
技术摘要:
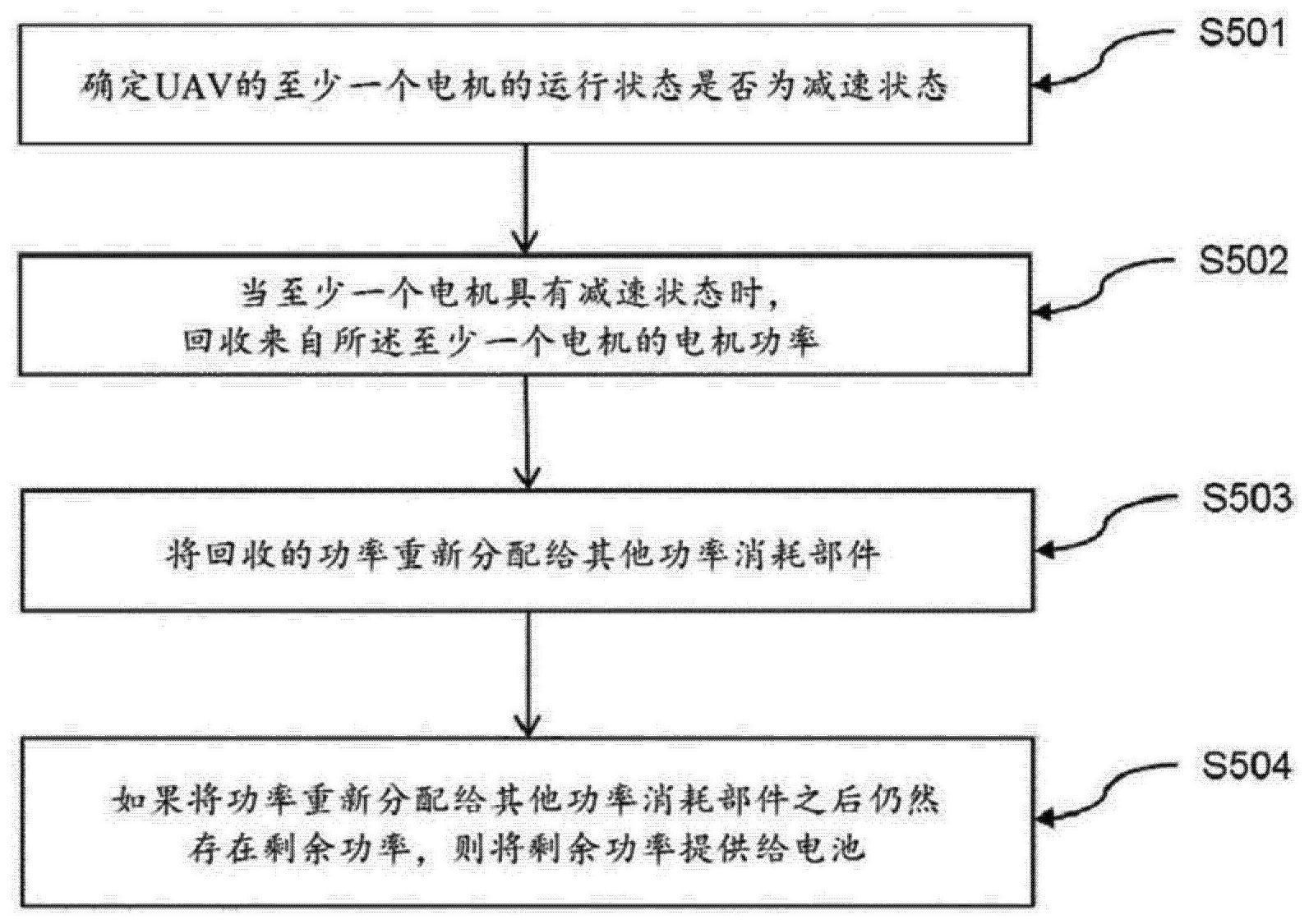
提供了一种回收可移动物体的电机功率的方法和系统,所述方法包括:借助于处理器,确定所述可移动物体的至少一个电机的操作状态,其中所述至少一个电机用于驱动所述可移动物体;以及当所述至少一个电机具有减速状态的操作状态时,回收来自所述至少一个电机的功率;其中 全部
背景技术:
在一些情况下,可以期望诸如多旋翼UAV等多旋翼飞行器改变多个功率部件中的 每个功率部件(例如,螺旋桨和电机)的功率,以便实现各种飞行控制方案。然而,在电机的 减速状态期间,由电机在先前加速状态的动能生成的剩余功率可以简单通过功率部件的阻 尼而消耗掉,这降低了UAV的能量效率。
技术实现要素:
在一些情况下,为了提高能量效率并且延长电池寿命,可以期望诸如无人飞行器 (UAV)等飞行器重新收集由UAV的电机的动能所生成的功率,特别是那些处于减速状态的电 机的动能。本发明提供了用于回收来自诸如UAV等可移动物体的一个或多个电机的功率的 方法和系统。本发明的方法和系统可以在UAV处于飞行状态时确定诸如UAV等可移动物体的 至少一个电机的操作状态,并且在电机具有减速状态时回收由所述至少一个电机的动能生 成的功率。回收自所述至少一个电机的功率可以包括由该电机的反电动势(BEMF)生成的电 流。 本发明的方面可以包括回收可移动物体的电机功率的方法,所述方法包括:借助 于处理器,确定所述可移动物体的至少一个电机的操作状态,其中所述至少一个电机用于 驱动所述可移动物体;以及当所述至少一个电机具有减速状态的操作状态时,回收来自所 述至少一个电机的功率;其中确定所述至少一个电机的操作状态包括确定所述至少一个电 机的反电动势是否高于施加在所述至少一个电机上的电压。 在一些实施方式中,当所述至少一个电机的所述反电动势高于施加在所述电机上 的电压时,所述至少一个电机具有所述减速状态的操作状态。 在一些实施方式中,回收来自所述至少一个电机的功率包括回收由所述至少一个 电机的反电动势生成的电流。 在一些实施方式中,所述可移动物体为无人飞行器,每个电机用于驱动对应旋翼。 在一些实施方式中,所述无人飞行器在飞行期间实现各种飞行模式,所述至少一 个电机的功率连续地改变。 在一些实施方式中,全部电机都处于减速状态,将从处于减速状态的电机回收的 功率直接提供给所述无人飞行器的相机、传感器和/或飞行控制器。 在一些实施方式中,回收来自所述至少一个电机的功率包括将来自电机运动的动 能转化为电能。 在一些实施方式中,响应于使所述至少一个电机制动的信号而启动所述至少一个 3 CN 111572356 A 说 明 书 2/20 页 电机的所述减速状态。 在一些实施方式中,所述方法还包括将所述回收的功率提供给不处于减速状态的 一个或多个电机。 在一些实施方式中,所述方法还包括将未提供给所述一个或多个电机的剩余功率 提供给电池。 在一些实施方式中,所述方法还包括将所述回收的功率提供给电池。 在一些实施方式中,所述方法还包括将生成的电流馈送至电源总线。 在一些实施方式中,使用磁场定向控制方法来进行回收来自所述至少一个电机的 功率。 在一些实施方式中,所述磁场定向控制方法包括确定所述至少一个电机的转子的 位置。 本发明的另一方面可以包括用于回收可移动物体的电机功率的系统,所述系统用 于执行所述方法。 应当明白,本发明的不同方面可以被单独地、共同地或彼此组合地理解。本文所描 述的本发明的各个方面可以适用于下文阐述的特定应用中的任一或者任何其他类型的可 移动物体。本文对诸如无人飞行器等飞行器的任何描述均可适用于和用于任何可移动物 体,诸如任何载运工具。另外,本文在空中运动(例如,飞行)的情景下公开的系统、装置和方 法还可以适用于其他类型运动的情景下,诸如在地面上或在水上的移动、水下运动或者在 太空中的运动。 通过考察说明书、权利要求书和附图,本发明的其他目标和特征将会变得明显。 援引并入 本说明书中所提及的所有出版物、专利和专利申请均通过引用而并入本文,其程 度犹如具体地和个别地指出要通过引用并入每一单个出版物、专利或专利申请。 附图说明 本发明的新颖特征特别地在所附权利要求中阐述。通过参考以下的详细说明及其 附图,将更好地理解本发明的特征和优势;该详细说明阐述了利用本发明原理的说明性实 施方式;在附图中: 图1示出根据本发明实施方式的无人飞行器(UAV)的示意图。 图2示出根据本发明实施方式的UAV的外视图的示例。 图3示出根据本发明实施方式的UAV的电源总线配置的示例。 图4是根据本发明实施方式的示出电机功率回收系统的示例的框图。 图5是根据本发明实施方式的图示了回收UAV的电机功率的方法的流程图。 图6是根据本发明另一实施方式的图示了回收UAV的电机功率的方法的流程图。 图7是根据本发明又一实施方式的图示了回收UAV的电机功率的方法的流程图。 图8示出根据本发明实施方式的UAV的电子调速器的示例。 图9图示了根据本发明实施方式的UAV的外观。 图10图示了根据本发明实施方式的包括载体和负载的可移动物体。 图11是根据本发明实施方式的用于控制可移动物体的系统的通过框图来说明的 4 CN 111572356 A 说 明 书 3/20 页 示意图。











