
技术摘要:
本发明提供一种超声导航系统及方法,涉及超声辅助扫查技术领域,包括:超声设备,扫查得到目标切面图像;位姿采集装置,获取超声探头的实时位姿信息;数据处理装置,根据标准切面图像对目标切面图像处理得到偏移位置信息;首次扫查时将偏移位置信息作为超声探头的当前 全部
背景技术:
超声成像,是一种医学成像技术,它利用高频声波来观察生物体内的结构。因为超 声图像是实时采集,所以超声图像还可以显示人体内部器官的运动和血液流经人体血以及 组织硬度等情况。与x射线成像不同,超声成像不涉及电离辐射,因此能够延长超声成像的 使用时间,而不会因长时间的辐射照射而对组织和内脏器官造成损害。超声图像是通过测 量超声波在人体结构上的反射而成。超声波信号的强度和声波在体内传播的时间为计算图 像提供必要的信息。 与其他主要的医学成像方法相比,超声在诊断医生和患者方面具有一些优势。首 先,超声成像提供实时图像。此外,超声成像作为便携式设备,可以带到病人的床边。此外, 作为一个实际问题,超声成像设备的成本大大低于其他医疗成像设备,并且不使用有害的 电离辐射。不过即使如此,想要获取生成优质的超声图像,仍然高度依赖于熟练的操作人 员。 在这方面,取决于身体部位的选择成像,熟练的操作员必须清楚超声探头的初始 放置位置。然后,操作员必须知道如何对探测器进行空间定向,最后操作员必须知道如何移 动探头以获得所需图像。一般情况下,超声操作员根据超声过程中产生的图像提供的视觉 反馈,来引导探头的初始放置、定位和移动。因此,从本质上讲,探头的导航是一个手动过 程,需要反复尝试。简而言之,现代的超声导航技术并不是最优的。
技术实现要素:
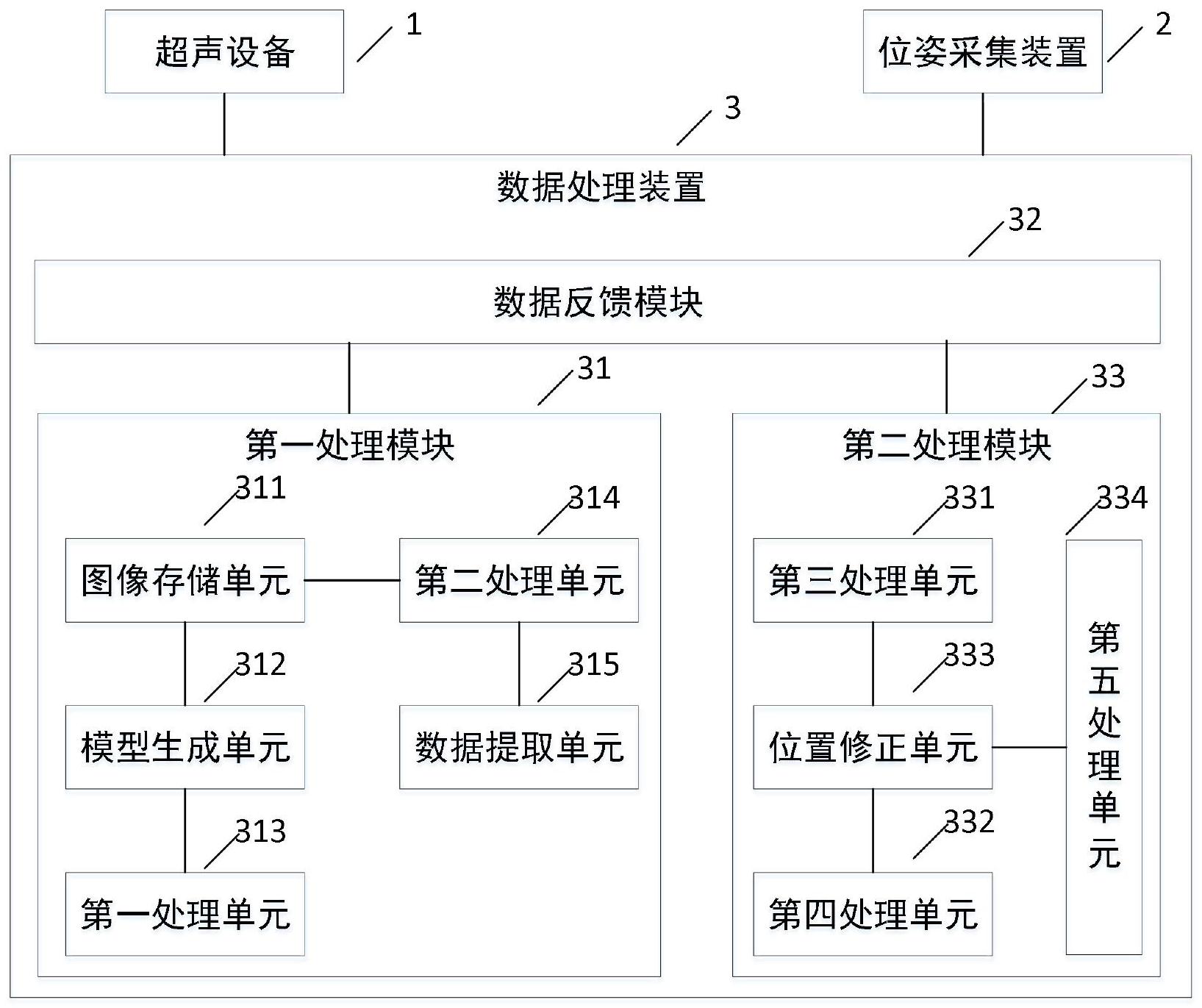
针对现有技术中存在的问题,本发明提供一种超声导航系统,具体包括: 超声设备,具有一超声探头,针对目标扫查器官的每个目标切面,操作人员通过所 述超声探头扫查得到相应的目标切面图像并输出; 位姿采集装置,安装于所述超声探头上,用于在所述超声探头的扫查过程中获取 关联于所述目标切面图像的所述超声探头的实时位姿信息并输出; 数据处理装置,分别连接所述超声设备和所述位姿采集装置,所述数据处理装置 包括: 第一处理模块,用于根据预先获取的标注有偏移位置信息的若干标准切面图像, 对每次扫查得到的所述目标切面图像进行处理,得到所述目标切面图像的所述偏移位置信 息并输出; 数据反馈模块,连接所述第一处理模块,用于在首次接收到所述偏移位置信息时, 将所述偏移位置信息作为所述超声探头的当前偏移数据反馈至所述超声设备; 所述操作人员根据所述当前偏移数据对所述超声探头进行扫查位置调整; 第二处理模块,连接所述数据反馈模块,用于在每次对所述超声探头进行位置调 5 CN 111544036 A 说 明 书 2/7 页 整后,根据当前扫查位置对应的所述偏移位置信息和所述实时位姿信息,以及上一扫查位 置对应的所述偏移位置信息和所述实时位姿信息,处理得到当前扫查位置的所述超声探头 的所述当前偏移数据并反馈至所述超声设备; 所述操作人员根据所述当前偏移数据对所述超声探头进行扫查位置调整,直至所 述当前偏移数据满足预设的偏移阈值,完成所述目标切面的扫查导航过程并保存相应的所 述目标切面图像以供后续分析使用。 优选的,所述位姿采集装置为惯性测量单元。 优选的,所述偏移位置信息为所述标准切面图像的扫查位置相对于预设的标准切 面位置的偏移数据,所述偏移位置信息包括偏差距离信息和/或偏差角度信息。 优选的,所述第一处理模块包括: 图像存储单元,用于保存预先获取的标注有偏移位置信息的若干标准切面图像; 模型生成单元,连接所述图像存储单元,用于根据各所述标准切面图像训练得到 一偏移位置评估模型; 第一处理单元,连接所述模型生成单元,用于将所述目标切面图像输入所述偏移 位置评估模型,得到所述目标切面图像的所述偏移位置信息并输出。 优选的,所述第一处理模块还包括: 第二处理单元,连接所述图像存储单元,用于分别计算所述目标切面图像与各所 述标准切面图像之间的相似度,并将各所述相似度加入一相似度序列; 数据提取单元,连接所述第二处理单元,用于由所述相似度序列中提取数值最大 的所述相似度,并输出所述相似度关联的所述目标切面图像的所述偏移位置信息。 优选的,所述第二处理模块包括: 第三处理单元,用于获取当前扫查位置扫查得到的所述目标切面图像对应的所述 偏移位置信息,以及上一扫查位置扫查得到的所述目标切面图像对应的所述偏移位置信 息,并计算两所述偏移位置信息之间的差值作为第一偏移数据; 第四处理单元,用于获取当前扫查位置的所述超声探头的所述实时位姿信息,以 及上一扫查位置的所述超声探头的所述实时位姿信息,并计算两所述实时位姿信息之间的 差值作为第二偏移数据; 位置修正单元,分别连接所述第三处理单元和所述第四处理单元,用于根据所述 根据所述第一调整数据对所述第二调整数据进行位置修正得到修正调整数据; 第五处理单元,连接所述位置修正单元,用于根据所述修正调整数据和上一次反 馈输出的所述当前偏移数据处理得到当前扫查位置的所述当前偏移数据并反馈至所述超 声设备。 优选的,采用卡尔曼滤波方法进行位置修正得到所述修正调整数据。 一种超声导航方法,应用于以上任意一项所述的超声导航系统,所述超声导航方 法包括: 步骤S1,所述超声导航系统根据预先获取的标注有偏移位置信息的若干标准切面 图像,对扫查得到的所述目标切面图像进行处理,得到所述目标切面图像的所述偏移位置 信息; 步骤S2,所述超声导航系统针对目标扫查器官的每个目标切面,判断是否首次收 6 CN 111544036 A 说 明 书 3/7 页 到所述目标切面图像: 若是,则转向步骤S3; 若否,则转向步骤S4; 步骤S3,所述超声导航系统将所述偏移位置信息作为所述超声探头的当前偏移数 据反馈至所述超声设备,随后转向步骤S5; 步骤S4,所述超声导航系统根据当前扫查位置对应的所述偏移位置信息和所述实 时位姿信息,以及上一扫查位置对应的所述偏移位置信息和所述实时位姿信息,处理得到 当前扫查位置的所述超声探头的所述当前偏移数据并反馈至所述超声设备; 步骤S5,所述操作人员根据所述当前偏移数据对所述超声探头进行扫查位置调 整,随后返回所述步骤S4,直至所述当前偏移数据满足预设的偏移阈值,完成所述目标切面 的扫查导航过程并保存相应的所述目标切面图像以供后续分析使用。 优选的,所述步骤S4具体包括: 步骤S41,所述超声导航系统获取当前扫查位置扫查得到的所述目标切面图像对 应的所述偏移位置信息,以及上一扫查位置扫查得到的所述目标切面图像对应的所述偏移 位置信息,并计算两所述偏移位置信息之间的差值作为第一调整数据; 步骤S42,所述超声导航系统获取当前扫查位置的所述超声探头的所述实时位姿 信息,以及上一扫查位置的所述超声探头的所述实时位姿信息,并计算两所述实时位姿信 息之间的差值作为第二调整数据; 步骤S43,所述超声导航系统根据所述根据所述第一调整数据对所述第二调整数 据进行位置修正得到修正调整数据; 步骤S44,所述超声导航系统根据所述修正调整数据和上一次反馈输出的所述当 前偏移数据处理得到当前扫查位置的所述当前偏移数据并反馈至所述超声设备。 优选的,所述步骤S43中,采用卡尔曼滤波方法进行位置修正得到所述修正调整数 据。 上述技术方案具有如下优点或有益效果:将根据标注有偏移位置信息的标准切面 图像处理得到的偏移位置信息与位姿采集装置采集得到的实时位姿信息相结合进行位置 修正,有效提升超声探头的位置精准度,同时将位置修正结果实时反馈给操作人员,为操作 人员提供实时的超声导航信息,帮助操作人员获取标准的目标切面图像,无需依赖于操作 人员的超声扫查经验。 附图说明 图1为本发明的较佳的实施例中,一种超声导航系统的结构示意图; 图2为本发明的较佳的实施例中,一种超声导航方法的流程示意图; 图3为本发明的较佳的实施例中,偏移位置修正的流程示意图。











