器对 应的空缺,可有效应用于隔振与稳定控制系统的设计。扭转惯容器属于惯容器的一种,对于 两端点的相对扭转振动,惯容器可提升系统的稳定性。 目前车辆上使用的大多是传统的被动横向稳定杆,当车身侧倾时,稳定杆的一端 向上抬,另一端向下压,利用稳定杆两端的位移差产生抗侧倾力矩,调节车身姿态。但传统 的横向稳定杆较为单一,刚度不能调节,无法随着车身的侧倾实现车辆的实时调控,难以满 足汽车在不同工况下行驶的要求。 主动式横向稳定杆是在传统横向稳定杆基础上的改进,它能实时地改变加在横向 稳定杆两端的扭矩。现有的主动横向稳定杆主要分为液压式和电机式,液压式的主动横向 稳定杆结构复杂,响应速度慢,难以满足变化较大工况的需求,可靠性不高,油液泄漏也会 污染环境。电机式主动横向稳定杆相对于液压式而言,执行机构相对简单,易于控制。诸如 中国发明专利CN108146183A,电机式主动横向稳定杆能够实现主动无级改变悬架侧倾角刚 度,提高了整车高速侧倾稳定性和低速悬架舒适性。但在目前的主动横向稳定杆中,其隔振 元件使用较为简单,因此控制模式较为单一,控制电机的利用率较低。因此,基于惯容器的 主动横向稳定装置仍有较大的开发空间。
技术实现要素:
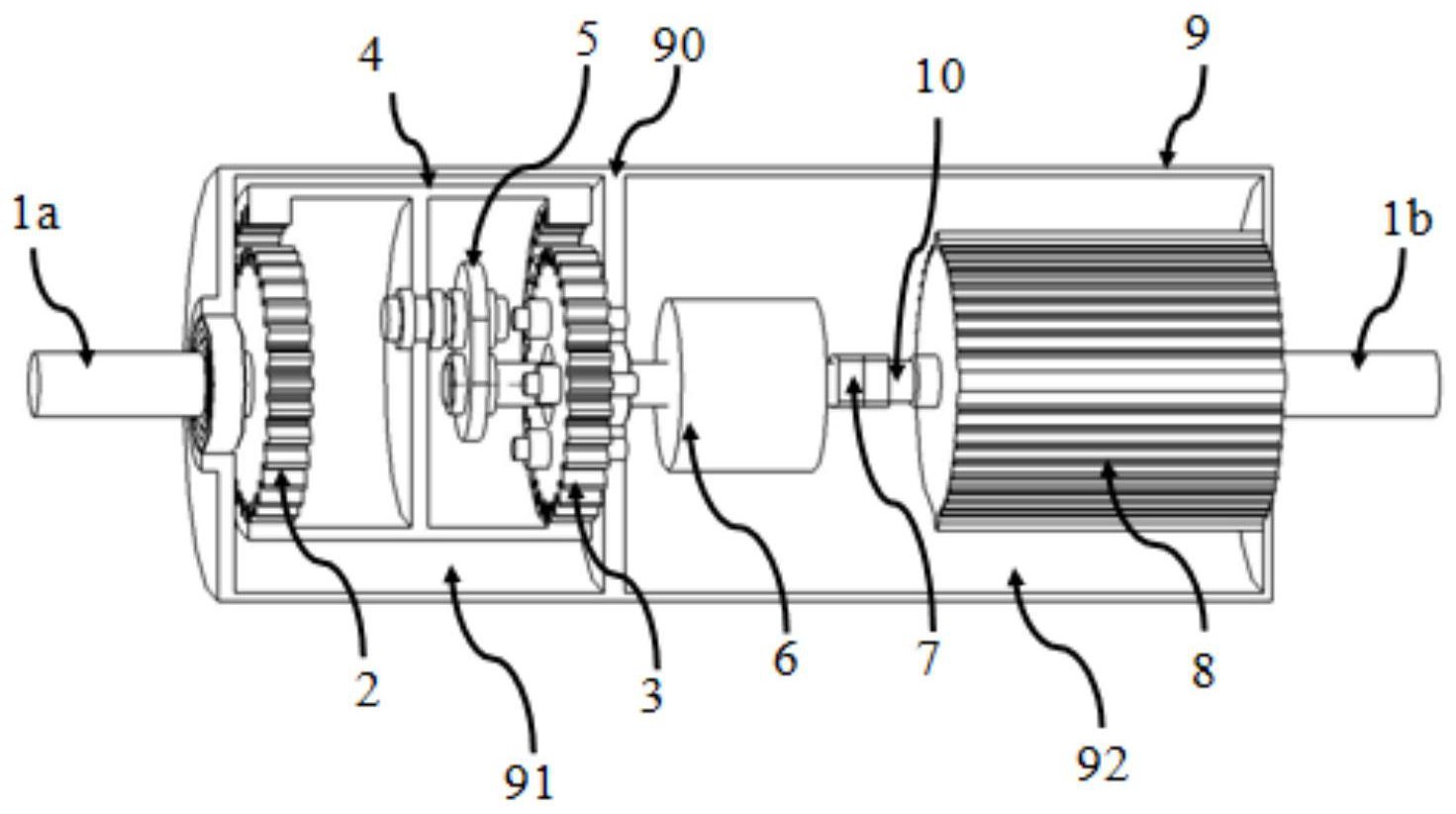
基于上述原因,本发明提供了一种基于扭转式机电惯容的横向稳定装置,可以实 现复杂的阻抗形式。由于机械结构阻抗固结不可改变,且应用于横向稳定装置中较为复杂, 采用改变电学阻抗的方案实现对复合阻抗的调整,且其作用机理简单,受非线性因素影响 较小,性能稳定。 为实现上述发明目的所采用的技术手段为: 一种基于扭转式机电惯容的横向稳定装置,包括:左稳定杆(1a)、右稳定杆(1b)、 扭转式惯容器、电机(8)、壳体(9);其中,壳体(9)被中间隔板(90)分成第一腔体(91)和第二 腔体(92);第一腔体(91)中设置有扭转式惯容器部分结构,第二腔体(92)中设置有飞轮(6) 和电机(8);电机(8)主体部分与壳体(9)固定连接,电机(8)具有电机输出轴(10),电机输出 轴(10)与转臂机构输出轴(53)连接;其中,扭转式惯容器包括第一齿轮(2)、第二齿轮(3)、 4 CN 111572306 A 说 明 书 2/5 页 双联内齿轮(4)、转臂机构(5)、飞轮(6);其中,双联内齿轮(5)包括中间板(40)、第一齿圈 (41)、第二齿圈(42),第一齿圈(41)和第二齿圈(42)被中间板(40)隔开;第一齿圈(41)与第 一齿轮(2)啮合,第二齿圈(42)与第二齿轮(3)啮合,所述双联内齿轮(4)的中间板(40)上设 有偏心孔,转臂机构(5)通过偏心孔与双联内齿轮(4)连接,转臂机构输出轴(53)上设置有 飞轮(6);所述左稳定杆(1a)左端连接左车轮悬架,右端固定连接第一齿轮(2),左稳定杆 (1a)安装在壳体(9)中;所述右稳定杆(1b)左端与壳体(9)固定连接,右端连接右车轮悬架。 进一步地,所述转臂机构(5)包括转臂机构输入轴(51)、转动盘(52)、转臂机构输 出轴(53);其中,转臂机构输入轴(51)与双联内齿轮(4)的中间板(40)上的偏心孔相连;转 动盘(52)一端与转臂机构输入轴(51)固定连接,另一端与转臂机构输出轴(53)固定连接; 转臂机构输出轴(53)穿过第二齿轮(3)的通孔34,第二齿轮(3)空套在转臂机构输出轴(53) 上;所述转臂机构输出轴(53)穿过壳体(9)的中间隔板(90),转臂机构输出轴(53)与中间隔 板(90)之间安装有球轴承,所述转臂机构输出轴(53)与所述飞轮(6)焊接固定。 进一步地,所述转臂机构(5)还包括第一卡环(54)、第二卡环(55)、第三卡环(56)、 第四卡环(57)、第五卡环(58)与第六卡环(59);其中,转臂机构输入轴(51)与双联内齿轮4 的中间板(40)通过左右安装第一卡环(54)和第二卡环(55)固定;转动盘(52)一端与转臂机 构输入轴(51)通过左右两端安装第三卡环(56)、第四卡环(57)固定,另一端与转臂机构输 出轴(53)通过左右两端第五卡环(58)、第六卡环(59)固定。 进一步地,电机(8)对外电连接储能装置,当所述电机输出轴(10)与电机(8)相对 转动时,产生的电能提供给储能装置,此时横向稳定装置工作在馈能工作模式,对能量进行 回收。 进一步地,电机(8)对外电连接外接电路,外接电路包括电感、电阻和电容,此时, 横向稳定装置工作在被动控制模式,两端相对扭转振动通过扭转式惯容器形成惯容器输出 轴与电机之间的相对转动,电机产生励磁电流,励磁电流由于外接电路的阻抗进而衰减系 统的扭转振动。 进一步地,电机(8)外接电源和控制器,控制器用于控制电机(8),电源用于给电机 (8)供电,当横向稳定装置处于主动控制模式时,控制器控制电机(8)电流输入,驱动电机输 出轴(10)旋转,电机转矩通过转臂机构(5)与双联内齿轮(4),向左经第一齿轮(2)传输到左 稳定杆(1a),向右经第二齿(3)与壳体(9)传输到右稳定杆(1b),实现电机(8)对于左右稳定 杆的主动控制。 进一步地,第二齿轮(3)包括齿轮本体(31)、至少一个螺母(32)和至少一个螺栓 (33)、通孔(34);至少一个螺栓(33)一端与壳体(9)的中间隔板(90)焊接固定,另一端连接 齿轮本体(31),并分别通过多个螺母(32)进行紧固,第二齿轮(3)与壳体(9)形成固定连接。 进一步地,左稳定杆(1a)通过轴承安装在壳体(9)中;转臂机构输出轴(53)与中间 隔板(90)之间安装有球轴承。 本发明的有益效果在于:本发明公开的一种基于扭转式机电惯容的横向稳定装 置,将质量元件惯容器引入到横向稳定装置的系统中,丰富了横向稳定装置的可用元件,机 电惯容器不仅拓宽了横向稳定系统的控制方式,亦可有效提升系统隔振性能。此外,本发明 可工作在三种工作模式:(1)馈能模式;(2)被动控制模式;(3)主动控制模式。馈能模式下可 有效地实现系统的扭转振动的能量回收;被动控制模式下可将复杂的机械网络通过电网络 5 CN 111572306 A 说 明 书 3/5 页 进行模拟实现,同时实现复杂机电网络的一体化集成设计;主动控制模式下可将机电惯容 作为力发生器,根据横向稳定装置左右端相对扭转振动特点,通过控制器输出控制电流,产 生控制力矩衰减扭转振动,实现横向稳定系统的主动控制,提升了横向稳定系统的振动抑 制性能,进而提升了车辆的行驶稳定性。 附图说明 下面结合附图对本发明作进一步发明。 图1是一种基于扭转式机电惯容的横向稳定装置的结构示意图。 图2是图1的剖视图。 图3是图2中A-A剖视图。 图4是图1中齿轮Ⅱ的结构示意图。 图5是图1中转臂的结构示意图。 图6是图1中联轴器的结构示意图。 图7是被动控制原理图。 其中,标记说明如下: 1a-左稳定杆;1b-右稳定杆;2-第一齿轮;3-第二齿轮;31-第二齿轮本体;32-螺 母;33-螺栓;34-通孔;4-双联内齿轮;40-中间板;41-第一齿圈;42-第二齿圈;5-转臂机构; 51-转臂机构输入轴;52-转动盘;53-转臂机构输出轴;54-第一卡环;55-第二卡环;56-第三 卡环;57-第四卡环;58-第五卡环;59-第六卡环;6-飞轮;7-联轴器;71-联轴器左端;72-联 轴器右端;8-电机;9-壳体;90-中间隔板;91-第一腔体;92-第二腔体;电机输出轴10。











